V22.0201 Computer Systems Organization
2018-19 Fall—Allan Gottlieb
Tuesdays and Thursdays 3:30-4:45 Room 102 Ciww
Start Lecture #1
Chapter 0 Administrivia
I start at 0 so that when we get to chapter 1, the numbering will
agree with the text.
0.1 Contact Information
- email: my-last-name AT nyu DOT edu (best method)
- web: cs.nyu.edu/~gottlieb
- office: 60 Fifth Ave, Room 316
- office phone: 212 998 3344
0.2 Course Web Page
There is a web site for the course.
You can find it from my home page, which is listed above, or from
the department's home page.
- You can find these lecture notes on the course home page.
Please let me know if you can't find them.
- The notes are updated as bugs are found or improvements made.
As a result, I do not recommend printing the notes now (if at
all).
- I will place markers at the end of each lecture after the
lecture is given.
For example, the
Start Lecture #1
marker above can be
thought of as End Lecture #0
.
0.3 Textbook
The course has two texts.
- Bryant and O.Hallaron,
Computer Systems: A programmer's Perspective
- We will also study the C programming language so you will need a
book on C.
I own, like, and will use Kernighan and Richie (Richie is the
creator of C).
However, if you already own another C book, that is probably good
enough.
0.4 Email, and the Class Mailing List
- You should have all been automatically added to the mailing list
for this course and should have received a test message from
me.
- Mail to the list should be sent to OS-201-FA18-fadd@nyu.edu
- Membership on the list is Required; I assume
that messages I send to the mailing list are read.
- If you want to send mail just to me, use my-last-name AT nyu DOT
edu not the mailing list.
- Questions on the labs should go to the mailing list.
You are encouraged to answer questions posed on the list as well.
Note that replies are sent to the list.
- I will respond to all questions.
If another student has answered the question before I get to it, I
will confirm if the answer given is correct.
- Please use proper mailing list etiquette.
- Send plain text messages rather than (or at
least in addition to) html.
- Use
Reply
to contribute to the current thread,
but NOT to start another topic.
- If quoting a previous message, trim off irrelevant parts.
- Use a descriptive Subject: field when starting a new topic.
- Do not use one message to ask two unrelated questions.
- As you will see, when I respond to a message, I either place my
reply after the original text or interspersed with it (rather than
putting the reply at the top).
This preference is most relevant for detailed questions that lead
to serious conversations involving many messages.
I find it quite useful when reviewing a serious conversations to
have the entire conversation in chronological order.
I believe you would also find it useful when reviewing for an
exam.
0.5 Grades
Grades are based on the labs and exams; the weighting will be
approximately
30%*LabAverage + 30%*MidtermExam + 40%*FinalExam (but see homeworks
below).
0.6 The Upper Left Board
I use the upper left board for lab/homework assignments and
announcements.
I should never erase that board.
Viewed as a file it is group readable (the group is those in the
room), appendable by just me, and (re-)writable by no one.
If you see me start to erase an announcement, please let me know.
I try very hard to remember to write all announcements on the upper
left board and I am normally successful.
If, during class, you see that I have forgotten to record something,
please let me know.
HOWEVER, even if I forgot and no one reminds me,
the assignment has still been given.
0.7 Homeworks and Labs
I make a distinction between homeworks and labs.
Labs are
- Required.
- Due several lectures later (date given on assignment).
- Announced in the notes and during class class.
Details in NYU Classes with supplemental material on separate web
pages.
Your solution is submitted via NYU Classes.
- Graded and form part of your final grade.
- Penalized for lateness.
- The penalty is 1 point per day up to 10 days; then 5 points
per day.
- This penalty is too mild—a one week late lab can be an
A; two weeks late might be a C.
Homeworks are
- Optional.
- Due the beginning of two lectures later.
- Not accepted late.
- The assignment is given in the notes and NYU Classes; your
solution is submitted via Classes.
- Checked for completeness and graded 0/1/2.
- Able to help, but not hurt, your final grade.
0.7.1 Homework Numbering
Homeworks are numbered by the class in which they are assigned.
So any homework given today is homework #1.
Even if I do not give homework today, any homework assigned next
class would be homework #2.
So the homework present in the notes for lecture #n is homework #n
(even if I inadvertently forgot to write it to the upper left
board).
0.7.2 Doing Labs on non-NYU Systems
You may develop (i.e., write and test) lab assignments on
any system you wish, e.g., your laptop.
However, ...
- You are responsible for any non-nyu machine.
I extend deadlines if the nyu machines are down, not if yours are.
So you should back up on an nyu server any work done on your
personal computers.
- You should test your assignments on the nyu systems, for this
class that means
courses2.cims.nyu.edu.
More on how to do this later.
- If some confusion arises, I can (and do) believe dates on
courses2 and friends.
I can not believe dates on your laptop since you
can change them backwards in time.
- In an ideal world, a program written in a high level language
such as Python, Java, C, or C++ that works on one system would
also work on any other system.
Sadly, this ideal is not always achieved, despite marketing claims
to the contrary.
So, although you may develop your lab on any system, you
must ensure that it runs on courses2, which the TAs
will use when grading your labs.
- You submit your labs using
NYU Classes
.
0.7.3 Obtaining Help with the Labs
Good methods for obtaining help include
- Asking me during office hours (see my home page for my hours).
- Asking the mailing list.
- Asking another student.
- But ...
Your lab must be your own.
That is, each student must submit a unique lab.
Naturally, simply changing comments, variable names, etc. does
not produce a unique lab.
0.7.4 Computer Language Used for Labs
This course uses the C computer language.
0.8 A Grade of Incomplete
The rules for incompletes and grade changes are set by the school>
and not the department or individual faculty member.
The rules set by CAS can be found in
<http://cas.nyu.edu/object/bulletin0608.ug.academicpolicies.html>,
which states:
The grade of I (Incomplete) is a temporary grade that
indicates that the student has, for good reason, not
completed all of the course work but that there is the
possibility that the student will eventually pass the
course when all of the requirements have been completed.
A student must ask the instructor for a grade of I,
present documented evidence of illness or the equivalent,
and clarify the remaining course requirements with the
instructor.
The incomplete grade is not awarded automatically. It is
not used when there is no possibility that the student
will eventually pass the course. If the course work is
not completed after the statutory time for making up
incompletes has elapsed, the temporary grade of I shall
become an F and will be computed in the student's grade
point average.
All work missed in the fall term must be made up by the end of the
following spring term.
All work missed in the spring term or in a summer session must be
made up by the end of the following fall term.
Students who are out
of attendance in the semester following the one in which the course
was taken have one year to complete the work.
Students should contact the College Advising Center for an Extension
of Incomplete Form, which must be approved by the
instructor.
Extensions of these time limits are rarely granted.
Once a final (i.e., non-incomplete) grade has been submitted by the
instructor and recorded on the transcript, the final grade cannot be
changed by turning in additional course work.
0.9Academic Integrity Policy
This email from the assistant director, describes the policy.
Dear faculty,
The vast majority of our students comply with the
department's academic integrity policies; see
www.cs.nyu.edu/web/Academic/Undergrad/academic_integrity.html
www.cs.nyu.edu/web/Academic/Graduate/academic_integrity.html
Unfortunately, every semester we discover incidents in
which students copy programming assignments from those of
other students, making minor modifications so that the
submitted programs are extremely similar but not identical.
To help in identifying inappropriate similarities, we
suggest that you and your TAs consider using Moss, a
system that automatically determines similarities between
programs in several languages, including C, C++, and Java.
For more information about Moss, see:
http://theory.stanford.edu/~aiken/moss/
Feel free to tell your students in advance that you will be
using this software or any other system. And please emphasize,
preferably in class, the importance of academic integrity.
Rosemary Amico
Assistant Director, Computer Science
Courant Institute of Mathematical Sciences
Remark: The chapter/section numbers for the
material on C, agree with Kernighan and Plauger.
However, the material is quite standard so, as mentioned before, if
you already own a C book that you like, it should be fine.
Chapter 1 A Tutorial Introduction
Since Java includes much of C, my treatment can be very brief for
the parts in common (e.g., control structures).
1.1 Getting Started
C programs consist of functions, which contain
statements, and variables, the latter store
values.
The Hello World Function
#include <stdio.h>
main()
{
printf("Hello, world\n");
}
- All complete programs must have a main function.
The program begins execution there.
- # introduces preprocessor directives, #include
is the most common.
#include <stdio.h> tells the preprocessor to look
in the standard place (due to the <>) for a file named
stdio.h and include it right here.
That file contains the declaration of printf().
- printf() produces formatted output.
The easiest case is simply a character string as shown here (\n
signifies a newline).
Although the this program works, the second line should be
int main(int argc, char *argv[])
Remember how long it took you to really understand
public static void main (String[] args)
1.2 Variables and Arithmetic Expressions
1.3 The For Statement
1.4 Symbolic Constants
Fahrenheight-Celsius
#include <stdio.h>
main() {
int F, C;
int lo=0, hi=300, incr=20;
for (F=lo; F<=hi; F+=incr) {
C = 5 * (F-32) / 9;
printf("%d\t%d\n", F, C);
}
}
- C has int, char, short, long, double, float
- %d means the next argument is (treated as) an int; convert it
from the internal form (two's complement binary) to printable form
(ascii, unicode, ...).
- %d uses the
right amount
of space (i.e., leaves one blank.
- \t is a tab.
- printf() accepts a variable number of arguments.
Note that the value of the first argument determines the number of
additional arguments.
- Would be better if numbers were right justified.
We must know how much space to use; in this case I know 3 digits
are enough.
- Should use floating point.
Floating Point Fahrenheight-Celcius
#include <stdio.h>
#define LO 0
#define HI 300
#define INCR 20
main() {
int F;
for (F=LO; F<=HI; F+=INCR)
printf("%3d\t%5.1f\n", F, (F-32)*(5.0/9.0));
}
- Note 5.0/9.0 to get floating point divide.
- Note %3d, which right justifies using 3 digits.
- Note %5.1f.
This means 5=3+1+1 columns total with
1 digit after the decimal point.
- Call to printf() now contains an expression instead of
just simple variable.
- #define to introduce symbolic constants.
By convention these are all caps.
1.5 Character Input and Output
getchar() / putchar()
The simplest (i.e., most primitive) form of character I/O is
getchar() and putchar(), which read and print a
single character.
Both getchar() and putchar() are defined in
stdio.h.
1.5.1 File Copying
#include <stdio.h>
main() {
int c;
while ((c = getchar()) != EOF)
putchar(c);
}
File copy is conceptually trivial: getchar() a char and
then putchar() this char until eof.
The code is on the right and does require some comment despite is
brevity.
- The program is basically just the while statement,
which has just one semicolon
- getchar() returns an int not
a char!
That is done so that we can return EOF, which is not a
char (and cannot be a char ); it is
an int (in fact it is -1).
Question: Why can't EOF be a char?
Answer: Because all chars are legal
(non-EOF) values that getchar() can return.
- C is an expression language, statements return
values.
In particular, an assignment statement returns the value of its
RHS.
This explains the condition part of the while
statement, once you notice the
extra
parens, which are
definitely not extra.
- getchar() reads from stdin and putchar()
writes to stdout.
- Illustrate in class how to use stdin/stdout and redirection.
Homework: Write a (C-language) program to print
the value of EOF.
(This is 1-7 in the book but I realize not everyone will have the
book so I will type them in.)
Homework: (1-9) Write a program to copy its input
to its output, replacing each string of one or more blanks by a
single blank.
1.5.2 Character Counting
This is essentially a one-liner (in two ways).
while (getchar() != EOF) ++numChars;
for (nc = 0; getchar() != EOF; ++nc);
1.5.3 Line Counting
Now we need two tests.
Perhaps the following is really a two-liner, but it does have only
one semicolon.
while ((c = getchar()) != EOF) if (c == '\n') ++numLines;
So if a file has no newlines, it has no lines.
Demo this with echo -n >noEOF "hello"
1.5.4 Word Counting
The Unix wc Program
The Unix wc program prints the number of characters, words, and
lines in the input.
It is clear what the number of characters means.
The number of lines is the number of newlines (so if the last line
doesn't end in a newline, it doesn't count).
The number of words is less clear.
In particular, what should be the word separators?
#include <stdio.h>
#define WITHIN 1
#define OUTSIDE 0
main() {
int c, num_lines, num_words, num_chars, within_or_outside;
within_or_outside = OUTSIDE; // C doesn't have Boolean type
num_lines = num_words = num_chars = 0;
while ((c = getchar()) != EOF) {
++num_chars;
if (c == '\n')
++num_lines;
if (c == ' ' || c == '\n' || c == '\t')
within_or_outside = OUTSIDE;
else if (within_or_outside == OUTSIDE) { // starting a word
++num_words;
within_or_outside = WITHIN;
}
}
printf("%d %d %d\n", num_lines, num_words, num_chars);
}
- This program assums blank, newline, and tab are the only word
separators.
- C doesn't have a real Boolean type.
Instead int is used; 0 is false; everything else is true.
- The key idea in the program, which is independent of the
language used, is to keep track of when we are within a word and
to bump the word counter at the the start of a
new word.
- The program begins outside a word.
- Whenever it encounters a separator, it becomes outside.
- Whenever it encounters a non-separator (i.e., a word constituent)
and was outside, then it has found the start
of a new word.
This puts the program within a word and is when it bumps the
word counter.
- Java if-then-else is the same as C.
Same for while and do / while.
Same for switch / case.
Same for continue, break, and return.
Homework: (1-12) Write a program that prints its
input one word per line.
1.6 Arrays
We are hindered in our examples because we don't yet know how to
input anything other than characters and don't want to write the
program to convert a string of characters into an integer or (worse)
a floating point number.
Mean and Standard Deviation
#include <stdio.h>
#define N 10 // imagine you read in N
main() {
int i;
float x, sum=0, mu;
for (i=0; i<N; i++) {
x = i; // imagine you read in X[i]
sum += x;
}
mu = sum / N;
printf("The mean is %f\n", mu);
}
#include <stdio.h>
#define N 10 // imagine you read in N
#define MAXN 1000
main() {
int i;
float x[MAXN], sum=0, mu;
for (i=0; i<N; i++) {
x[i] = i; // imagine you read in X[i]
}
for (i=0; i<N; i++) {
sum += x[i];
}
mu = sum / N;
printf("The mean is %f\n", mu);
}
#include <stdio.h>
#include <math.h>
#define N 5 // imagine you read in N
#define MAXN 1000
main() {
int i;
double x[MAXN], sum=0, mu, sigma;
for (i=0; i<N; i++) {
x[i] = i; // imagine you read in x[i]
sum += x[i];
}
mu = sum / N;
printf("The mean is %f\n", mu);
sum = 0;
for (i=0; i<N; i++) {
sum += pow(x[i]-mu,2);
}
sigma = sqrt(sum/N);
printf("The std dev is %f\n", sigma);
}
I am sure you know the formula for the mean (average) of N numbers:
Add the numbers and divide by N.
The mean is normally written μ.
The standard deviation is the RMS (root mean squared) of the
deviations-from-the-mean, it is normally written σ.
Symbolically, we write μ = ΣXi/N and
σ = √(Σ((Xi-μ)2)/N).
(When computing σ we sometimes divide by N-1
not N.
Ignore the previous sentence.)
The First Version (Just the Mean; No Array Used)
The first program on the right naturally
reads N, then reads N numbers, and the computes
the mean of the latter.
There is a problem; we don't know how to read numbers.
So I faked it by having N a symbolic constant and making
x[i]=i.
The Second Version (Just the Mean: Array Used)
I do not like the second version with its gratuitous array.
It is (a little) longer, slower, and more complicated.
Much worse it takes space proportional to N, for no reason.
Hence it might not run at all for large N.
However, I have seen students write such programs.
Apparently, there is an instinct to use a three step procedure for
all assignments:
- Read everything in.
- Do all the computation.
- Print all the answers.
But that is silly if, as in this example, you no longer need each
value after you have read the next one.
The Third Version Mean and Standard Deviation)
The last example is a good use of arrays for
computing the standard deviation using the RMS formula above.
We do need to keep the values around after computing the mean so
that we can compute all the deviations from the mean and, using
these deviations, compute the standard deviation.
Note that, unlike Java, no use of new (or the C analogue
malloc()) appears.
Arrays declared as in this program have a lifetime of the routine in
which they are declared.
Specifically sum and x are both allocated when
main is called and are both freed when main is finished.
Arrays in Java are references.
So, when you write in a Java function f()
int[] A = new int[3];
The lifetime of the array is not tied to the lifetime
of f().
We will battle with lifetimes in C later in the course when we look
carefully at pointers and malloc().
Non-primitive Declarations
Note the declaration int x[MAXN] in the third version.
In C, to declare a complicated variable (i.e., one that is not a
primitive type like int or char), you write what
has to be done to the variable to get one of the primitive
types.
- For example the declaration int *(x[]) says
that x is something that, if you take an element of it
and then dereference that element, then you will get an integer.
So x is an array of pointers to integers.
- int (*y)[] says that if you first
dereference y and take an element of the result, you get
an integer.
