Cubic Splines and Bicubic Patches
SPLINES
The word "spline" had its origin in ship building. To create smooth hull shapes, ancient ship builders would drive pegs into the ground, and then lay down a very large thin flexible strip of wood (the "spline") that would be forced into a curve by the position of the pegs.
They would then use the resulting smooth curve as a guide for cutting the lumber that they would use to create the hulls of their ships.
|
In more recent times, beginning in the 1960s,
designers in the automotive and aerospace industries started
using computer software to generate smooth curves when
designing their vehicles.
Their key innovation was to use parametric cubic curves and
parametric bicubic surfaces,
and that is the topic we are covering this week.
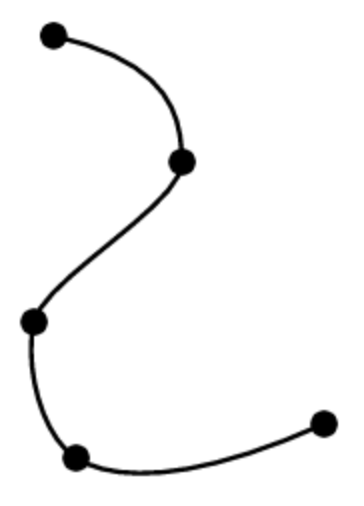
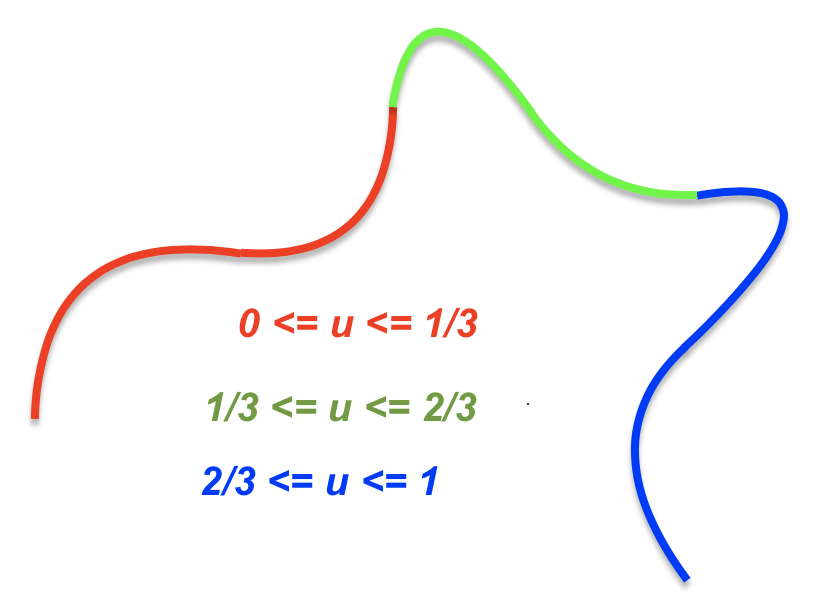
PARAMETRIC CUBIC CURVES The underlying math for creating smooth splines is generally to create a set of parametric cubic curves that fit together seamlessly, so that they appear to form a single smooth curve. The general recipe is as follows:
After defining the above functions x(t) and y(t), it's easy to draw the resulting spline segment. For example:
function drawSpline(x, y, dt) {
let a = [x(0), y(0)];
for (let t = dt ; t <= 1 ; t += dt) {
let b = [x(t), y(t)];
drawLine(a, b); // we are assuming some drawLine() function has been defined.
a = b;
}
}
Creating more complex curves
[ [ax,bx,cx,dx] , [ay,by,cy,dy] , [az,bz,cz,dz] ]i
TRANSLATING FROM THE HUMAN DESIGNER TO THE COMPUTER For most human beings, it would be extremely difficult to design such curves by directly typing the coefficients of cubic polynomials. For this reason, we create other ways of defining those coefficients, which are more human-friendly. All such methods work by transforming some easier to understand set of values into the underlying cubic coefficients (a,b,c,d). In class we went over two of the more important such methods, Hermite splines and Bezier splines.