So y is a pointer to an array of integers.
- Thus int *(x[]) is not the same
as (*x)[].
- This declaration style is a controversial feature of C.
Some like it, some don't (I don't).
But that is the way it is.
In C if we have int X[10]; then writing X in your
program is the same as writing &X[0].
& is the address of
operator.
More on this later when we discuss pointers.
1.7 Functions
There is of course no limit to the useful functions one can write.
Indeed, the main() programs we have written above are all
functions.
A C program is a collection of functions (and global variables).
Exactly one of these functions must be called main and that
is the function at which execution begins.
#include <stdio.h>
// Determine letter grade from score
// Demonstration of functions
char letter_grade (int score) {
if (score >= 90) return 'A';
else if (score >= 80) return 'B';
else if (score >= 70) return 'C';
else if (score >= 60) return 'D';
else return 'F';
} // end function letter_grade
main() {
short quiz;
char grade;
quiz = 75; // should read in quiz
grade = letter_grade(quiz);
printf("For a score of %3d the grade is %c\n",
quiz, grade);
} // end main
cc -o grades grades.c; ./grades
For a score of 75 the grade is C
One important issue is type matching.
If a function f takes one int argument and
f is called with a short, then the
short must be converted to an int.
Since this conversion is widening, the compiler will automatically
coerce the short into an int, providing it knows
that an int is required.
It is fairly easy for the compiler to know all this
providing f() is defined before it is used, as in
the code on the right.
Computing Letter Grades
We see on the right a function letter_grade defined.
It has one int argument and returns a char.
Finally, we see the main program that calls the
function.
The main program uses a short to hold the
numerical grade and then calls the function with this short
as the argument.
The C compiler generates code to coerce this short value to
the int required by the function.
Averages and Sorting
// Average and sort array of random numbers
#define NUMELEMENTS 50
void sort(int A[], int n) {
int temp;
for (int x=0; x<n-1; x++)
for (int y=x+1; y<n; y++)
if (A[x] < A[y]) {
temp = A[y];
A[y] = A[y+1];
A[y+1] = temp;
}
}
double avg(int A[], int num) {
int sum = 0;
for (int x=0; x<n; x++)
sum = sum + A[x];
return (sum / n);
}
main() {
int table[NUMELEMENTS];
double average;
for (int x=0; x<NUMELEMENTS; x++) {
table[x] = rand(); /* assume defined */
printf("The elt in pos %d is %d\n",
x, table[x]);
}
average = avg(table, NUMELEMENTS );
printf("The average is %5.1f ", average);
sort(table, NUMELEMENTS );
for (x-=; x<NUMELEMENTS; x++)
printf("The element in position %3d is %3d \n",
x, table[x]);
}
The next example illustrates a function that has an array
argument.
Remember that in a C declaration you decorate
the item being
declared with enough stuff (e.g., [], *) so that the result is a
primitive type such as int, double, or
char.
The function sort has two parameters, the second one
n is simply an int.
The parameter A, however, is more complicated.
It is the kind of thing that when you take an element of it, you get
an int.
That is, A is an array of ints.
Unlike the array example in section 1.6, A does not
have an explicit upper bound on its index.
This is because the function can be called with arrays of different
sizes.
Since the function needs to know the size of the array (look at the
for loops), a second parameter n is used for
this purpose.
This example has two function calls:
main calls both avg and sort.
Looking at the call from main to sort we see that
table is assigned to A and
NUMELEMENTS is assigned to n.
Looking at the code in main itself, we see that indeed
NUMELEMENTS is the size of the array table and
thus in sort, n is the size of A.
All seems well provided the called function appears
before the function that calls it.
Our examples have followed this convention.
So far so good; but if f calls g and (recursively)
g calls f, we are in trouble.
How can we have f before g, and g before
f?
This will be answered in our next example.
Start Lecture #2
1.8 Arguments—Call by Value
Arguments in C are passed by value (the same as Java does
for arguments that are not objects).
1.9 Character Arrays
Unlike Java, C does not have a string datatype.
A string in C is an array of chars.
String operations like concatenate and copy (assignment) become
functions in C.
Indeed there are a number of standard library routines for
strings.
The most common implementation of strings in C is
null terminated
.
That is, a string of length 5 actually contains 6 characters, the 5
characters of the string itself and a sixth character = '\0' (called
null) indicating the end of the string.
Print Longest Line
This program reads lines from the terminal, converts them to C strings
by appending '\0', and prints the longest one found.
Pseudo code would be
while (more lines)
read line
if (longer than previous longest)
save line and its length
Thus we need the ability to read in a line and the ability to save
a line.
We write two functions getLine and copy for these
tasks (the book uses getline (all lower case), but that doesn't
compile for me since there is a library routine in stdio.h with the
same name and different signature).
#include <stdio.h>
#define MAXLINE 1000
int getLine(char line[], int maxline);
void copy(char to[], char from[]);
int main() {
int len, max;
char line[MAXLINE], longest[MAXLINE];
max = 0;
while ((len=getLine(line,MAXLINE))>0)
if (len > max) {
max = len;
copy(longest,line);
}
if (max>0)
printf("%s", longest);
return 0;
}
int getLine(char s[], int lim) {
int c, i;
for (i=0; i<lim-1 &&
(c=getchar())!=EOF &&
c!='\n';
++i)
s[i] = c;
if (c=='\n') {
s[i]= c;
++i;
}
s[i] = '\0';
return i;
}
void copy(char to[], char from[]) {
int i;
i=0;
while ((to[i] = from[i]) != '\0')
++i;
}
The main() Function
Given the two supporting routines, main is
fairly simple, needing only a few small comments.
- Note that getLine and copy are declared
before main.
They are defined later in the file but C requires
declare (or define) before use
so either main would have to
come last or the declarations are needed.
Since only main uses the routines, the declarations could
have been in main but it is common practice to put them
outside as shown.
- Note %s inside printf.
This is used for (null-terminated) strings.
- Note that main is declared to return an integer and
it does return 0.
In unix at least, this is the indication of a successful
run.
- Note the while loop structure.
Having a parenthesized assignment as part of the condition being
tested is a fairly common idiom.
The getline() Helper
The for continuation condition
in getLine is rather complex.
(Note that the for loop has an empty body; the entire
action occurs in the for statement itself.)
The condition part of the for tests for 3 situations.
- We have filled up s[].
- We get to the end of the input.
- We find an end-of-line
Perhaps it would be clearer if the test was simply
i<lim-1 and the rest was done with if-break
statments inside the loop.
A Subtlety in The Three Tests
In C, if you write f(x)+g(y)+h(z) you have
no guarantee of the order the functions will be invoked.
However, the && and || operators do
guarantee left-to-right ordering to enforce short-circuit
condition evaluation.
The copy() Helper
The copy() function is declared and defined
to return void.
- This means that it does not return a value.
- Similarly, a function taking no arguments should be declared and
defined to have a void argument list.
Leaving the argument list blank (i.e., writing fun_name())
actually means that you are not specifying the argument signature.
This weird rule is for compatibility with older versions of C that
played a little fast and loose with such issues.
Homework: Simplify the for condition
in getline() as just indicated.
1.10 External Variables and Scope
Solving Quadratic Equations
#include <stdio.h>
#include <math.h>
#define A +1.0 // should read
#define B -3.0 // A,B,C
#define C +2.0 // using scanf()
void solve (float a, float b, float c);
int main() {
solve(A,B,C);
return 0;
}
void solve (float a, float b, float c) {
float d;
d = b*b - 4*a*c;
if (d < 0)
printf("No real roots\n");
else if (d == 0)
printf("Double root is %f\n", -b/(2*a));
else
printf("Roots are %f and %f\n",
((-b)+sqrt(d))/(2*a),
((-b)-sqrt(d))/(2*a));
}
#include <stdio.h>
#include <math.h>
#define A +1.0 // main() should read
#define B -3.0 // A,B,C
#define C +2.0 // using scanf()
void solve(void);
float a, b, c; // definition
int main() {
extern float a, b, c; // declaration
a=A;
b=B;
c=C;
solve();
return 0;
}
void solve () {
extern float a, b, c; // declaration
float d;
d = b*b - 4*a*c;
if (d < 0)
printf("No real roots\n");
else if (d == 0)
printf("Double root is %f\n", -b/(2*a));
else
printf("Roots are %f and %f\n",
((-b)+sqrt(d))/(2*a),
((-b)-sqrt(d))/(2*a));
}
The two programs on the right find the real roots (no complex
numbers) of the quadratic equation
ax2+bx+c
They proceed by using the standard technique of first calculating
the discriminant
d = b2-4ac
These programs deal only with real roots, i.e., when
d≥0.
The programs themselves are not of much interest.
Indeed a Java version would be too easy
to be a midterm exam
question in 101.
Our interest is confined to the method in which the
coefficients a, b, and c are passed from
the main() function to the helper
routine solve().
Method 1 Arguments and Parameters
The first program calls a function solve()
passing it as arguments the three coeficients A,B,C.
There is little to say.
Method 1 is a simple program and uses nothing new.
Method 2 External (a.k.a. Global) Variables
The second program communicates with solve
using external variables rather than arguments/parameters.
- Note the single definition, of
a, b, and c.
This definition is before and hence outside any
function.
The definition causes space to be set aside for these variables
and is visible inside main() and solve().
- Also note the multiple declarations, one inside each
function.
They include the keyword extern and indicate that a
definition is provide elsewhere (externally).
- As noted in the preceding section, both main()
and solve() are defined in this file
and solve is also also declared.
- To repeat, in C you must
declare (or define) before use
.
If you define before using, you don't need to also declare.
But if you have recursion (f() calls g() and g() calls f()), you
can't have both definitions before the corresponding uses so you
need a declaration.
- Within a single .c file, the definition of a, b, c is
enough since it is before any function that uses the variables.
Normally the definitions come before all functions, as done in the
example, and hence the declarations are not needed.
- For larger programs consisting of many functions, the
functions are normally spread across multiple .c files.
In this case each file must contain a declaration or definition
prior to any use of the variable.
Exactly one of the .c files must contain a definition.
- Typically, the definition is directly in a single .c file and
the declaration is placed in a .h (header) file that is included
in all the .c files (so one .c has a declaration and a
definition).
Chapter 2 Types, Operators, and Expressions
2.1 Variable Names
Similar to Java: A variable name must begin with a letter and then
can use letters and numbers.
An underscore is a letter, but you shouldn't begin a variable name
with one since that is conventionally reserved for library routines.
Keywords such as if, while, etc are reserved and
cannot be used as variable names.
2.2 Data Types and Sizes
C has very few primitive types.
- char: One byte in size; can hold a character.
C will coerce a char to an int if needed.
- int: The
natural
size of an integer on the host
machine.
- float: Single precision floating point.
- double: Double precision floating point.
There are qualifiers that can be added.
One pair is long/short, which are used with int.
Typically short int is abbreviated short and
long int is abbreviated long.
long must be at least as big as int, which must
be as least as big as short.
There is no short float, short double,
or long float.
The type long double specifies extended precision.
The qualifiers signed or unsigned can be applied to
char or any integer type.
They basically determined how the sign bit is interpreted.
An unsigned char uses all 8 bits for the integer value and
thus has a range of 0–255; whereas, a signed char has
an integer range of -128–127.
2.3 Constants
Integer Constants
A normal integer constant such as 123 is an int, unless it
is too big in which cast it is a long.
But there are other possibilities.
- 123 is an int
- 1234567 is an int if int's are 32-bits; it
is a long if long's are 32-bits and
int's are only 16.
- 123u is an unsigned int.
- 1223ul is an unsigned long.
- A character constant is written inside single quotes, e.g. '0'.
These constants have an integer value.
For '0' the value happens to be 48.
Some single characters are
written as two characters.
For example '\0' is the ascii null character, which is used to
terminate C strings.
Its integer value is 0.
Also important are '\n' and '\t'.
There are others.
String Constants
Although there are no string variables, there are string constants,
written as zero or more characters surrounded by double quotes.
A null character '\0' is automatically appended.
- 'x' is a single character; 'x'+1 is a valid integer expression.
- "x" contains two characters, 'x' followed by '\0'.
It is a string constant, not an integer.
- "xy" "yz" is combined (at compile time) into "xyyz".
This is called concatenation.
- Note that we concatenated two strings each with 3 characters and
get one string with 5 character.
The null ending the first string is not in the concatenation
(otherwise it would end the concatenated string).
- "" is the empty string consisting just of '\0'.
- strlen() returns the length of a string, excluding the
terminating '\0'.
Enum Constants
Alternative method of assigning integer values to symbolic names.
enum Boolean {false, true}; // false is zero, true is 1
enum Month {Jan=1, Feb, Mar, Apr, May, Jun, Jul, Aug, Sep, Oct, Nov, Dec};
2.4 Declarations
Perhaps they should be called definitions since space is allocated.
Similar to Java for scalars.
int x, y;
char c;
double q1, q2;
(Stack allocated) arrays are simple since the entire array is
allocated not just a reference (no new/malloc required).
int x[10];
Initializations may be given.
int x=5, y[2]={44,6}; z[]={1,2,3};
char str[]="hello, world\n";
The qualifier const makes the variable read only so it
must be initialized in the declaration.
2.5 Arithmetic Operators
Mostly the same as java.
Please do not call % the mod operator, unless you
know that the operands are positive.
2.6 Relational and Logical Operators
Again very little difference from Java.
Please remember that && and || are required to be
short-circuit operators.
That is, they evaluate the right operand only if needed.
2.7 Type Conversion
There are two kinds of conversions: automatic conversion,
called coercion, and explicit conversions.
Automatic Conversions
C coerces narrow
arithmetic types to wide ones.
{char, short} → int → long
float → double → long double
long → float // precision can be lost
int atoi(char s[]) {
int i, n=0;
for (i=0; s[i]>='0' && s[i]<='9'; i++)
n = 10*n + (s[i]-'0'); // assumes ascii
return n;
}
The program on the right (ascii to integer) converts a character
string representing an integer to the integral value.
- This works only for ascii (or some other system where the
character form of the digits are consecutive and in the correct
order).
- Stops at first non digit.
For example, it will stop at the terminating '\0'.
Unsigned coercions are more complicated; you can read about them in
the book.
Explicit Casts
The syntax
(type-name) expression
converts the value to the type specified.
Note that e.g., (double) x converts the value
of x; it does not change x
itself.
Homework: 2-3.
Write the function htoi(s), which converts a string of
hexadecimal digits (including an option 0x or 0X) into its
equivalent integer value.
The allowable digits are 0 through 9, a through f, and A through
F.
2.8 Increment and Decrement Operators
The same as Java.
Remember that x++ or ++x are not the same as
x=x+1 because, with the operators, x is evaluated
only once, which becomes important when x is itself an
expression with side effects.
x[i++]++ // increments some (which?) element of an array
x[i++] = x[i++]+1 // puts incremented value in ANOTHER slot
Homework: 2-4.
Write an alternate version of squeeze(s1,s2) that deltets
ecah character that mataches any character is the string
s2.
2.9 Bitwise Operators
The same as Java
- & bit wise AND
- | bitwise OR
- ^ bitwise XOR (exclusive or)
- << left shift
- >> right shift
- ~ bitwise complement
2.10 Assignment Operators and Expressions
int bitcount (unsigned x) {
int b;
for (b=0; x!=0; x>>= 1)
if (x&01) // octal (not needed)
b++;
return b;
}
The same as Java:
+= -= *= /= %= <<= >>= &= ^= |=
The program on the right counts how many bits of its argument are 1.
Right shifting the unisigned x causes it to be
zero-filled.
Anding with a 1, gives the LOB (low order bit).
Writing 01 indicates an octal constant (any integer beginning with
0; similarly starting with 0x indicates hexadecimal).
Both are convenient for specifying specific bits (because both 8 and
16 are powers of 2).
Since the constant in this case has value 1, the 0 has no
effect.
Homework: 2-10.
Rewrite the function lower(), which converts upper case
letters to lower case with a conditional expression instead
of if-else.
2.11 Conditional Expressions
printf("You enrolled in %d course\s.\n", n, (n==1) ? "" : "s");
The same as Java:
Precedence and Associativity of C Operators
| Operators | Associativity |
|---|
| |
| () [] -> . | left to right |
| ! ~ ++ -- + - * & (type) sizeof |
right to left |
| * / % | left to right |
| + - | left to right |
| << >> | left to right |
| < <= > >= | left to right |
| == != | left to right |
| & | left to right |
| ^ | left to right |
| | | left to right |
| && | left to right |
| || | left to right |
| ?: | right to left |
| = += -= *= /= %= &= ^= |= <<= >>= |
right to left |
| , | left to right |
2.12 Precedence and Order of Evaluation
The table on the right is copied (hopefully correctly) from the
book.
It includes all operators, even those we haven't learned yet.
I certainly don't expect you to memorize the table.
Indeed one of the reasons I typed it in was to have an online
reference I could refer to since I do not know all the
precedences.
Homework: Check the table above for typos and
report any on the mailing list.
Not everything is specified.
For example if a function takes two arguments, the order in which
the arguments are evaluated is not specified.
Also the order in which operands of a binary operator like + are
evaluated is not specified.
So f() could be evaluated before or after g() in
the expression f()+g().
This becomes important if, for example, f() alters a global
variable that g() reads.
Start Lecture #3
#include <stdio.h>
void main (void) {
int x=3, y;
y = + + + + + x;
y = - + - + + - x;
y = - ++x;
y = ++ -x;
y = ++ x ++;
y = ++ ++ x;
}
Question: Which of the expressions on the right are
illegal?
Answer: The last three.
They apply ++ to values not variables (i.e, to r-values not
l-values).
I mention this because at the end of last time there was some
discussion about ++ ++ and ++++.
The distinction between l-values and r-values will become very
relevant when we discuss pointers.
Since pointers have presented difficulties for students in the
past, I use every opportunity to give ways of looking at the
problem.
Since ++ does an assignment (as well as an addition) it
needs a place to put the result, i.e., an l-value.
Chapter 3: Control Flow
3.1 Statements and Blocks
int t[]={1,2};
int main() {
22;
return 0;
}
C is an expression language; so 22
and
x=33
have values.
One simple statement is an expression followed by a semicolon;
For example, the program on the right is legal.
As in Java, a group of statements can be enclosed in braces to form
a compound statement or block.
We will have more to say about blocks later in the course.
3.2 If-Else
Same as Java.
3.3 Else-IF
Same as Java.
3.4 Switch
Same as Java.
3.5 Loops—While and For
#include <ctype.h>
int atoi(char s[]) {
int i, n, sign;
for (i=0; isspace(s[i]); i++) ;
sign = (s[i]=='-') ? -1 : 1;
if (s[i]=='+' || s[i]=='-')
i++;
for (n=0; isdigit(s[i]); i++)
n = 10*n + (s[i]-'0');
return sign * n;
}
Same as Java.
As we shall see, the loops in the book show the hand of a
master.
The program on the right (ascii to integer) illustrates several
points.
- The C library contains a number of string/character routines.
In this program two simple ones are used.
- The first for loop skips over leading spaces.
The loop has an empty body; this is not strange.
The
work
is done in the termination test.
- The conditional expression is used to determine the sign.
- The program depends on the ascii property that the digits are
consecutive and in numerical order.
The Comma Operator
for (i=0, j=0; i+j<n; i++,j+=3)
printf ("i=%d and j=%d\n", i, j);
If two expressions are separated by a comma, they are evaluated
left to right and the final value is the value of the one on the
right.
This operator often proves convenient in for statements
when two variables are to be incremented.
3.6 Loops—Do-While
Same as Java.
3.7 Break and Continue
Same as Java.
3.8 Goto and Labels
The syntax is
goto label;
for (...) {
for (...) {
while (...) {
if (...) goto out;
}
}
}
out: printf("Left 3 loops\n");
The label has the form of a variable name.
A label followed by a colon can be attached to any statement in the
same function as the goto.
The goto transfers control to that statement.
Note that a break in C (or Java) only leaves one level of
looping so would not suffice for the example on the right.
The goto statement was deliberately omitted from Java.
Poor use of goto can result in code that is hard to
understand and hence goto is rarely used in modern
practice.
The goto statement was much more commonly used in the
past.
Homework: Write a C
function escape(char s[], char t[]) that converts the
characters newline and tab into two character sequences \n
and \t as it copies the string t to the
string s.
Use the C switch statement.
Also write the reverse function unescape(char s[], char
t[]).
Chapter 4 Functions and Program Structure
4.1 Basics of Functions
Very Simplified Unix grep
The Unix utility grep (Global Regular Expression Print) prints all
occurrences of a given string (or more generally a regular
expression) from standard input.
A very simplified version is on the right.
The basic program is
while there is another line
if the line contains the string
print the line
Getting a line and seeing if there is more is getline();
a slightly revised version is on the right.
Note that a length of 0 means EOF was reached; an "empty" line still
has a newline char '\n' and hence has length 1.
Printing the line is printf().
#include <stdio.h>
#define MAXLINE 100
int getline(char line[], int max);
int strindex(char source[], char searchfor[]);
char pattern[]="x y"; // "should" be input
main() {
char line[MAXLINE];
int found=0;
while (getline(line,MAXLINE) > 0)
if (strindex(line, pattern) >= 0) {
printf("%s", line);
found++;
}
return found;
}
int getline(char s[], int lim) {
int c, i;
i = 0;
while (--lim>0 && (c=getchar())!=EOF && c!='\n')
s[i++] = c;
if (c == '\n')
s[i++] = c;
s[i] = '\0';
return i;
}
int strindex(char s[], char t[]) {
int i, j, k;
for(i=0; s[i]!='\0'; i++) {
for (j=i,k=0; t[k]!='\0' && s[j]==t[k]; j++,k++) ;
if (k>0 && t[k]=='\0')
return i;
}
return -1;
}
Checking to see if the string is present is the new code.
The choice made was to define a function strindex() that is
given two strings s and t and returns the position
(the index in the array) in s where t occurs.
strindex() returns -1 if t does not occur
in s.
The program is on the right; some comments follow.
- The string to look for is hardwired into the program in the
variable pattern.
We do this to avoid including a routine to read a string.
- If you think of found as a Boolean, you would expect
to see found=1; and not found++;
Actually, found counts the number of occurrences
of pattern in the input.
- Note the declarations of getline()
and strindex.
In particular see how their parameters are declared
C-style
, i.e., the code specifies you do to each parameter
in order to get a char or int.
These are not definitions of getline()
and strindex().
They include only the header information and not the body.
The declarations describe only how to use the functions, not what
they do.
- The while inside getline() is quite nice and
replaces a for in the previous version that looked like
a while in disguise.
- Note that the assignment to c is guaranteed to be done
before c is used in the comparison.
- The strindex outer for loops of where you
start in s; the inner for loops over matching
successive characters.
- The inner for uses the comma operator to initialize and
increment two variables.
Cute, but I believe j is always i+k so this usage is not
needed.
Form of a Function Definition
Note that a function definition is of the form
return-type function-name(parameters)
{
declaratons and statements
}
The default return type is int, but I recommend not
utilizing this fact and instead always declaring the return
type.
The return statement is like Java.
4.2 Functions Returning Non-integers
The book correctly gives all the defaults and explains why they are
what they are (compatibility with previous versions of C).
I find it much simpler to always
- Use no defaults when defining a function.
- If it returns int say so even though that is the
default.
- If it has no parameters, write void as the
parameter list.
- Declare all functions that are used in a file.
Have these declarations early, before any function
definitions.
4.3 External Variables
A C program consists of external objects, which are either
variables or functions.
External vs. Internal
Variables and functions defined outside any function are called
external.
Variables defined inside a function are
called internal.
Functions defined inside another function would also be
called internal; however standard C does not have internal
functions.
That is, you cannot in C define a function inside another function.
In this sense C is not a fully block-structured language
(see block structure
below).
Defining External Variables
As stated, a variable defined outside functions is external.
All subsequent functions in that file will see the definition
(unless it is overridden by an internal definition).
These can be used, instead of parameters/arguments to pass
information between functions.
It is sometimes convenient to not have to repeat a long list of
arguments common to several functions, but using external variables
has problems as well:
It makes the exact information flow harder to deduce when reading
the program.
When we solved quadratic equations in section 1.10 our second
method used external variables.
4.4 Scope Rules
The scope rules give the visibility of names in a program.
In C the scope rules are fairly simple.
Internal Names (Variables)
Since C does not have internal functions, all internal names are
variables.
Internal variables can be automatic or static.
We have seen only automatic internal variables, and this section
will discuss only them.
Static internal variables are discussed in section 4.6
below.
An automatic variable defined in a function is visible from the
definition until the end of the function (but see
block structure, below).
If the same variable name is defined internal to two functions, the
variables are unrelated.
Parameters of a function are the same as local variables in this
respect.
External Names
int main(...) {...}
int value;
float joe(...) {...}
float sam;
int bob(...) {...}
An external name (function or variable) is visible from the point
of its definition (or declaration as we shall see below) until the
end of that file.
In the example on the right main() cannot call
joe() or bob(), and cannot use either
value or sam.
bob() can call joe(), but not vice versa.
Definitions and Declarations
There can be only one definition of an external name in
the entire program (even if the program includes many files).
However, there can be multiple declarations of the same
name.
A declaration describes a variable (gives its type) but does not
allocate space for it.
A definition both describes the variable and allocates space for
it.
extern int X;
extern double z[];
extern float f(double y);
Thus we can put declarations of a variable X, an array
z[], and a function f() at the top of every file
and then X and z are visible in every function in
the entire program.
Declarations of z[] do not give its size since space is not
allocated; the size is specified in the definition.
If declarations of joe() and bob() were added
at the top of the previous example, then main() would be
able to call them.
If an external variable is to be initialized, the initialization
must be put with the definition, not with a declaration.
4.5 Header Files
#include <stdio.h>
double f(double x);
int main() {
float y;
int x = 10;
printf("x is %f\n", (double)x);
printf("f(x) is %f\n", f(x));
return 0;
}
double f(double x) {
return x;
}
x is 0.000000
f(x) is 10.000000
The code on the right shows how valuable having the types declared
can be.
The function f() is the identity function.
However, main() knows that f() takes a
double so the system automatically converts x to a
double.
Without the explicit cast (double) in the
first printf(), the compiler would give a warning about a
type mismatch, but the program would still work.
I prefer to put in the casts and not have to worry about the
warnings.
It would be awkward to have to change every file in a big
programming project when a new function was added or had a change of
signature (types of arguments and return value).
What is done instead is that all the declarations are included in a
header file.
For now assume the entire program is in one directory.
Create a file with a name like functions.h containing the
declarations of all the functions.
Then early in every .c file write the line
#include "functions.h"
Note the quotes not angle brackets, which indicates that functions.h
is located in the current directory, rather than in the standard
place
that is used for <>.
4.6: Static Variables
The adjective static has very different meanings when
applied to internal and external variables.
- For external variables, static
decreases the visibility.
- For internal variables, static
increases the lifetime.
int main(...){...}
static int b16;
void sam(...){...}
double beth(...){...}
If an external variable is defined with the static
attribute, its visibility is limited to the current file.
In the example on the right b16 is naturally visible in
sam() and beth(), but not main().
The addition of static means that if another file
has a definition or declaration of b16, with or without
static, the two b16 variables are not related.
If an internal variable is declared static, its
lifetime is the entire execution of the program.
This means that if the function containing the variable is called
twice, the value of the variable at the start of the second call is
the final value of that variable at the end of the first call.
Static Functions
As we know there are no internal functions in standard C.
If an (external) function is defined to be static, its
visibility is limited to the current file (as for static external
variables).
4.7 Register Variables
Ignore this section.
Register variables were useful when compilers were primitive.
Today, compilers can generally decide, better than
programmers, which variables should be put in register.
Start Lecture #4
4.8: Block Structure
Standard C does not have internal functions, that is you cannot in
C define a function inside another function.
In this sense C is not a fully block-structured language.
Of course C does have internal variables; we have used them in
almost every example.
That is, most functions we have written (and will write) have
variables defined inside them.
#include <stdio.h>
int main(void) {
int x = 5;
printf ("The value of outer x is %d\n", x);
{
int x = 10;
printf ("The value of inner x is %d\n", x);
}
printf ("The value of the outer x is %d\n", x);
return 0;
}
The value of outer x is 5.
The value of inner x is 10.
The value of outer x is 5.
Also C does have block structure with respect to variables.
This means that inside a block (remember that a block is a bunch of
statements surrounded by {}) you can define a new variable
with the same name as the old one.
These two variables are unrelated.
The lifetime of the new variable is just the lifetime of the
execution of the block in which it is defined.
For example, the program on the right produces the output shown.
Remark: The gcc compiler for C does permit one to
define a function inside another function.
These are called nested functions.
Some consider this gcc extension to be evil.
Homework: Write a C funcion
int odd (int x) that returns 1 if x is odd
and returns 0 if x is even.
Can you do it without an if statement?
4.9 Initialization
Default Initialization
Static and external variables are, by default, initialized to zero.
Automatic, internal variables (the only kind left) are
not initialized by default.
Initializing Scalar Variables
As in Java, you can write int X=5-2;.
For external or static scalars, that is all you can do.
int x=4;
int y=x-1;
For automatic, internal scalars the initialization expression can
involve previously defined values as shown on the right (even
function calls are permitted).
Initializing Arrays
int BB[8] = {4,9,2}
int AA[] = {3,5,12,7};
char str[] = "hello";
char str[] = {'h','e','l','l','o','\0'}
You can initialize an array by giving a list of initializers as
shown on the right.
- The last 5 elements of BB are uninitialized.
- The size of AA is automatically 4.
- The last two are the same; the size of str is 6.
4.10 Recursion
The same as Java.
4.11 The C Preprocessor
Normally, before the compiler proper sees your program, a utility
called the C preprocessor is invoked to include files and perform
macro substitutions.
4.11.1 File Inclusion
#include <filename>
#include "filename"
We have already discuss both forms of file inclusion.
In both cases the file mentioned is textually inserted at the point
of inclusion.
The difference between the two is that the first form looks for
filename in a system-defined standard place
;
whereas, the second form first looks in the current directory.
4.11.2 Macro Substitution
#define MAXLINE 20
#define MULT(A, B) ((A) * (B))
#define MAX(X, Y) ((X) > (Y)) ? (X) : (Y)
#undef getchar
We have already used examples of macro substitution similar to the
first line on the right.
The second line, which illustrates a macro with arguments is more
interesting.
Without all the parentheses on the RHS, the macro would be legal,
but would (sometimes) give the wrong answers.
Question: Why?
Answer: Consider MULT(x+4, y+3)
Note that macro substitution is not the same as a
function call (with standard call-by-value or call-by-reference
semantics).
Even with all the parentheses in the third example you can get into
trouble since MAX(x++,5) can increment x twice.
If you know call-by-name from algol 60 fame, this will seem
familiar.
We probably will not use the fourth form.
It is used to un-define a macro from a library so that you can write
another version.
There is some fancy stuff involving # in the RHS of the macro
definition.
See the book for details; I do not intend to use it.
#if integer-expr
...
#elif integer-expr
...
#else
...
#endif
4.11.3 Conditional Inclusion
The C-preprocessor has a very limited set of control flow items.
On the right we see how the C
if (cond1)
...
else if (cond2)
...
else
..
end if
construct is written.
The individual conditions are simple integer expressions consisting
of integers, some basic operators and little else.
Perhaps the most useful additions are the preprocessor
function defined(name), which evaluates to 1 (true)
if name has been #define'd, and the ! operator,
which converts true to false and vice versa.
#if !defined(HEADER22)
#define HEADER22
// The contents of header22.h
// goes here
#endif
We can use defined(name) as shown on the right to ensure
that a header file, in this case header22.h, is included
only once.
Question: How could a header file be included
twice unless a programmer foolishly wrote the same #include
twice?
Answer: One possibility is that a user might
include two systems headers h1.h and h2.h each of
which includes h3.h.
Two other directives #ifdef and #ifndef test
whether a name has been defined.
Thus the first line of the previous example could have been written
ifndef HEADER22.
#if SYSTEM == MACOS
#define HDR "macos.h"
#elsif SYSTEM == WINDOWS
#define HDR "windows.h"
#elsif SYSTEM == LINUX
#define HDR "linux.h"
#else
#define HDR "empty.h"
#define MSG No header found for System
#endif
#include HDR
On the right we see a slightly longer example of the use of
preprocessor directives.
Assume that the name SYSTEM has been set to the name of the system
on which the current program is to be run (not
compiled).
Assume also that individual header files have been written for
macos, windows, and linux systems.
Then the code shown will include the appropriate header file.
In addition, if the SYSTEM is not one of the three on which the
program is designed to be run, the code to the right will define
MSG, a diagnostic that could be printed.
Note: The quotes used in the
various #defines for HDR are not required
by #define, but instead are needed by the final
#include.
Chapter 5 Pointers and Arrays
public class X {
int a;
public static void main(String args[]) {
int i1;
int i2;
i1 = 1;
i2 = i1;
i1 = 3;
System.out.println("i2 is " + i2);
X x1 = new X();
X x2 = new X();
x1.a = 1;
x2 = x1; // NOT x2.a = x1.a
x1.a = 3;
System.out.println("x2.a is " + x2.a);
}
}
Much of the material on pointers has no explicit analogue in Java;
it is there kept under the covers.
If in Java you have an Object obj, then obj is
actually what C would call a pointer.
The technical term is that Java has reference semantics for all
objects.
In C this will all be quite explicit
To give a Java example, look at the snippet on the right.
The first part works with integers.
We define 2 integer variables; initialize the first; set the second
to the first; change the first; and print the second.
Naturally, the second has the initial value of the first, namely
1.
The second part deals with X, a trivial class, whose
objects have just one data component, an integer.
We mimic the above algorithm.
We define two X's and work with their integer field
(a).