HERMITE SPLINES If our human user wants to define things in terms of the position and orientation at the beginning and end of each cubic spline segment, then we use the Hermite spline. We do all the math independently for each coordinate (eg: x and y, or x,y and z).
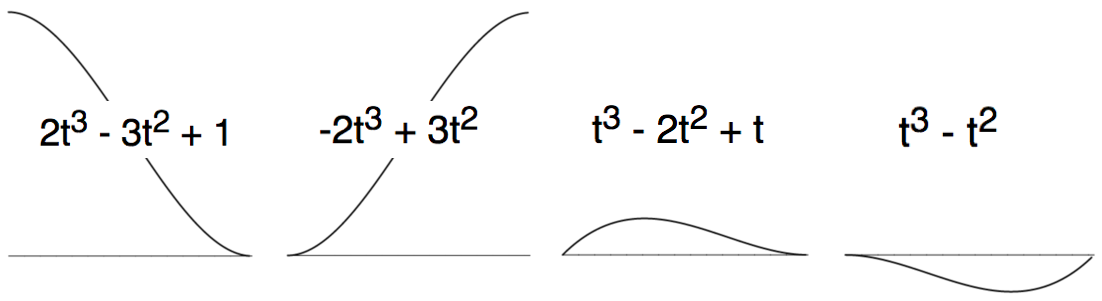
P0 = value at start of the segment (where t = 0). We create four "basis functions", each of which varies only one thing:
So to get from (P0,P1,R0,R1) to the coefficients (a,b,c,d) that define cubic polynomial a * t^3 + b * t^2 + c * t + d, we apply the Hermite Basis Matrix, which is just a way of describing these four basis functions. Each of the four functions is described in a single column of the Hermite Matrix:
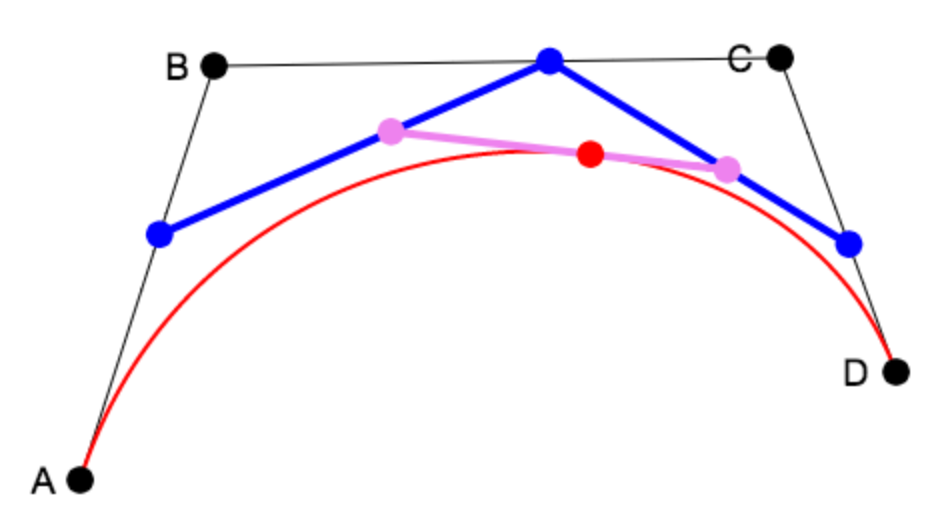
BEZIER SPLINES If our human user wants to define things by moving points around on a screen, then the Bezier spline is a good choice. Again, we do the math independently for each coordinate.
A = value at start of the segment (where t = 0).