We then proceed as above: initialize the first integer field; set
the second to the first; change the first; and print the second.
The result is different from the above!
In this case the second has the altered value of the first, namely
3.
The key difference between the two parts is that (in Java) simple
scalars like i1 have value semantics; whereas objects
like x1 have reference semantics.
But enough Java, we are interested in C.
5.1 Pointers and Addresses
You will learn in 202, that the OS finagles memory in ways that
would make Bernie Madoff smile.
But, in large part thanks to those shenanigans, user programs can
have a simple view of memory.
For us C programmers, memory is just a large array of consecutively
numbered addresses.
The machine model we will use in this course is that the
fundamental unit of addressing is a byte and a character
(a char) exactly fits in a byte.
Other types like short, int, double,
float, long normally take more than one byte, but
always a consecutive range of bytes.
l-values and r-values
One consequence of our memory model is that associated with
int z=5; are two numbers.
The first number is the address of the location in which z
is stored.
The second number is the value stored in that location; in this case
that value is 5.
The first number, the address, is often called the l-value; the
second number, the contents, is often called the r-value.
Why l and r?
Consider z = z + 1;
To evaluate the right hand side
(RHS) we need to add 5 to 1.
In particular, we need the value contained in the memory location
assigned to z, i.e., we need 5.
Since this value is what is needed to evaluate the RHS of an
assignment statement it is called an r-value.
Then we compute 6=5+1.
Where should we put the 6?
We look at the LHS and see that we put the 6 into z; that
is, into the memory location assigned to z.
Since it is the location that is needed when evaluating a LHS, the
address is called an l-value.
The Unary Operators & and *
As we have just seen, when a variable appears on the LHS, its
l-value or address is used.
What if we want the address of a variable that appears on the RHS;
how do we get it?
In a language like Java the answer is simple; we don't.
In C we use the unary operator & and
write p=&x; to assign the address of x
to p.
After executing this statement we say that p points to
x or p is a pointer to x.
That is, after execution, the r-value of p is the l-value
of x.
int x=3;
int *p = &x;
Look at the declarations on the right.
x is familiar; it is an integer variable initially
containing 3.
Specifically, the r-value of x is 3.
What about the l-value of x, i.e., the location in which
the 3 is stored?
It is not an int; it is an address into which
an int can be stored.
Alternately said it is pointer to an int.
The unary prefix operator & produces the address of a
variable, i.e., &x gives the l-value of x, i.e. it
gives a pointer to x.
The unary operator * does the reverse action.
When * is applied to a pointer, it gives the value of the
object (object is used in the English not OO sense) pointed to.
The * operator is called the dereferencing or
indirection operator.
Now look at the declaration of p, which says
that p is the kind of thing that when you apply *
to it you get an int, i.e., p is a pointer to an
int.
That is why we can initialize p to &x.
// part one of three
int x=1;
int y=2;
int z[10];
int *ip;
int *jp;
ip = &x;
Consider the code sequence on the right (part one).
The first 3 lines we have seen many times before; the next three are
new.
Recall that in a C declaration, all the doodads around a variable
name tell you what you must do the variable to get the base type at
the beginning of the line.
Thus the fourth line says that if you dereference ip you
get an integer.
Common parlance is to call ip an integer pointer (which is
why we named it ip).
Similarly, jp is another integer pointer.
At this point both ip and jp are uninitialized.
The last line sets ip to the address, of x.
Note that the types match, both ip and &x are
pointers to an int.
// part two of three
y = *ip; // L1
*ip = 0; // L2
ip = &z[0]; // L3
*ip = 0; // L4
jp = ip; // L5
*jp = 1; // L6
In part two, L1 sets y=1 as follows: ip now points
to x, * does the dereference so *ip is x.
Since we are evaluating the RHS, we take the contents not the
address of x and get 1.
L2 sets x=0;.
The RHS is clearly 0.
Where do we put this zero?
Look at the LHS:
ip currently points to x, * does a dereference
so *ip is x.
Since we are on the LHS, we take the address and not the contents of
x and hence we put 0 into x.
L3 changes ip; it now points to z[0].
So L4 sets z[0]=0;
Pointers can be used without the deferencing operator.
L5 sets jp to ip.
Since ip currently points to z[0], jp
does as well.
Hence L6 sets z[0]=1;
// part three of three
ip = &x; // L1
*ip = *ip + 10; // L2
y = *ip + 1; // L3
*ip += 1; // L4
++*ip; // L5
(*ip)++; // L6
*ip++; // L7
Part three begins by re-establishing ip as a pointer
to x so L2 increments x by 10 and the L3
sets y=x+1;.
L4 increments x by 1 as does L5
(because the unary operators ++ and * are right
associative).
L6 also increments x, but L7 does not.
By right associativity we see that the increment precedes the
dereference, but the full story awaits section 5.4
below.
5.2 Pointers and Function Arguments
void bad_swap(int x, int y) {
int temp;
temp = x;
x = y;
y = temp;
}
The program on the right is what a novice programer just learning C
(or Java) would write.
It is supposed to swap the two arguments it is called with, but
fails due to call by value semantics for function calls in C.
What happens is, when another function calls swap(a,b)
the values of the arguments a
and b are transmitted to the parameters x
and y and then swap() interchanges the values
in x and y.
But when swap() returns, the final values
in x and y are NOT transmitted
back to the arguments: a and b are unchanged.
But programs that change their arguments are useful!
Actually, what is useful is to be able to change the value of
variables used in the caller (even if some other
variables
become the arguments) and that distinction is the key.
Just because we want to swap the values of a
and b, doesn't mean the arguments have to be literally
a and b.
void swap(int *px, int *py) {
int temp;
temp = *px;
*px = *py;
*py = temp;
}
The program on the right has two parameters px and
py each of which is a pointer to an integer (*px
and *py are the integers).
Since C is a call-by-value language, changes to the parameters,
which are the pointers px and py
would not result in changes to the corresponding arguments.
But the program on the right doesn't change the pointers at all,
instead it changes the values they point to.
Since the parameters are pointers to integers, so must be the
arguments.
A typical call to this function would
be swap(&A,&B).
Understanding how this call results in A receiving the
value previously in B and B receiving the value
previously in A is crucial.
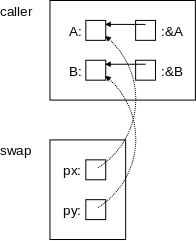
On the right is a pictorial explanation.
A has a certain address.
&A equals
that address (more precisely the
r-value of &A = the l-value of A).
Similarly for B and &B.
These are shown by the solid arrows in the diagram.
The call swap(&A,&B) copies (the r-value
of) &A into (the r-value of) the first parameter, which
is px.
Similarly for &B and the second parameter, py.
These are shown by the dotted arrows.
Thus the value of px is the address of A, which is
indicated by the arrow.
Again, to be pedantic, the r-value of px equals the r-value
of &A, which equals the l-value of A.
Similarly for B and py.
Swapping px with py would change the dotted
arrows, but would not change anything in the caller.
However, we don't swap px with py, instead we
swap *px with *py.
That is we dereference the pointers and swap the things pointed to!
This subtlety is the key to understanding the effect of many C
functions.
It is crucial.
Homework: Write rotate3(A,B,C) that sets
A to the old value of B, sets B to old
C, and C to old A.
Homework: Write plusminus(x,y) that sets
x to old x + old y and sets y
to old x - old y.
Start Lecture #5
A Larger Example—getch(), ungetch(), and getint()
The program pair getch() and ungetch() generalize
getchar() by supporting the notion of unreading a
character, i.e., having the effect of pushing back several already
read characters.
Note that ungetch() is careful not to exceed the size of
the buffer used to stored the pushed back characters.
Remember that C does not generate run-time checks that you are not
accessing an array beyond its bound.
Recall I mentioned that in the past an number of break ins were
caused by the lack of such checks in library programs like this.
#include <stdio.h>
#define BUFSIZE 100
char buf[BUFSIZE];
int bufp = 0;
int getch(void);
void ungetch(int);
int getint(int *pn);
int getch(void) {
return (bufp>0) ? buf[--bufp] : getchar();
}
void ungetch(int c) {
if (bufp >= BUFSIZE)
printf("ungetch: too many chars\n");
else
buf[bufp++] = c;
}
#include <stdio.h>
#include <ctype.h>
int getint(int *pn) {
int c, sign;
while (isspace(c=getch())) ;
if (!isdigit(c) && c!=EOF && c!='+' && c!='-') {
ungetch(c);
return 0;
}
sign = (c=='-') ? -1 : 1;
if (c=='+' || c=='-')
c = getch();
for (*pn = 0; isdigit(c); c=getch())
*pn = 10 * *pn + (c-'0');
*pn *= sign;
if (c != EOF)
ungetch(c);
return c;
}
Also shown is getint(), which reads an integer from
standard input (stdin) using getch()
and ungetch().
getint() returns the integer read via a parameter.
As we have seen the new value of a parameter is not passed back to
the caller.
Hence, getint() uses the pointer/address business we just
saw with swap().
Specifically any change made to pn by getint()
would be invisible to the caller.
However, getint() changes only *pn; a change the
caller does see.
The value returned by the function itself gives the status, zero
means the next characters do not form an integer, EOF (which is
negative) means we are at the end of file, positive means an integer
has been found.
Briefly the program works as follows.
Skip blanks
Check for legality
Determine sign
Evaluate number
one digit at a time
Although short, the program is not trivial.
Indeed, there some details to note.
- A + or - followed by a non digit is treated as zero.
See homework 5.1 below.
- Care is needed to understand the result when the file being read
does not end in a newline.
For example, if getint() is invoked on a file containing
just three characters
123
(no newline at the end), it will
set *pn=123 as desired but will return EOF.
I suspect that most programs using getint() will, in this
case, ignore *pn and just treat it as EOF.
- If this, and other, examples from the book seem clever and
subtle, remember that Richie, one of the authors, invented C.
If, in real life, you were asked to produce a getint()
function you would have three tasks.
- Write, in precise English, a detailed specification of what is
to happen in all cases.
- Write a C program implementing this specification.
- Get the C syntax right.
The third is clearly the easiest task.
I suspect that the first is the hardest.
Homework: 5-1.
As written, getint() treats a + or - not
followed by a digit as a valid representation of zero.
Fix it to push such a character back on the input.
5.3 Pointers and Arrays
In C pointers and arrays are closely related.
As the book says
Any operation that can be achieved by array subscripting can also be
done with pointers.
The authors go on to say
The pointer version will in general be faster but, at least to the
uninitiated, somewhat harder to understand.
The second clause is doubtless correct; but perhaps not the first.
Remember that the 2e was written in 1988 (1e in 1978).
Compilers have improved considerably in the past 20+ years and, I
suspect, would turn out nearly as fast code for many of the array
versions.
The next few sections present some simple examples using
pointers.
A Tiny Example
int a[5], *pa;
pa = &a[0];
int x = *pa;
x = *(pa+1);
x = a[0];
x = *a;
int i;
x = a[i];
x = *(a+i);
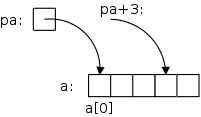
On the far right we see some code involving pointers and arrays.
After the first two lines are executed we get the diagram shown on
the near right.
pa is a pointer to the first element of the array
a.
pa+3 would be a pointer to the fourth element of the
array.
But note that pa+3 is not a container; you can't put
another pointer into pa+3 just like you can't put
another int into i+3.
The next line sets x (which is a container) equal to (the
r-value of) a[0]; the line after that
sets x=a[1].
Then we explicitly set x=a[0].
The line after that has the same effect!
That is because in C the value of array name equals the address of
its first element.
(The r-value of a = the r-value of &a[0] = the address
of a[0].)
Again note that a (i.e., &a[0]) is an expression, not a
variable, and hence is not a container.
Said yet another way a and pa have the same value
(r-value) but are not the same thing
!
Similarly, the next three lines each have the same effect, this
time for a general element of the array a[i].
An Subtle Difference Between Array Names and Pointers (one more time)
int a[5], *pa;
pa = &a[0];
pa = a;
a = pa; // illegal
&a[0] = pa; // illegal
Both pa and a are pointers to ints.
In particular a is defined to be &a[0].
Although pa and a have much in common,
there is an important difference:
pa is a variable, its value can be changed;
whereas &a[0] (and hence a) is not a variable.
In particular the last two lines on the right are illegal.
Another way to say this is that &a[0] is not an l-value.
This is similar to the legality of x=5;
versus the
illegality of 5=x;
Calculating the Length of a String: mystrlen()
The Program Itself
int mystrlen(char *s) {
int n;
for (n=0; *s!='\0'; s++,n++) ;
return n;
}
The code on the right illustrates how well the C
pointers, arrays, and strings mesh.
What a tiny program to find the length of an arbitrary string!
Note that the body of the for loop is null; all the work
is done in the for statement itself.
Calling mystrlen()
char str[50], *pc;
// calculate str and pc
mystrlen(pc);
mystrlen(str);
mystrlen("Hello, world.");
Note the various ways in which mystrlen() can be
called.
- The first call shown exactly matches the function declaration.
That is, both the argument (in the function call) and the
parameter (in the function definition) have the same type, a
pointer to a char.
Don't forget in a C declaration you
decorate
a variable
with enough stuff to obtain one of the primitive types.
- The second call matches as well, once we remember that an array
name has the same value as a pointer to the first value.
- Finally, the third is like the second since a string constant
is a character array.
One More Time: Value Versus Address (or r-value Versus l-value)
#include <stdio.h>
int x, *p;
int main () {
p = &x;
x = 12;
printf("p = %p\n", p);
printf("*p = %d\n", *p);
p++;
printf("p = %p\n", p);
printf("*p = %d\n", *p);
}
The example on the right illustrates well the difference between a
variable, in this case x, and its address &x.
The first value printed is the address of x.
This is not 12.
Instead, it is some (probably large) number that happens to be the
address of x.
Just as %d is used to print integers, %p is used
for pointers.
On my system the line printed was
p = 0x7fbcb9319040
Incrementing p does not
increment x.
Instead, the result is that p points to the next integer
after x.
In this program there is no further integer after x, so the
result is unpredictable.
I consider the program to be erroneous.
Specifically, the value of *p is now unpredictable.
On my system the value of p was 0x7fbcb9319040.
The value of *p was 0, but that can NOT be counted on.
If, instead of x, we had p point to A[7]
for some large double array A, then the last line
would have printed the value of A[8] and
the penultimate line would have printed the address
of A[8].
String Length with Arrays and Pointers
#include <stdio.h>
int mystrlen (char *s);
int main () {
char stg[] = "hello";
printf ("The string %s has %d characters\n",
stg, mystrlen(stg));
}
int mystrlen (char *s) {
int i = 0;
while (*s++ != '\0')
i++;
return i;
}
int mystrlen (char s[]) {
int i;
for (i = 0; s[i] != '\0'; i++) ;
return i;
}
On the right we show two versions of a string length function.
The first version uses array notation for the string; the second
uses pointer notation.
The main() program is identical in the two versions so is
shown only once.
Note how very close the two string length functions are.
This is another illustration of the similarity of arrays and
pointers in C.
Note the two declarations
int mystrlen (char *s);
int mystrlen (char s[]);
They are used 3 times in the code on the right.
In C these two declarations are equivalent.
Changing any or all of them to the other form does not change the
meaning of the program.
I realize an array does not at first seem the same as a pointer.
Remember that the array name itself is equal to a pointer to the
first element of the array.
Hence declaring
float a[5], *b;
results in a and b having the same type (pointer
to float).
But a has additionally been defined; that
is, space for 5 floats has been allocated.
Hence a[3] = 5; is legal.
b[3] = 5 is syntactically legal, but may abort at runtime,
unless b has previously be set to point to sufficient
space.
In the first version of mystrlen() we encounter a common C
idiom *s++.
First note that the precedence of the operators is such that
*s++ is the same as *(s++).
That is, we are moving (incrementing) the pointer and examining what
it used to point at.
We are not incrementing a part of the string.
Specifically, we are not executing (*s)++;
Simple Substitution
void changeltox (char *s) {
while (*s != '\0') {
if (*s == 'l')
*s = 'x';
s++;
}
}
The program on the right simply loops through the input string and
replaces each occurence of l with x.
The while loop and increment of s could have been
combined into a for loop.
This version is written in pointer style.
Homework:
Rewrite changeltox() to use array style and a for
loop.
String Copy
void mystrcpy (char *s, char *t) {
while ((*s++ = *t++) != '\0') ;
}
Check out the ONE-liner on the right.
Note especially the use of standard idioms for marching through
strings and for finding the end of the string.
Slick!
But scary, very scary!
Question: Why is it scary?
Answer: Because there is no length check.
If the character array s (or equivalently
the block of characters s points to) is smaller than the
character array t, then the copy will overwrite whatever
happens to be located right after the array s.
The lack of such length checks has permitted a number of security
breaches.
Using int *A vs int A[] as a Parameter
double f(int *a);
double f(int a[]);
The two lines on the right are equivalent, when used as a function
declaration (or, without the semicolon) as the head line of a
function definition).
The authors say they prefer the first.
For me it is not so clear cut.
In mystrlen() above I would indeed
prefer char *s as written since I think of a string as
a block with a pointer to the beginning.
double dotprod(double A[], double B[]);
However, if I were writing an inner product routine (a.k.a. dot
product), I would prefer the array form as on the right
since I think of dot product as operating on vectors.
But of course, more important that what I prefer or the authors
prefer, is the fact that they are equivalent in C.
Passing Part of an Array
#include <stdio.h>
void f(int *p);
int main() {
int A[20];
// initialize all of A
f(A+6);
return 0;
}
void f(int *p) {
printf("legal? %d\n", p[-2]);
printf("legal? %d\n", *(p-2));
}
In the code on the right, main() first declares an integer
array A[] of size 20 and initializes all its members (how
the initialization is done is not important).
Then main(), in a effort to protect the beginning
of A[], passes only part of the array to f().
Remembering that A+6 means (&A[0])+6, which is
&A[6], we see that f() receives a pointer to the
7th element of the array A.
The author of main() mistakenly believes
that A[0],..,A[5] are hidden from f().
Let's hope this author is not on the security team for the board of
elections.
Since C uses call by value, we know that f() cannot change
the value of the pointer A+6 in main().
But f() can use its copy of this pointer to reference or
change all the values of A, including those
before A[6].
On the right, f() successfully
references A[4].
It naturally would be illegal for f() to reference (or
worse change) p[-9].
5.4: Address Arithmetic
#include <stdio.h>
void main (void) {
int q[] = {11, 13, 15, 19};
int *p = q;
printf("*p = %d\n", *p);
printf("*p++ = %d\n", *p++);
printf("*p = %d\n", *p);
printf("*++p = %d\n", *++p);
printf("*p = %d\n", *p);
printf("++*p = %d\n", ++*p);
}
A crucially important point is that, given the declaration
int *p; the increment pa+=3 does not simply
add three to the address stored in pa.
Instead, it increments pa so that it points 3
integers further forward (since pa is a
pointer to an integer).
If pc is a pointer to a double, then
pc+3 increments pc so that it points 3
doubles forward.
To better understand pointers, arrays, ++, and *, let's go over the
code on the right line by line.
For reference the precedence table
is here.
The output produced is
*p = 11
*p++ = 11
*p = 13
*++p = 15
*p = 15
++*p = 16
A Simple Storage Allocator
#define ALLOCSIZE 15000
static char allocbuf[ALLOCSIZE];
static char *allocp = allocbuf;
char *alloc(int n) {
if (allocp+n ≤ allocbuf+ALLOCSIZE) {
allocp += n;
return allocp-n; // previous value
} else // not enough space
return 0;
}
void afree (char *p) {
if (p>=allocbuf && p<allocbuf+ALLOCSIZE)
allocp = p;
}
On the right is a primitive storage allocator and freer.
When alloc(n) is called, with an non-negative integer
argument n, it returns a pointer to a block of
n characters.
When afree(p) is called with the pointer returned
by alloc(), it resets the state of alloc()/afree()
to what it was before the call to alloc().
A very strong assumption is made that calls
to alloc()/afree() are made in a stack-like manner.
These routines would be useful for managing storage for C automatic,
local variables.
They are far from general.
The standard library routines malloc()/free() do not make
this assumption and as a result are
considerably more complicated.
Since pointers, not array positions are communicated to users
of alloc()/afree(), these users do not need to know
anything about the array, which is kept under the covers via
static.
Notes.
- The initialization of allocp is the same as setting
it to &allocbuf[0].
- Normally, the only reasonable initial values for a pointer are
zero or some expression involving the addresses of previously
declared objects.
- C guarantees that no valid pointer has value zero.
That is, &x is never zero.
Thus setting a pointer to zero is a way of saying it points to
no object
.
Although a literal 0 is permitted; most programmers
use NULL.
- Question: What happens if n<0?
Answer: The new allocation gets memory that is
part of a previous allocation.
Even worse if *very* negative; scary!
Start Lecture #6
Pointer Comparison
If pointers p and q point to elements of the same
array, then comparisons between the pointers
using <, <=, ==, !=, >,
and >= all work as expected.
If pointers p and q do not point to members of
the same array, the value returned by comparisons is undefined, with
one exception: p pointing to an element of an array and
q pointing to the first element past the array.
Any pointer can be compared to 0 via == and !=.
Normally, NULL is used, but an actual literal 0 is
permitted.
Pointer Subtraction
Again we need p and q pointing to elements of the
same array.
In that case, if p<=q, then p-q+1 equals the
number of elements from p to q (including the
elements pointed to by p and q).
Using the Allocator
These examples are interesting in their own right, beyond showing
how to use the allocator.
#include <stdio.h>
void changeltox(char *z);
void mystrcpy char *s, char *t);
char *alloc(int n);
int main() {
char stg[] = "hello";
char *stg2 = alloc(6);
mystrcpy(stg2, stg);
changeltox(stg);
printf ("String is now %s\n", stg);
printf ("String2 is now %s\n", stg2);
}
Making Changes in a New String
We have already written a
program changeltox() that changes one character to another
in a given string.
After initializing the string to "hello", the code on the right
first copies it (using mystrcpy(), a one liner presented
above) and then makes changes in the original.
Thus, at the end, we have two versions of the string: the before and
the after.
As expected the output is
String is now hexxo
String2 is now hello
So far, so good.
Let's try something fancier.
Mismatched Sizes and the Resulting Mess
Recall the danger warning given with the code for
mystrcpy(char *x, char *y): The code copies
all the characters in y (i.e., up to and including
'\0') to x ignoring the current length
of x.
Thus, if y is longer than the space allocated
for x, the copy will overwrite whatever happens to be
stored right after x.
#include <stdio.h>
void changeltox (char*);
void mystrcpy (char *s, char *t);
char *alloc(int n);
int main () {
char stg[] = "hello";
char *stg2 = alloc(2);
char *stg3 = alloc(6);
mystrcpy (stg2, stg);
printf ("String2 is now %s\n", stg2);
printf ("String3 is now %s\n", stg3);
mystrcpy (stg3, stg);
changeltox (stg);
printf ("The string is now %s\n", stg);
printf ("String2 is now %s\n", stg2);
printf ("String3 is now %s\n", stg3);
}
The example on the right illustrates the danger.
When the code on the right is compiled with the code for
changeltox(), mystrcpy(), and alloc(),
the following output occurs.
String2 is now hello
String3 is now llo
The string is now hexxo
String2 is now hehello
String3 is now hello
What happened?
The string in stg contains the 5 characters in the word
hello
plus the ascii null '\0' to end the string.
(The array stg has 6 elements so the string fits
perfectly.)
The major problem occurs with the first execution of
mystrcpy() because we are copying 6 characters into a
string that has room for only 2 characters (including the ascii
null).
This executes flawlessly
copying the 6 characters to an area
of size 6 starting where stg2 points.
These 6 locations include the 2 slots allocated to stg2 and
then the next four locations.
Normally it is very hard to tell what has been overwritten, and the
resulting bugs can be very difficult to find and fix.
In this situation it is not hard to see what was overwritten since
we know how alloc() works.
The excess
6-2=4 characters are written into the first 4
slots of stg3.
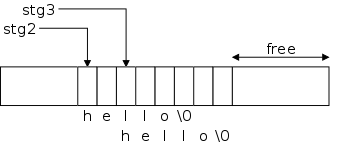
When we print stg2 the first time we see no problem!
A string pointer just tells where the string starts, it continues up
to the ascii null.
So stg2 does have all of hello
(and the terminating
null).
Since stg3 points 2 characters after stg2, the
string stg3 is just the substring of stg2 starting
at the third character.
The second mystrcpy copies the six(!) characters in the
string hello
to the 6 bytes starting at the location pointed
to by stg3.
Since the string stg2 includes the location pointed to by
stg3, both stg2 and stg3 are changed.
The changeltox() execution works as expected.
5.5: Character Pointers and Functions
As we know C does not have string variables, but does have string
constants.
This arrangement sometimes requires care to avoid errors.
char amsg[]="hello"; vs char *msgp="hello";
char amsg[] = "hello";
char *msgp = "hello";
int main () {...}
Let's see if we can understand the following rules, which can
appear strange at first glance.
- amsg (a character pointer) cannot be changed
(amsg is an r-value not an l-value).
However, both amsg[1] (an 'e')
and *(amsg+1) (the same 'e') can be changed.
- msgp (a character pointer) can be changed, but both
*(msgp+2) (an 'l') and msgp[2] (the
same 'l') cannot be changed.
Perhaps the following will help.
- amsg is defined to be &amsg[0], which is
an expression not a variable; it is not a container.
So it is only an r-value, not an l-value.
But amsg does point to a block of 6 containers.
Hence de-referencing amsg (or amsg+1) does yield
a container.
Remember that *(amsg+1) is just amsg[1].
- msgp is a variable.
Hence msgp is an l-value (a container) and can be
changed.
However it points to a bunch of character constants none of which
are variables and hence none cannot be changed.
The C Idiom for String Copy
void mystrcpy (char *s, char *t) {
while (*s++ = *t++) ;
}
The previous version of this program tested if the assignment did
not return the character '\0', which has the value 0 (a fact about
ascii null).
However checking if something is not 0 is the same (in C) as asking
if it is true.
Finally, testing if something is true is the same as just testing
the something.
The C rules can seem cryptic, but they are consistent.
If you are trembling with fright over this scary
function, rest assured and see the following homework problem.
Homework: 5-5 (first
part).
Write a version of the library functions
char *strncpy(char *s, char *t, int n)
This copies at most n characters
from t to s.
This code is not scary like other copies since the user of the
routine can simply declare s to have space
for n characters.
Slick String Length Using Pointer Substraction
int mystrlen(char *s) {
char *p = s;
while (*p)
p++;
return p-s;
}
The code on the right applies the technique used to get the slick
string copy to the related function string length.
In addition it use pointer subtraction.
Note that when the return is executed, p points
just after the string (i.e., the character array) and s
points to its beginning.
Thus the difference gives the length.
Recall that this is the one case where subtraction of pointers is
well defined.
String Comparison
int mystrcmp(char *s, char *t) {
for (; *s == *t; s++,t++)
if (*s == '\0')
return 0;
return *s - *t;
}
We next produce a string comparison routine that is returns a
negative integer if the string s is lexicographically
before t, zero if they are equal, and a positive integer if
s is lexicographically after t.
The loop takes care of equal characters.
The function returns 0 if we reached the end of the equal
strings.
If the loop concludes, we have found the first difference.
A key is that if exactly one string has ended, its character ('\0')
is smaller
then the other string's character.
This is another ascii fact (ascii null is zero the rest are
positive).
I tried to produce a version using while(*s++ == *t++),
but that failed since the loop body and the post loop code was
dealing with the subsequent character.
I suppose it could have been forced to work if I used a bunch of
constructions like *(s-1), but that would have been
ugly.
5.6: Pointer Arrays; Pointers to Pointers
For the moment forget that C treats pointers and arrays almost the
same.
For now just think of a character pointer as another data type.
So we can have an array of 9 character pointers, e.g.,
char *A[9].
We shall see fairly soon that this is exactly how some systems
(e.g. Unix) store command line arguments.
#include <stdio.h>
int main() {
char *STG[3] = { "Goodbye", "cruel", "world" };
printf ("%s %s %s.\n", STG[0], STG[1], STG[2]);
STG[1] = STG[2] = STG[0];
printf ("%s %s %s.", STG[0], STG[1], STG[2]);
return 0;
}
Goodbye cruel world.
Goodbye Goodbye Goodbye.
The code on the right defines an array of 3 character pointers,
each of which is initialized to a string.
The first printf() has no surprises.
But the assignment statement should fail since we allocated space
for three strings of sizes 8, 6, and 6 and now want to wind up with
three strings each of size 8 and we didn't allocate any additional
space.
However, it works perfectly and the resulting output is shown as
well.
Question: What happened?
How can space for 8+6+6 characters be enough for 8+8+8?
Answer: The reason it works is that we
do not have three strings of size 8.
Instead we have one string of size 8, with three character pointers
pointing to it.
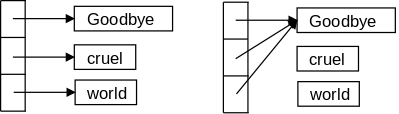
The picture on the right shows a before and after view of the array
and the strings.
This suggests and interesting possibility.
Imagine we wanted to sort long strings alphabetically (really
lexicographically).
Not to get bogged down in the sort itself assume it is a simple
interchange sort that loops and, if a pair is out of order, it
executes a swap, which is something like
temp = x;
x = y;
y = temp;
If x, y, and temp are (varying size,
long) strings then we have some issues to deal with.
- It is expensive to do the three assignments if the strings are
very long.
- If one of the strings is longer than the space allocated for
another, we either overwrite something else (and potentially end
the world) or refuse the copy and hence not complete the
sort.
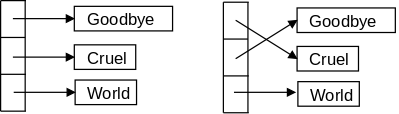
Both of these issues go away if we maintain an array of pointers to
the strings.
If the string pointed to by A[i] is out of order with
respect to the string pointed to by A[j], we swap the
(fixed size, short) pointers not the strings that they point to.
This idea is illustrated on the right.
#include <stdio.h>
void sort(int n, char *C[n]) {
int i,j;
char *temp;
for (i=0; i<n-1; i++)
for (j=i+1; j<n; j++)
if (mystrcmp(C[i],C[j]) > 0) {
temp = C[i];
C[i] = C[j];
C[j] = temp;
}
}
int main() {
char *STG[] = {"hello","99","3","zz","best"};
int i,j;
for (i=0; i<5; i++)
printf ("STG[%i] = \"%s\"\n", i, STG[i]);
sort(5,STG);
for (i=0; i<5; i++)
printf ("STG[%i] = \"%s\"\n", i, STG[i]);
return 0;
}
Putting all the pieces together, the code on the right,
plus the mystrcmp() function above, produces the following
output.
STG[0] = "hello"
STG[1] = "99"
STG[2] = "3"
STG[3] = "zz"
STG[4] = "best"
STG[0] = "3"
STG[1] = "99"
STG[2] = "best"
STG[3] = "hello"
STG[4] = "zz"
Note the first line of the sort function, in particular
the n in char C[n].
This is an addition made to C in 1999 (the language is called
sometimes called C-99 to distinguish it from C-89 or ansii-C as
described in our text, and K&R-C as described in the first
edition of our text).
Our text would write C[] instead of C[n].
You might question if the output is indeed sorted.
For example, we remember that ascii '3' is less than ascii
'9', and we know that in ascii 'b'<'h'<'z',
but why is '9'<'b'?
Well, I don't know why it is, but it is.
That is, in ascii the digits do in fact come before the letters.
Another Example
#include <stdio.h>
int main(int argc, char *argv[]) {
char c1 = '1', c2 = '2';
char ac[10] = "wxyXYZ"; // ac = Array of Chars
ac[1] = c1;
ac[2] = c2;
printf("ac[1]=%c ac[2]=%c\n", ac[1], ac[2]);
char *pc1, *pc2; // pc = Pointer to Char
pc1 = &ac[3];
pc2 = pc1+1;
printf("*pc1=%c *pc2=%c\n", *pc1, *pc2);
char *(apc[10]); // Array of Pointers to Char
apc[3] = pc1; // Points at ac[3]
apc[4] = pc2-2; // Points at ac[2]
printf("*apc[3]=%c *apc[4]=%c\n", *apc[3], *apc[4]);
return 0;
}
The program on the right includes several types of variables.
In particular we find chars, an arrays of chars,
pointers to chars, and an array of pointers
to chars.
The program, when run, produces the following output.
ac[1]=1 ac[2]=2
*pc1=X *pc2=Y
*apc[3]=X *apc[4]=2
You should first confirm that the types are correct.
For example, is * always applied to a pointer?
Since all the prints use %c for the values printed, all
those values must be chars.
Are they?
Then confirm that you agree with the values produced.
At one point the program adds 1 to the char
pointer pc1.
At another point it subtracts 2 from another char pointer.
This is valid only if the final value of the pointer is pointing
inside the same array as the initial value.
Is this the case?
5.7: Multi-dimensional Arrays
void matmul(int n, int k, int m, double A[n][k],
double B[k][m], double C[n][m]) {
int i,j,l;
for (i=0; i<n; i++)
for (j=0; j<m; j++) {
C[i][j] = 0.0;
for (l=0; l< k; l++)
C[i][j] += A[i][l]*B[l][j];
}
}
C does have normal multidimensional arrays.
For example, the code on the right multiplies two matrices.
In some sense C, like Java, has only one-dimensional arrays.
However, a one-dimensional array of one-dimensional arrays of
doubles is close to a two-dimensional array of doubles.
One difference is the notation: C/Java uses A[][] rather
than A[,].
Another is that, in the example on the right, A[n] is a
legal (one-dimensional) array.
The biggest difference is that the array need not be
rectangular, that is the rows need not be the same length.