In other words:
(1-t) * ( (1-t) * ((1-t)*A + t*B) + t * ((1-t)*B + t*C) )
+
t * ( (1-t) * ((1-t)*B + t*C) + t * ((1-t)*C + t*D) )
When you multiply everything out, this turns into:
(1-t) * (1-t) * (1-t) * A +
3 * (1-t) * (1-t) * t * B +
3 * (1-t) * t * t * C +
t * t * t * D
This gives us what we need to go from key values (A,B,C,D) to cubic coefficients (a,b,c,d). Each line of the above equation can be turned into a column of the characteristic Bezier Basis Matrix:
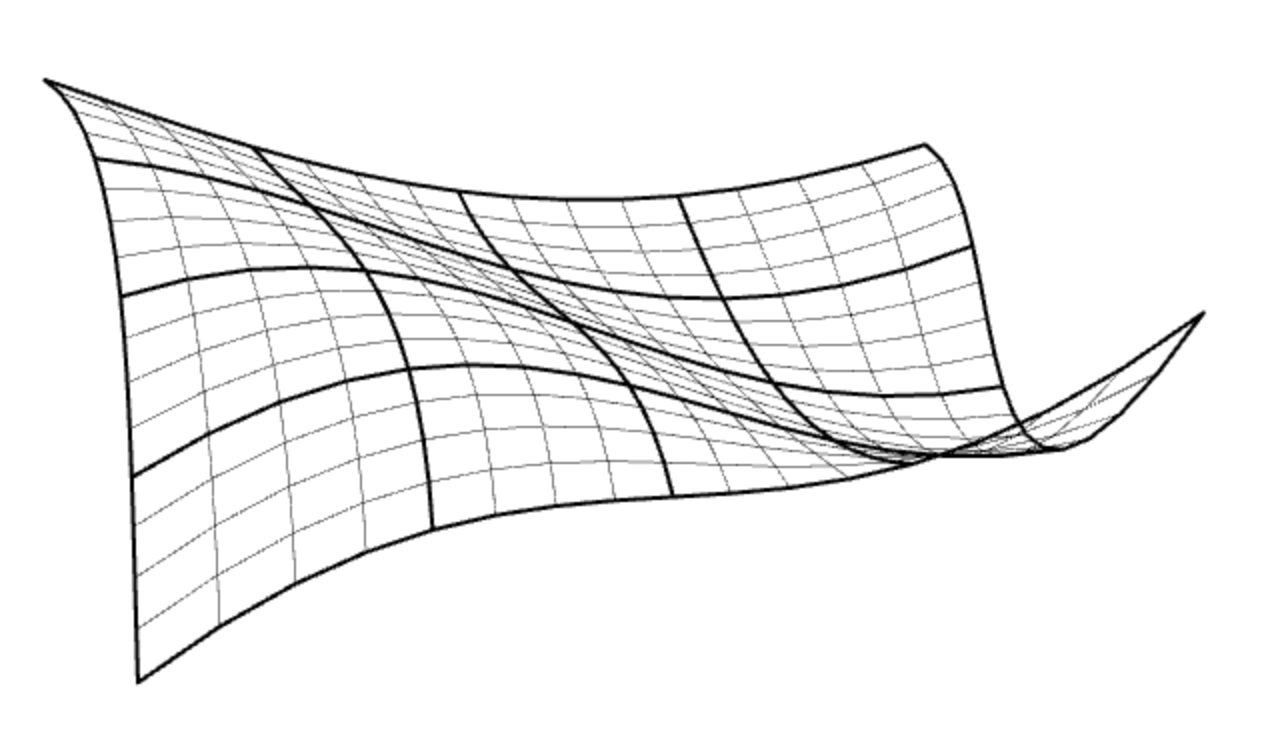
BEZIER BICUBIC SURFACE PATCHES
For example, each point in the above patch was determined by applying a Bezier transformation to a 4x4 matrix P of 16 key points:
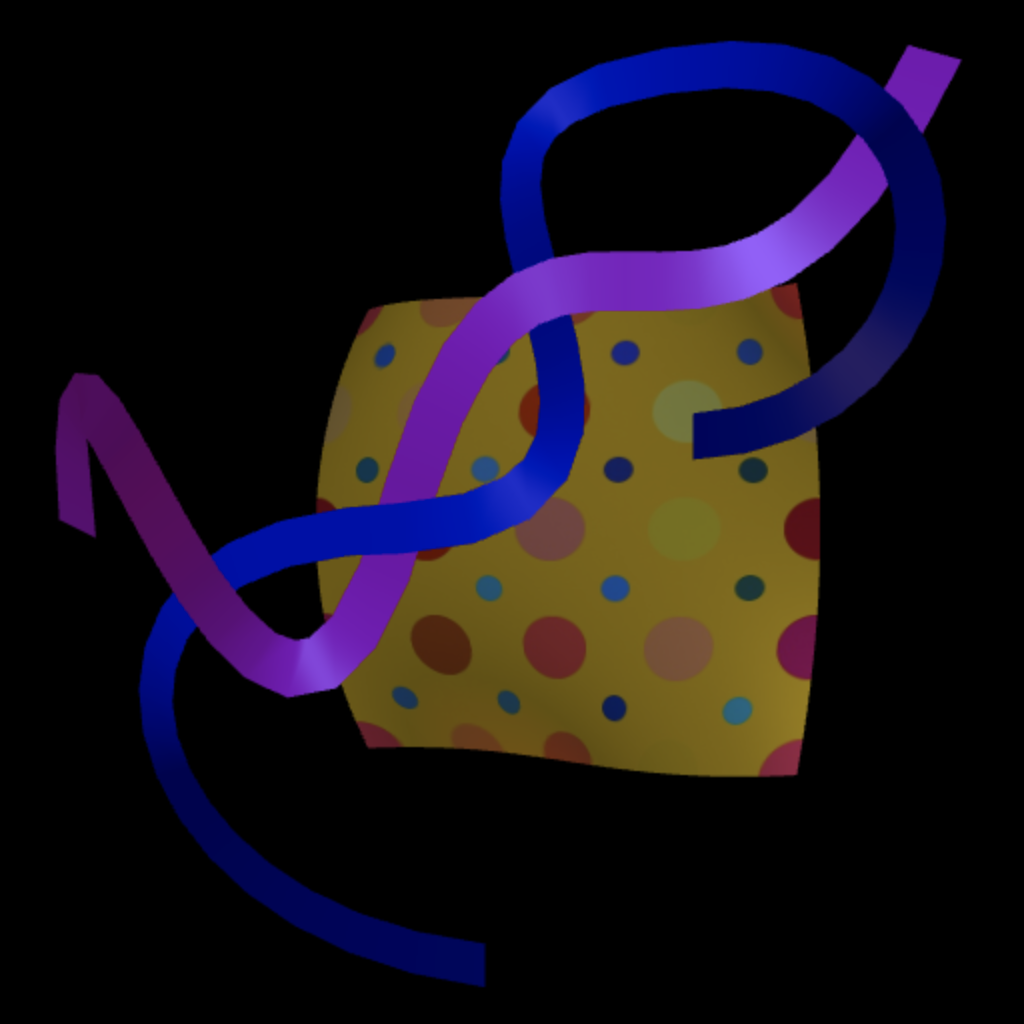
A NOTE ON COMPUTING SURFACE NORMALS TO MAKE SHAPES LOOK ROUNDED As we discussed in class, here is a general purpose way to compute surface normals to create the appearance of a smooth rounded surface.
V = [0,0,0]
For every three successive vertices A,B,C of the face, going around counterclockwise:
V += cross(B - A, C - B)
Recall that cross product of two vectors [ax,ay,az] and [bx,by,bz] is:
[ ay*bz - az*by , az*bx - ax*bz , ax*by - ay*bx ]
Note that you will need to do some bookkeeping
to know which faces adjoin which vertices.
This is actually quite easy in the special case where you have a rectangular mesh.
In that special case, you just need to compute the face
normal for every quad (that is, rectangular face) lower bounded on the grid by
Then for every vertex at (col-1,row-1) , (col,row-1) , (col-1,row) , (col,row) HOMEWORK
Some additional notes on the code in the homework:
|