The declaration in the function was not legal in the version of C
described in our text.
int A[2][3] = { {5,4,3}, {4,4,4} };
int B[2][3][2] = { { {1,2}, {2,2}, {4,1} },
{ {5,5}, {2,3}, {3,1} } };
Multidimensional arrays can be initialized.
Once you remember that a two-dimensional array is a one-dimensional
array the syntax for initialization is not surprising.
(C, like most modern languages uses row-major ordering so the last
subscript varies the most rapidly.)
Start Lecture #7
char amsg[] = "hello";
int main(int argc; char *argv[]) {
printf("%c\n", amsg[100]);
}
Note: Last time I ended with remarks relating an
array of size 1 to an array of size 10 and that a pointer to X is very
similar to array of X.
The point was that code on the right compiles and runs (it is
illegal but not caught) in part because the types match.
5.8: Initialization of Pointer Arrays
char *monthName(int n) {
static char *name[] = {"Illegal",
"Jan", "Feb", "Mar", "Apr",
"May", "Jun", "Jul", "Aug",
"Sep", "Oct", "Nov", "Dec"};
return (n<1 || n>12) ? name[0] : name[n];
}
The initialization syntax for an array of pointers follows the
general rule for initializing an array:
Enclose the initial values inside braces.
Question: How do we write an initial value for a
pointer?
Answer: We remember that an array is just a pointer
to the first element.
Looking at the code on the right we see this principle in action.
I believe the most common usage is for an array of character
pointers as in the example.
5.9: Pointers vs. Multi-dimensional Arrays
int A[3][4];
int *B[3];
Consider the two declarations on the right.
They look different, but both A[2][3] and
B[2][3] are legal (at least syntactically).
The real story is that they most definitely are different.
(In fact Java arrays have a great deal in common with the 2nd form
in C.)
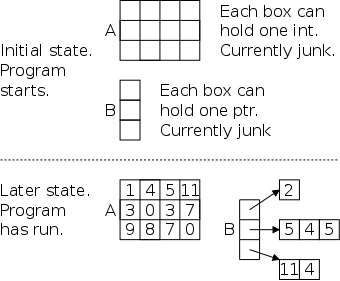
The declaration int A[3][4]; allocates space for 12
integers, which are stored consecutively so that A[i][j]
is the (4*i+j)th integer stored (counting from
zero).
With the simple declaration written, none of the integers is
initialized, but we have seen how to initialized
them.
The declaration int *B[3]; allocates space for
NO integers.
It does allocate space for 3 pointers (to
integers).
The pointers are not initialized so they currently point to junk.
The program must somehow arrange for each of them to point to a
group of integers (and must figure out when the group ends).
An important point is that the groups may have different lengths.
The technical jargon is that we can have a ragged array
as
shown in the bottom of the picture.
Arrays of Strings
The last diagram on the right show the relationship between a 2-D
array of integers and a 1-D array of pointers to integers noting
that the latter supports ragged arrays
.
In C probably more common than a ragged array of integers, is a
ragged array of chars, that is a 1-D array of pointers to (varying
length) strings.
We have already seen two examples of this.
The monthName program just above and the
Goodbye Cruel World diagrams in section 5.6.
We next illustrate that every C main() program on Unix
(e.g., on Linux) also uses a ragged array of chars, i.e., an array
of strings.
5.10: Command-line Arguments
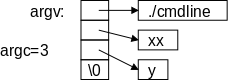
On the right is a picture of how arguments are passed to a (Unix)
command.
Each main() program receives two arguments an integer,
normally called argc for argument count, and an array of
character pointers, normally called argv for argument
vector.
The diagram shows argv as an array and the code below
treats it that way as well.
As always, an array name is also a pointer to the first element.
If you view argv as a pointer, then you would draw a box
for it with an arrow pointing to the array.
The book pictures it that way.
#include <stdio.h>
int main(int argc, char *argv[argc]) {
int i;
printf("My name is %s.\n", argv[0]);
printf("I was called with %d argument%s\n",
argc-1, (argc==2) ? "" : "s");
for (i=1; i<argc; i++)
printf("Argument #%d is %s.\n", i, argv[i]);
}
sh-4.0$ cc -o cmdline cmdline.c
sh-4.0$ ./cmdline
My name is ./cmdline.
I was called with 0 arguments.
sh-4.0$ ./cmdline x
My name is ./cmdline.
I was called with 1 argument.
Argument #1 is x.
sh-4.0$ ./cmdline xx y
My name is ./cmdline.
I was called with 2 arguments.
Argument #1 is xx.
Argument #2 is y.
sh-4.0$ ./cmdline -o cmdline cmdline.c
My name is ./cmdline.
I was called with 3 arguments.
Argument #1 is -o.
Argument #2 is cmdline.
Argument #3 is cmdline.c.
sh-4.0$ cp cmdline mary-joe
sh-4.0$ ./mary-joe -o cmdline cmdline.c
My name is ./mary-joe.
I was called with 3 arguments.
Argument #1 is -o.
Argument #2 is cmdline.
Argument #3 is cmdline.c.
Since the same program can have multiple names (more on that
later), argv[0], the first element of the argument vector,
is a pointer to a character string containing the name by which the
command was invoked.
Subsequent elements of argv point to character strings
containing the arguments given to the command.
Finally, there is a NULL pointer to indicate the end of the pointer
array.
The integer argc gives the total number of
pointers, including the pointer to the name of the command.
Thus, the smallest possible value for argc is 1 and
argc is 3 for the picture drawn above.
The code on the right shows how a program can access its name and
any arguments it was called with.
Having both a count (argc) and a trailing NULL pointer
(argv[argc]==NULL) is redundant, but convenient.
The code I wrote treats argv as an array.
It loops through the array using the count as an upper bound.
Another style would use something like
while (*argv)
printf("%s\n", *argv++);
which treats argv as a pointer and terminates when
argv points to NULL.
The second frame on the right shows a session using the code
directly above it.
- First, we show how to compile a C program and not have the
result called a.out.
- Next we run the resulting program with differing numbers of
arguments.
Note the use of the conditional expression to get singular and
plural correct.
- Finally, we show one way (via copying the executable) that the
same program can have more than one name.
We could have renamed/moved the executable as well.
Another way would have been to recompile the program giving a
different file name after -o (or not using -o
and getting a.out).
In 202 you will learn two other ways (hard and soft links).
Simple Application of Command Line Arguments
Now we can get rid of some symbolic constants that should be
specified at run time.
Here are two before and after examples.
The code on the left uses symbolic constants; on the right we use
command line arguments.
Fahrenheight to Celcius
#include <stdlib.h>
#include <stdio.h> #include <stdio.h>
#define LO 0
#define HI 300
#define INCR 20
main() { int main (int argc, char *argv[argc]) {
int F; int F;
for (F=LO; F<=HI; F+=INCR) for (F=atoi(argv[1]); F<=atoi(argv[2]);
F+=atoi(argv[3]))
printf("%3d\t%5.1f\n", F, printf("%3d\t%5.1f\n", F,
(F-32)*(5.0/9.0)); (F-32)*(5.0/9.0));
return 0;
} }
Notes.
- Now main() is specified correctly; it returns an
integer and has the complicated argument structure we just
described.
As written on the left the program terminates
abnormally
(it doesn't return 0).
- We use of atoi() to convert the ascii (character) form
of the numerical inputs into integers.
Solving Quadratic Equations
#include <stdlib.h>
#include <stdio.h> #include <stdio.h>
#include <math.h> #include <math.h>
#define A +1.0 // should read
#define B -3.0 // A,B,C
#define C +2.0 // using scanf()
void solve (float a, float b, float c); void solve (float a, float b, float c);
int main() { int main(int argc, char *argv[argc]) {
solve(A,B,C); solve(atof(argv[1]), atof(argv[2]),
atof(argv[3]));
return 0; return 0;
} }
void solve (float a, float b, float c){ void solve (float a, float b, float c){
float d; float d;
d = b*b - 4*a*c; d = b*b - 4*a*c;
if (d < 0) if (d < 0)
printf("No real roots\n"); printf("No real roots\n");
else if (d == 0) else if (d == 0)
printf("Double root is %f\n", printf("Double root is %f\n",
-b/(2*a)); -b/(2*a));
else else
printf("Roots are %f and %f\n", printf("Roots are %f and %f\n",
((-b)+sqrt(d))/(2*a), ((-b)+sqrt(d))/(2*a),
((-b)-sqrt(d))/(2*a)); ((-b)-sqrt(d))/(2*a));
} }
Notes.
- Again main() is now specified correctly.
When we had main() we said
don't check the
arguments
.
Now we specify them correctly.
- This time we need atof() since the arguments are
floating point.
include <string.h>
include <stdio.h>
include <ctype.h>
int main (int argc, char *argv[argc]) {
int c, makeUpper=0;
if (argc > 2)
return argc; // error return
if (argc == 2)
if (strcmp(argv[1], "-toupper")) {
printf("Arg %s illegal.\n", argv[1]);
return -1;
}
else // -toupper was arg
makeUpper=1;
while ((c = getchar()) != EOF)
if (!isdigit(c)) {
if (isalpha(c) && makeUpper)
c = toupper(c);
putchar(c);
}
return 0;
}
Specifying Options
Often a leading minus sign (-) is used for optional command line
arguments.
The program on the right removes all digits from the input.
If it is given the argument -toupper
it also converts all
letters to upper case using the toupper() library routine.
Notes
- We allow only 1 (optional) argument so the only legal values for
argc are 1 and 2.
- If there is an argument (argc==2) then we check to be
sure it is -toupper and if so set the
Boolean
makeUpper.
- Note the use of library routines, isdigit(),
isalpha(), toupper.
Demo this function on my laptop.
Homework:
At the very end of chapter 3 you wrote escape() that
converted a tab character into the two characters \t
(it also converted newlines but ignore that).
Call this function detab() and call the reverse function
entab().
Combine the entab() and detab functions by writing
a function tab that has one command line argument.
tab -en # performs like entab()
tab -de # performs like detab()
5.11: Pointers to Functions
#include <ctype.h>
#include <string.h>
#include <stdio.h>
// Program to illustrate function pointers
int digitToStar(int c); // Cvt digits to *
int letterToStar(int c); // Cvt letters to *
int main (int argc, char *argv[argc]) {
int c;
int (*funptr)(int c);
if (argc != 2)
return argc;
if (strcmp(argv[1],"digits")==0)
funptr = &digitToStar;
else if (strcmp(argv[1],"letters")==0)
funptr = &letterToStar;
else
return -1;
while ((c=getchar())!=EOF)
putchar((*funptr)(c));
return 0;
}
int digitToStar(int c) {
if (isdigit(c))
return '*';
return c;
}
int letterToStar(int c) {
if (isalpha(c))
return '*';
return c;
}
In C you can do very little with functions, mostly define them
and call them (and take their address, see what follows).
However, pointers to functions (called function pointers) are real
values.
You can do a lot with function pointers.
- A function can return a function pointer.
- You can declare variables that hold function pointers.
- You can have an array of function pointers.
- You can have a structure with function pointer components.
- A function can take a function pointer argument.
- etc.
The program on the right is a simple demonstration of function
pointers.
Two very simple functions are defined.
The first function, digitToStar() accepts an integer
(representing a character) and return an integer.
If the argument is a digit, the value returned is (the integer
version of) '*'.
Otherwise the value returned is just the unchanged value of the
argument.
Similarly letterToStar() convert a letter to '*' and
leaves all other characters unchanged.
The star of the show is funptr.
Read its declaration carefully:
The variable funptr is the kind of thing that, once
de-referenced, is the kind of thing that, once given an integer, is
an integer.
So it is a pointer to something.
That something is a function from integers to integers.
The main program checks the (mandatory) argument.
If the argument is "digits", funptr is set to the address of
digitToStar().
If the argument is "letters", funptr is set to the address
of letterToStar().
Then we have a standard getchar()/putchar() loop with a
slight twist.
The character (I know it is an integer) sent to putchar()
is not the naked input character, but instead is the input character
processed by whatever function funptr points to.
Note the "*" in the call to putchar().
Note: C permits abbreviating &function-name to
function-name.
So in the program above we could say
funptr = digitToStar;
funptr = letterToStar;
instead of
funptr = &digitToStar;
funptr = &letterToStar;
I don't like that abbreviation so I don't use it.
Others do like it and you may use it if you wish.
One difference between a function pointer and a
function is their size.
A big function is big, a small function is small, and an enormous
function is enormous.
However all function pointers are the same size.
Indeed, all pointers in C are the same size.
This makes them easier for the system to deal with.
5.12: Complicated Declarations
We are basically skipping this section.
It shows some examples more complicated than we have seen (but are
just more of the same
—one example is below).
The main part of the section presents a program that converts C
definition to/from more-or-less English equivalents.
Here is one example of a complicated declaration.
It is basically the last one in the book with function arguments
added.
char (*(*f[3])(int x))[5]
Remembering that *f[3] (like *argv[argc] is an
array of 3 pointers to something not a pointer to an array of 3
somethings, we can unwind the above to.
The variable f is an array of size three of pointers.
Remembering that *(g)(int x) = *g(int x) is a
function returning a pointer and not a pointer to a function, we can
further unwind the monster to.
The variable f is an array of size three of pointers to
functions taking an integer and returning a pointer to an array of
size five of characters.
One more (the penultimate from the book).
char (*(f(int x))[5])(float y)
The function f takes and integer and returns a pointer to
an array five pointers to functions taking a real and returning a
character.
Chapter 6: Structures
For a start, a Java programmer can think of structures as basically
classes and objects without methods.
Section 6.1: Structure Basics
#include <math.h>
struct point {
double x;
double y;
};
struct rectangle {
struct point ll;
struct point ur;
} rect1;
double f(struct point pt);
struct point mkPoint(double x, double y);
struct point midPoint(struct point pt1,
struct point pt2);
int main(int argv, *char argv[]) {
struct point pt1={40.,20.}, pt2;
pt2 = pt1;
rect1.ll = pt2;
pt1.x += 1.0;
pt1.y += 1.0;
rect1.ur = pt1;
rect1.ur.x += 2.;
return 0;
}
On the right we see some simple structure declarations for use in a
geometry application.
They should be familiar from your experience with Java classes in
CS101 and CS102.
The top declaration defines the struct point type.
This is similar to defining a class without methods.
As with Java classes, structures in C help organize data by
permitting you to treat related data as a unit.
In the case of a geometric point, the x and y
coordinates are closely related mathematically and, as components of
the struct point type, they become closely related in
the program's data organization.
The next definition defines both a new type
struct rectangle and a variable rect1 of this
type.
Note that we can use struct point, a previously
defined struct, in the declaration of struct
rectangle.
Recall from plane geometry in high school that a rectangle is
determined by its lower left ll and upper right ur
corners.
The definition in main() of pt1 illustrates an
initialization.
C does not support structure constants.
Hence you could not in main() have the assignment
statement
pt1 = {40., 20.};
as an executable statement within main().
We see in the executable statements of main() that one can
assign a point to a point as well as assigning to each
component.
Since the rectangle rect1 is composed of points,
which are in turn composed of doubles, we can assign
a point to a point component of
a rectangle and can assign a double to a
double component of a point component of
a rectangle.
If you wrote a Java program for geometry (we did when I last taught
201/202), it probably had classes like rectangle
and point and had objects like pt1, pt2,
and rect1.
Given these classes, the assignment statements in our
C-language main() function would have been more or less
legal Java statements as well.
Start Lecture #8
Remark: Lab#1 assigned
6.2: Structures and Functions
double dist (struct point pt) {
return sqrt(pt.x*pt.x+pt.y*pt.y);
}
struct point mkPoint(double x, double y) {
// return {x, y}; not C
struct point pt;
pt.x = x;
pt.y = y;
return pt;
}
struct point midpoint(struct point pt1,
struct point pt2){
// return (pt1 + pt2) / 2; not C
struct point pt;
pt.x = (pt1.x+pt2.x) / 2;
pt.y = (pt1.y+pt2.y) / 2;
return pt;
}
void mvToOrigin(struct rectangle *r){
(*r).ur.x = (*r).ur.x - (*r).ll.x;
r->ur.y = r->ur.y - r->ll.y;
r->ll.y = 0;
r->ll.x = 0;
}
The only legal operations on a structure are copying it, assigning
to it as a unit, taking its address with &, and assessing its
members.
On the right we see four geometry functions.
Although all four deal with structs, they do so
differently.
A function can receive and return structures, but you may prefer to
specify the constituent native types instead.
A third alternative is to utilize a pointer to
a struct.
- The first function dist() takes a struct point
as an argument and returns a double.
This seems appropriate since geometrically we think of the distance
between 2 points not between 4 numbers.
- The second function mkpoint() in contrast
has double arguments and returns a struct point.
It would have been illegal for mkpoint to have included
a
return {x, y}
statement since C
does not support this.
- Next we have midpoint(), which has
struct point parameters and return type.
We think of a midpoint of two points not of four numbers.
It would be nice for midpoint to be basically a 1-liner
return {(pt1 + pt2) / 2}
but again that is not C.
- The last function mvToOrigin(), which moves a rectangle
so that its lower left corner is at the origin, takes one
parameter, a pointer to a
struct rectangle.
I will say more about this function just below.
As we have seen, functions can take structures as parameters, but
is that a good idea?
Should we instead use the components as parameters or perhaps pass a
pointer to the structure?
For example, if main() wishes to pass pt1 to a
function f(), should we write.
- f(pt1)
- f(pt1.x, pt1.y)
- f(&pt1)
Naturally, the declaration of f() will be different in
the three cases.
When would each case be appropriate?
- f(pt1) This form is the most natural
where the parameter is viewed as a point, not as two real numbers.
Our example was distance from the
origin int dist(pt).
- f(pt1.x, pt1.y) A common example is a
Java constructor like
function that produces a structure
from its constituents, for example mkPoint(pt1.x, pt2.y)
above would produce a new point having coordinates
a mixture
of pt1 and pt2.
Another possibility is viewing midpoint() above as a
function on rectangles, in which case the arguments
to midpoint() rect1.pt1 and rect1.pt2
are the components of the rect1.
- f(&pt1) A simple reason for using
the address is that it might be significantly shorter than the
structure itself and thus it would be faster and take less memory
to pass the address.
A perhaps more interesting reason to pass the address is so that
the receiving function can modify the argument.
This is shown in mvToOrigin().
The first assignment statement in mvToOrigin() uses the
standard dereferencing operator *
followed by the standard
component selection operator .
.
Due to precedence, the parentheses are needed.
The remaining three lines use the abbreviation ->
.
Note: The ->
abbreviation is
employed almost universally.
Constructs like ptr1->elt5 are very common; the
long form
(*ptr1).elt5 is much less common.
Homework: Write two
versions of mkRectangle, one that accepts two points, and
one that accepts 4 real numbers.
6.3: Arrays of Structures (and Structures of Arrays)
#define MAXVAL 10000
#define ARRAYBOUND (MAXVAL+1)
int G[ARRAYBOUND];
int P[ARRAYBOUND];
struct gameValType {
int G[ARRAYBOUND];
int P[ARRAYBOUND];
} gameVal;
struct gameValType {
int G;
int P;
} gameVal[ARRAYBOUND];
#define NUMEMPLOYEES 2
struct employeeType {
int id;
char gender;
double salary;
} employee[NUMEMPLOYEES] = {
{ 32, 'M', 1234. },
{ 18, 'F', 1500. }
};
Consider the following game.
- Start with a positive integer N
- If N is 1, stop.
- If N is even, divide by 2.
- If N is odd, set N = 3N+1.
So, starting with N=7, you get
7 22 11 34 17 52 26 13 40 20 10 5 16 8 4 2 1.
and starting with N=27, you get
27 82 41 ... 9232 ... 160 80 40 20 10 5 16 8 4 2 1.
It is an open problem if all positive integer eventually get to 1.
This has been checked for MANY numbers.
Let G[i] be the number of rounds of the game needed to get 1.
G[1]=0, G[2]=1, G[7]=16.
Factoring into primes is fun too.
So let P[N] be the number of distinct prime factors of N.
P[2]=1, P[16]=1, P[12]=2 (define P[1]=0).
This leads to two arrays as shown on the right in the top
frame.
We might want to group the two arrays into a structure as in the
second frame.
This version of gameVal is a structure of arrays.
In this frame the number of distinct prime factors of 763 would be
stored in gameVal.P[763].
In the third frame we grouped together the values of G[n]
and P[n].
This version of gameVal is an array of structures.
In this frame the number of distinct prime factors of 763 would be
stored in gameVal[763].P.
If we had a database with employeeID, gender, and salary, we might
use the array of structures in the fourth frame.
Note the initialization.
The inner {} are not needed, but I believe they make the code
clearer.
The sizeof and sizeof() Operators
How big is the employee array of structures?
How big is employeeType?
C provides two versions of the sizeof unary operator to
answer these questions.
- sizeof object gives the size of any object (in
bytes).
- sizeof (type name) gives the size of any type (in
bytes).
These functions are not trivial and indeed the answers are system
dependent ... for two reasons.
- Certain primitive types (e.g., int) may have different
sizes in different systems.
- The alignment requirements may be different.
Example: Assume char requires 1 byte, int
requires 4, and double requires 8.
Let us also assume that each type must be aligned on an address that
is a multiple of its size and that a struct must be aligned
on an address that is a multiple of 8.
So the data in struct employeeType requires
4+1+8=13 bytes.
But three bytes of padding are needed between gender and
salary so the size of the type is 16.
Homework: How big is
each version of sizeof(struct gameValType)?
How big is sizeof employee?
Calculating the Number of Elements in an Array
#include <stdio.h>
int main (int argc, char *argv[argc]) {
struct howBig {
int n;
double y;
} howBigAmI[] = { {26, 18.}, {33, 99.} };
printf ("howBigAmI has %ld entries.\n",
sizeof howBigAmI / sizeof(struct howBig));
}
In the example above it is easy to look at the initialization and
count the array bound for employee.
An annoyance is that you need to change the #define for
NUMEMPLOYEES if you add or remove an employee from the
initialization list.
A more serious problem occurs if the list is long in which case
manually counting the number of entries is tedious and, much worse,
error prone.
Instead we can use sizeof and sizeof() to have
the compiler compute the number of entries in the array.
The code is shown on the right.
Start Lecture #9
getword(char *word, int limit)
int getword(char *word, int lim) {
int c, getch(void);
void ungetch(int);
char *w = word;
while (isspace(c = getch())) ;
if (c != EOF)
*w++ = c;
if (!isalpha(c)) {
*w = '\0';
return c;
}
for ( ; --lim > 0; w++)
if (!isalnum(*w = getch())) {
ungetch(*w);
break;
}
*w = '\0';
return word[0];
}
As its name suggests the purpose of getword() is to get
(i.e., read) the next word from the input.
It's first parameter is a buffer into which getword() will
place the word found.
Although declared as a char *, the parameter is viewed as
pointing to many characters, not just one.
The second parameter throttles getword(), restricting the
number of characters it will read.
Thus getword() is not scary; the caller need only ensure
that the first parameter points to a buffer at least as big as the
second parameter specifies.
The definition of a word is technical.
A word is either a string of letters and digits beginning with a
letter, or a single non-white space character.
The return value of the function itself is the first character of
the word, or EOF for end of file, or the character itself if it is
not alphabetic.
The program has a number of points to note.
- The declaration of w initializes w,
not *w.
- Question: Changing word
in getword() would not affect the caller, so why do we
need w?
Answer: w is created and used so that
the original value of word is available
for word[0] at the end.
- The expression *w++ is a common C idiom; make sure you
understand what it does.
In particular, the assignment 2 lines below *w++
does not overwrite the value stored.
- The library routine isaphanum() returns true for a
letter or digit.
You can find this information on any unix machiine (e.g.,
access.cims.nyu.edu) by typing
man alphanum
.
6.4: Pointers to Structures
#include <stdio.h>
#include <ctype.h>
#include <string.h>
#define MAXWORDLENGTH 50
struct keytblType {
char *keyword;
int count;
} keytbl[] = {
{ "break", 0 },
{ "case", 0 },
{ "char", 0 },
{ "continue", 0 },
// others
{ "while", 0 }
};
#define NUMKEYS (sizeof keytbl / sizeof keytbl[0])
int getword(char *, int); // no var names given
struct keytblType *binsearch(char *);
int main (int argc, char *argv[argc]) {
char word[MAXWORDLENGTH];
struct keytblType *p;
while (getword(word,MAXWORDLENGTH) != EOF)
if (isalpha(word[0]) &&
((p=binsearch(word)) != NULL))
p->count++;
for (p=keytbl; p<keytbl+NUMKEYS; p++)
if (p->count > 0)
printf("%4d %s\n", p->count, p->keyword);
return 0;
}
struct keytblType *binsearch(char *word) {
int cond;
struct keytblType *low = &keytbl[0];
struct keytblType *high = &keytbl[NUMKEYS];
struct keytblType *mid;
while (low < high) {
mid = low + (high-low) / 2;
if ((cond = strcmp(word, mid->keyword)) < 0)
high = mid;
else if (cond > 0)
low = mid+1;
else
return mid;
}
return NULL;
}
The program on the right illustrates well the use of pointers to
structures and also serves as a good review of many C concepts.
The overall goal is to read text from the console and count the
occurrence of C keywords (such as break, if,
etc.).
At the end print out a list of all the keywords that were present
and how many times each occurred.
Now lets examine the code on the right.
- The first interesting item is keytbl, the table of
keywords.
It is an array of struct keytblType; each entry of the
array contains string and an integer.
- The initialization of keytbl serves two purposes.
Each string is set to a C keyword and each count is initialized to
zero.
The size of the array is determined by the initialization and the
next line cleverly determines that size.
The entries are initialized in alphabetical order, which permits
the use of a binary search to find an entry.
- The main program contains two loops: The first computes the
counts and the second outputs the results.
- The first loop calls getword() and terminates on
receiving EOF.
The word is looked up in the keytbl using
binsearch.
The value returned by binsearch is either a pointer
to the table entry found or NULL if the word is not a
keyword (i.e., is not in the table).
If the word is found, the corresponding count is
incremented.
I don't believe the isalpha() test is needed since,
if the character is not a letter, binsearch will
return NULL; it is presumably there to save a useless
search.
- The second loop traverses the table and prints out all
entries with non-zero counts.
Note the test used in the for statement and
remember that the increment p++
increments p by
enough
so that it points to
the next entry.
- As I suspect you know, a binary search is quite efficient (its
running time is logarithmic in the size of the table) and very
easy to get wrong (< vs. <=, mid vs. mid-1
vs. mid+1, etc.).
The only real difference between this one and the one I hope you
saw in 102, is that the code on the right is pointer based not
array based.
This explains the mysterious code to set mid to the
midpoint
between high and low.
But, other than that oddity, I find it striking how array-like
the code looks.
That is, the manipulations of the pointers could just as well be
manipulating indices.
- If you have the text as well as your 101-102 material, I believe
it would be useful for you to compare the following three versions
of binary search.
- The java, array-based version from 101-102.
- The C, array-based version from section 6.3 of our
text (not covered in these notes).
- The C, pointer-based version on the right.
6.5: Self-referential Structures
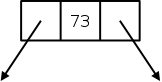
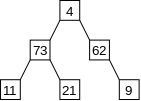
Consider a basic binary tree.
A small example is shown on the near right; one cell is detailed on
the far right.
Looking at the diagram on the far right suggests a structure with
three components: left, right, and value.
The first two refer to other tree nodes and the third is an
integer.
I am fairly sure you did trees in 101-102 but I will still describe
the C version.
I will say that in both Java and C the key is the use of pointers.
In C this is made very explicit by the use of *.
In Java it is somewhat under the covers.
struct bad {
struct bad left;
int value;
struct bad right;
};
struct treenode_t {
struct treenode_t *left;
int value;
struct treenode_t *right;
};
Since trees are recursive data structures you might expect some
sort of recursive structure.
Consider struct bad defined on the right.
(You might be fancier and have a struct tree, which
contains a struct root, which has an integer value and two
struct tree's).
But struct bad and its fancy friends are infinite
data structures: The left and right components are the same type as
the entire structure.
So the size of a struct bad is the size of
an int plus the size of two struct bad's.
Since the size of an int exceeds zero, the total size must
be infinite.
Some languages permit infinite structures providing you never try to
materialize
more than a finite piece.
But C is not one of those languages so for us struct bad is
bad!
Instead, we use struct treenode_t as shown on
the right (names like treenode_t are a shorter and very commonly
used alternative to names like treenodeType).
The key is that a struct treenode does not
contain an internal struct treenode.
Instead it contains pointers to two internal
struct treenodes.
Be sure you understand why struct treenode_t is finite and
corresponds exactly to the picture above it.
Mutually Referential/Recursive Structures
struct s {
int val;
struct t *pt;
};
struct t {
double weight;
struct s *PS;
};
What if you have two structure types that need to reference each
other.
You cannot have a struct s contain a struct t if
the struct t contains a struct s.
If you did the size of s would exceed the size
of t and the size of t would exceed the size
of s.
Once again pointers come to the rescue as illustrated on the right.
Neither structure is infinite.
A struct s contains one integer and one pointer.
A struct t contains one double and one pointer.
Neither is a subset of the other, instead each references (points at)
the other
Linked Lists: An Unbounded 1D Data Structure
struct llnode_t {
long data;
struct llnode_t *next;
}

Probably the most familiar 1D unbounded data structure is the
linked list, well studied in 101-102.
On the near right we have a diagram of a small linked list and
further to the right we show the C declaration of a structure
corresponding to one node in the diagram.
Again we note that a struct llnode_t does not
contain an struct llnode_t.
Instead it contains a pointer to such a node.
With one pointer in each node the structure has a natural 1D
geometric layout.
Trees, in contrast, have two pointers per node and have a natural 2D
geometric layout.
Nested Linked Links: Another 2D Data Structure
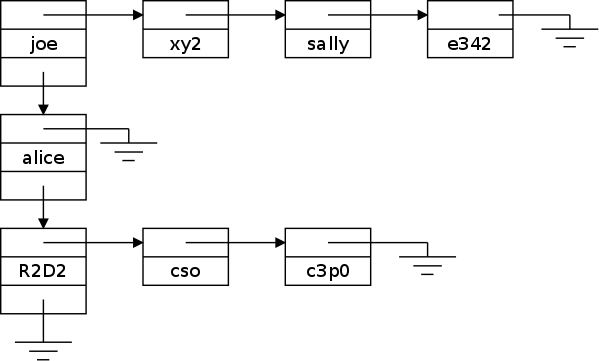
Instead of trees, we will investigate a different 2-dimensional
structure, a linked list of linked lists.
Eventually, this will become the subject of lab 2, but not until
after lab1 is due.
Although all the actual data are strings (i.e., char *),
there are two different types of structures present, the vertical
list of node2d's and the many horizontal lists of
node1d's.
Actually it is a little more complicated.
Each horizontal list has a list head that is a node2d and
there must be somewhere (not shown in the diagram) a pointer to
the first
node2d (i.e., the node with
data joe).
The three decreasing length horizontal lines indicated that the
pointer in question is null.
(I borrow that symbol from electrical engineering, where it is used
to represent ground
.
The form of the individual nodes
struct node2d {
struct node1d *first;
char *name;
struct node2d *down;
};
struct node1d {
struct node1d *next;
char *name;
};
The structure definitions are on the right.
Be sure you understand why the picture above agrees with the C
code on the right.
The diagram (and the code) suggests a hierarchy: the nodes in the
left hand column are higher level
than the others.
You can think of the struct node1d's on a single row
belonging to a list headed by the struct node2d on the left
of that same row.
Note that every struct node1d is the same (rather small)
size independent of the length of the name.
In that sense the figure is misleading since is suggests that
alice
is larger that joe
.
The confusion is that the node does not contain the
name alice
but rather a (fixed size) pointer to the
name.
Said using C terminology name the component of the
structure is a fixed size pointer.
The possibly large string is the object pointed to by name,
i.e., it is *name.
But *name is a char, which is even smaller than a
pointer.
Better said is that name points to the first character of
the string; you must look at the string itself to see where it
ends.
One question remains.
The string itself can be big.
If it is a constant, then the compiler leaves space for it.
Question: What if the string is generated at
runtime?
Answer: malloc().
6.5.A More on 2D Linked Lists
This was presented in lecture 11, but belongs here A problem during
the original presentation of 2D linked lists was it was hard to see
the structures and diagrams at the same time.
I have a handout that has the diagram illustrating the Example
Configuration on one side of the page and the other side of the page
shows the output from printConfig() applied to the
example.
Let's go through mkExConfig to see how to generate the Example
Configuration.
Start Lecture #10
Remark: A practice midterm is available.
See the course home page.
It is probably too long.
malloc()
As you know, in Java objects (including arrays) have to be created
via the new operator.
We have seen that in C this is not always needed: you can declare
a struct rectangle and then declare several
rectangles.
However, this doesn't work if you want to generate the rectangles
during run time.
When you are writing lab 2, you won't know how many 2d nodes or 1d
nodes will be needed.
So we need a way to create an object during run time.
In C this uses the library function malloc(), which takes
one argument, the amount of space to be allocated.
The function malloc() returns a pointer to this space.
Since malloc() is not part of C, but is instead just a
library routine, the compiler does not treat it specially (unlike
the situation with new, which is part of
Java).
Since malloc() is just an ordinary function, and we want it
to work for dynamic objects of any type (e.g., an int, a
char *, a struct treenode, etc), and
there is no way to pass the name a type to a function, two questions
arise.
- How do we arrange that the space returned by malloc()
meets the alignment requirements of the object we desire?
- How do we arrange that the pointer returned by
malloc() is a pointer to the correct type.
The alignment question is easy and can be essentially ignored.
We just have malloc() return space aligned on the most
stringent requirement.
So, if double requires 8-byte alignment, and all structures
require 16-byte alignment, and all other data types require 4-byte
alignment, then malloc() always returns space aligned on a
16-byte boundary (i.e., the address is a multiple of 16).
Ensuring type correctness is not automatic, but not hard.
Specifically, malloc() returns a void *,
which means it is a pointer that must be explicitly coerced to the
correct type.
For example, lab 2 might contain code like
struct node2d *p2d;
p2d = (struct node2d *) malloc(sizeof(struct node2d));
free()
The library routine free(void *p) returns to the system
memory obtained by malloc().
Indeed p must be a pointer returned by a previous call to
malloc().
Note that the order in which items are freed need not match the
order in which they were obtained.
It is clearly an error to continue using memory you already freed.
It will very likely lead to a crash with very little useful
diagnostic information available.
Advice: Try very hard not to make this error.
Note
See in addition section 7.8.5 below.
6.6: Table Lookup
Skipped
6.7: Typedef
Instead of declaring pointers to trees via
struct treenode *ptree;
we can write
typedef struct treenode *Treeptr;
Treeptr ptree;
Thus
treeptr is a new name for the type
struct treenode *.
As another example, instead of
char *str1, *str2;
We could write
typedef char *String;
String str1, str2;
Note that this does not give you a new type; it
just gives you a new name for an existing type.
In particular str1 and str2 are still pointers to
characters even if declared as a String above.
A common convention is to capitalize the a typedef'ed
name.
6.8: Unions
Saving Space by Sharing Memory between 2 or More Variables
struct something {
int x;
union {
double y;
int z;
}
}
Traditionally union was used to save space when memory was
expensive.
Perhaps with the recent emphasize on very low power devices, this
usage will again become popular.
Looking at the example on the right, y and z would
be assigned to the same memory locations.
Since the size allocated is the larger of what is needed the union
takes space max(sizeof(double),sizeof(int)) rather than
sizeof(double)+sizeof(int) if a union was not done.
It is up to the programmer to know what is the actual variable
stored.
The union shown cannot be used if y and z are both
needed at the same time.
It is risky since there is no checking done by the language.
Meeting Alignment Constraints
A union is aligned on the most severe alignment of its
constituents.
This can be used in a rather clever way to meet a requirement of
malloc().
As we mentioned above when discussing malloc(), it is
sometimes necessary to force an object to meet the most severe
alignment constraint of any type in the system.
How can we do this so that if we move to another system where a
different type has the most severe constraint, we only have to
change one line?
struct something {
int x;
struct something *p;
// others
} obj;
// assume long most severely aligned
typedef long Align
union something {
struct dummyname {
int x;
union something *p;
// others
} s;
Align dummy;
}
typedef union something Something;
Say struct something, as shown in the top frame on the
right, is the type we want to make most severely aligned.
Assume that on this system the type long has the most
severe alignment requirement and look at the bottom frame on the
right.
The first typedef captures the assumption that
long has the most severe alignment requirement on the
system.
If we move to a system where double has the most severe
alignment requirement, we need change only this one line.
The name Align was chosen to remind us of the purpose of
this type.
It is capitalized since one common convention is to capitalize all
typedefs.
The variable dummy is not to be used in the program.
Its purpose is just to force the union, and
hence s to be most severely aligned.
In the program we declare an object say obj to be
of type Something (with a capital S) and use
obj.s.x instead of obj.x as in the top frame.
The result is that we know the structure containing
x is most severely aligned.
See section 8.7 if you are interested.
6.9: Bit Fields
Skipped
Start Lecture #11
Chapter 7: Input and Output
7.1: Standard Input and Output
getchar() and putchar()
This pair form the simplest I/O routines.
#include <stdio.h>
int main (int argc, char *argv[argc]) {
int c;
while ((c = getchar()) != EOF)
if (putchar(c) == EOF)
return EOF;
return 0;
}
The function getchar() takes no parameters and returns an
integer.
This integer is the integer value of the character read from
stdin or is the value of the symbolic parameter EOF
(normally -1), which is guaranteed not the be the integer value of
any character.
The function putchar() takes one integer parameter, the
integer value of a character.
The character is sent to stdout and is returned as the
function value (unless there is an error in which case EOF is
returned.
The code on the right copies the standard input (stdin), which is
usually the keyboard, to the standard output (stdout), which is
usually the screen.
We built the getch() / ungetch()
from getchar().
Homework: 7.1.
Write a program that converts upper case to lower or lower case to
upper, depending on the name it is invoked with, as found in
argv[0]
Formatted Output—printf
We have already seen printf().
A surprising characteristic of this function is that it has a
variable number of arguments.
The first argument, called the format string, is required.
The number of remaining arguments depends on the value of the first
argument.
The function returns the number of characters printed, but that is
not so often used.
Technically its declaration is
int printf(char *format, ...);
The format string contains regular characters, which are just sent
to stdout unchanged and conversion specifications
,
each of which determines how the value of the next argument is to be
printed.
The conversion specification begins with a %
, which is
optionally followed by some modifiers, and ends with a conversion
character.
We have not yet seen any modifiers but have seen a few conversion
characters, specifically d for an integer (i is
also permitted), c for a single character, s for a
string, and f for a real number.
There are other conversion characters that can be used, for
example, to get real numbers printed using scientific notation.
The book gives a full table.
There are a number of modifiers to make the output line up and look
better.
For example, %12.3f means that the real number will be
printed using 12 columns (or more if the number is too big to fit in
12 columns) with 3 digits after the decimal point.
So, if the number was 36.3 it would be printed as
||||||36.300
where I used |
to represent a blank.
Similarly -1000. would be printed as |||-1000.000
.
These two would line up nicely if printed via
printf("%12.3f\n%12.3f\n\n", 36.3, -1000.);
A Relative of printf(): sprintf()
The function
int sprintf(char *string, char *format, ...);
is very similar to printf().
The only difference is that, instead of sending the output to
stout (normally the screen), sprintf() assigns it
to the first argument specified.
char outString[50];
int d = 14;
sprintf(outString, "The value of d is %d\n", d);
For example, the code snippet on the right results in the first 23
characters (assuming I counted correctly) of outString
containing The value of d is 14 \n\0 while the remaining 27
characters of outString continue to be uninitialized.
Since the system cannot in general check that the first argument is
big enough, care is needed by the programmer, for example checking
that the returned value is no bigger than the size of the first
argument.
That is, sprintf() is scary.
A good defense is to use instead snprintf(), which
like strncpy(), guarantees than no more than n
bytes will be assigned (n is an additional parameter
to strncpy).
7.3 Variable-length Argument Lists
As we mentioned, printf() takes a variable number of
arguments.
But remember that printf() is not special, it is just a
library function, not an object defined by the language or known to
the compiler.
That is, anyone can write a C program with declaration
int myfunction(int x, float y, char *z, ...)
and it will have three named arguments and zero or more unnamed
arguments.
There is some magic needed to get the unnamed arguments.
However, the magic is needed only by the author of the
function; not by a user of the
function.
7.4 Formatted Input—scanf
Related to the Java Scanner class is the C function
scanf().
The function scanf() is to printf()
as getchar() is to putchar().
As with printf(), scanf() accepts one required
argument (a format string) and a variable number of additional
arguments.
Since this is an input function, the additional arguments give the
variables into which input data is to be placed.
Consider the code fragment shown on the top frame to the right and
assume that the user enters on the console the lines shown on the
bottom frame.
int n;
double x;
char str[50];
scanf("%d %lf %s %20s", &n, &x, str);
22 37.5
no-blanks-here
- Perhaps the first point to notice is that the non-arrays
n and x are preceded with &s.
This is, as usual, because C is a call-by-value language and
there would be no way for scanf() to assign a value to
x if the argument was simply x.
It is a common error (at least for me) to forget the &, which
can lead to disastrous results since you would then be giving some
number (the current value of x) to scanf, which
it would treat as an address into which it would try to store the
input.
- 22 is assigned to n.
- 37.5 is assigned to x.
The specification is %lf, the l indicating a
long (perhaps wide would have been better) floating point
variable, i.e., a double, is being assigned to.
- The next assignment is to str.
Since this variable is an array and an array name means a pointer
to the first element, it is already an address so no & is
used).
- scanf() skips over white space so newlines in the input
are skipped.
It also considers an input item to end whenever white space is
encountered, which is why blanks cannot occur for a string
input.
A Relative of scanf(): sscanf()
The function
int sscanf(char *string, char *fmt, ...);
is very similar to scanf().
The only difference is that, instead of getting the input
from stdin (normally the keyboard), sscanf() gets it
from the first argument specified.
7.5 File Access
So far all our input has been from stdin and all our
output has been to stdout (or from/to a string for
scanf()/sprintf).
What if we want to read and write a file?
As I mentioned in class you can use the redirection operators of
the command interpreter (the shell), namely < and
>, to have stdin and/or stdout refer
to a file.
But what if you want input from 2 or more files?
Opening and Closing Files; File Pointers
Before we can specify files in our C programs, we need to learn a
(very) little about the file pointer.
Before a file can be read or written, it must be opened.
The library function fopen() is given two arguments, the
name of the file and the mode
; it returns a file pointer.
Consider the code snippet on the right.
The type FILE is defined in <stdio.h>.
We need not worry about how it is defined.
FILE *fp1, *fp2, *fp3, *fp4;
FILE *fopen(char *name, char *mode);
fp1 = fopen("cat.c", "r");
fp2 = fopen("../x", "a");
fp3 = fopen("/tmp/z", "w");
fp4 = fopen("/tmp/q", "r+");
- The file cat.c in the current directory is opened for
reading and some information about this file is recorded
in *fp1.
- The file x in the parent directory is opened for
appending; x is created if it doesn't exist.
- The file z in /tmp is opened for writing.
Previous contents of z are lost.
- The file q in /tmp is opened for reading and/or
writing.
(When mixing reads and writes, care is needed.)
After the file is opened, the file name is no longer used;
subsequent commands (reading, writing, closing) use the file
pointer.
The function fclose(FILE *fp) breaks the connection
established by fopen().
getc()/putc(): The File Versions of getchar()/putchar()
Just as getchar()/putchar() are the basic
one-character-at-a-time functions for reading and writing
stdin/stdout, getc()/putc() perform the analogous
operations for files (really for file pointers).
These new functions naturally require an extra argument, a pointer
to the file to read from or write to.
Since stdin/stdout are actually file pointers (they are
constants not variables) we have the definitions
#define getchar() getc(stdin)
#define putchar(c) putc((c), stdout)
I think this will be clearer when we do an example, which is our
next task.
An Example cat.c
#include <stdio.h>
main (int argc, char *argv[argc]) {
FILE *fp;
void filecopy(FILE *, FILE *);
if (argc == 1) // NO files specified
filecopy(stdin, stdout);
else
while(--argc > 0) // argc-1 files
if((fp=fopen(*++argv, "r")) == NULL) {
printf ("cat: can't open %s\n", *argv);
return 1;
} else {
filecopy(fp, stdout);
fclose(fp);
}
return 0;
}
void filecopy (FILE *ifp, FILE *ofp) {
int c;
while ((c = getc(ifp)) != EOF)
putc(c, ofp);
}
The name cat is short for catenate, which is short for
concatenate :-).
If cat is given no command line arguments (i.e., if
argc=1), then it just copies stdin to
stdout.
This is not useless: for one thing remember < and
>.
If there are command line arguments, they must all be the names of
existing files.
In this case, cat concatenates the files and writes the
result to stdout.
The method used is simply to copy each file to stdout one
after the other.
The copyfile() function uses the standard
getc()/putc() loop to copy the file specified by its first
argument ifp (input file pointer) to the file specified by
its second argument.
In this application, the second argument is always
stdout so copyfile() could have been simplified to
take only one argument and to use putchar().
Note the check that the call to fopen() succeeded; a very
good idea.
Note also that cat uses very little memory, even if
concatenating 100GB files.
It would be an unimaginably awful design for cat to read
all the files into some ENORMOUS character array
and then write the result to stdout.
7.6: Error Handling—Stderr and Exit
(and Ferror())
Stderr
A problem with cat is that error messages are written to
the same place as the normal output.
If stdout is the screen, the situation would not be too bad
since the error message would occur at the end.
But if stdout were redirected to a file via >,
we might not notice the message.
Since this situation is common there are actually three standard
file pointers defined: In addition to stdin and
stdout, the system defines stderr.
Although the name suggests that it is for errors and that is indeed
its primary application, stderr is really just another file
pointer, which (like stdout) defaults to the screen).
Even if stdout is redirected by the standard >
redirection operator, stderr will still appear on the
screen.
There is also syntax to redirect stderr, which can be used
if desired.
Exit()
As mentioned previously a command should return zero if successful
and non-zero if not.
This is quite easy to do if the error is detected in the
main() routine itself.
What should we do if main() has called joe(),
which has called f(), which has called g(), and
g() detects an error (say fopen() returned
NULL)?
It is easy to print an error message (sent to stderr, now
that we know about file pointers).
But it is a pain to communicate this failure all the way back
to main() so that main() can return a
non-zero status.
Exit() to the rescue.
If the library routine exit(n); is called, the effect is the
same as if the main() function
executed return n.
So executing exit(0) terminates the command normally and
executing exit(n) with n>0 terminates the
command and gives a status value indicating an error.
Ferror()
The library function
int ferror(FILE *fp);
returns non-zero if an error occurred on the stream fp.
For example, if you opened a file for writing and sometime during
execution the file system became full and a write was unsuccessful,
the corresponding call to ferror() would return
non-zero.
7.7 Line Input and Output (fgets() and fputs())
The standard library routine
char *fgets(char *line, int maxchars, FILE *fp)
reads characters from the file fp and stores them plus a
trailing '\0' in the string line.
Reading stops when a newline is encountered (it is read and stored)
or when maxchars-1 characters have been read (hence,
counting the trailing '\0', at most maxchars will be
stored).
The value returned by fgets is line; on end of
file or error, NULL is returned instead.
The standard library routine
int fputs(char *line, FILE *fp)
writes the string line to the file fp.
The trailing '\0' is not written and line need not contain
a newline.
The return value is zero unless an error occurs in which case EOF
is returned.
Start Lecture #12
Remark: Midterm is 25 October.
7.8 Miscellaneous Functions
A laundry list.
I typed them all in to act as convenient reference.
Let me know if you find any errors.
The integer type size_t
This subsection represents a technical point; for this class you
can replace size_t by int.
Consider the return type of strlen(), which the length of
the string parameter.
It is surely some kind of integral type but should it be
short int, int, long int or one of
the unsigned flavors of those three?
Since lengths cannot be negative, the unsigned versions
are better since the maximum possible value is twice as large.
(On the machines we are using int is at least 32-bits long
so even the signed version permits values exceeding two billion,
which is good enough for us).
The two main contenders for the type of the return value from
strlen() are unsigned int and
unsigned long int.
Note that long int can be, and usually is, abbreviated
as long.
If you make the type too small, there are strings whose length you
cannot represent.
If you make the type bigger than ever needed, some space is wasted
and, in some cases, the code runs slower.
Hence the introduction of size_t, which is defined in
stdlib.h.
Each system specifies whether size_t is
unsigned int or unsigned long (or something
else).
For the same reason that the system-dependent type size_t is
used for the return value of strlen, size_t is
also used as the return type of the sizeof operator and is
used several places below.
7.8.1 String Operations
These are from string.h, which must be #include'd.
The versions with n added to the name limit the operation to
n characters.
In the following table n is of type size_t and
c is an int containing a character;
s and t are strings (i.e., character pointers,
char *); and cs and ct are
constant strings (const char *).
In addition to the naming distinction s vs cs, I
further indicated which inputs may be modified by writing the string
name in red.
| Call | Meaning |
|---|
| strcat(s,ct) |
Concatenate ct on to the end of c
(changing s) and return s. |
| strncat(s,n,ct) |
The same but concatenates no more than n characters. |
| strcmp(cs,ct) |
Compare s and t lexicographically.
Returns a negative, zero, or positive int if
s is respectively <, =, or
> t |
| strncmp(cs,ct,n) |
The same but compares no more than n characters. |
| strcpy(s,ct) |
Copy ct to s and return s. |
| strncpy(s,ct,n) |
Similar but copies no more than n characters and
pads with '\0' if ct has fewer than n
characters.
The result might NOT be '\0'
terminated. |
| strlen(cs) |
Returns the length of cs (not including the
terminating '\0') as a size_t value. |
| strchr(cs,c) |
Returns a pointer to the first
c in s or NULL if c is not
in cs. |
| strrchr(cs,c) |
Returns a pointer to the last
c in cs or NULL if c is not
in cs. |
7.8.2 Character Testing and Conversion
These are from ctype.h, which must be
#include'd.
All these functions take an integer argument (representing a
character or the value EOF) and return an integer.
| Call |
Meaning |
| isalpha(c) |
Returns true (non-zero) if (and only if)
c is alphabetic .
In our locale this means a letter. |
| isupper(c) |
Returns true if c is upper case. |
| islower(c) |
Returns true if c is lower case. |
| isdigit(c) |
Returns true if c is a digit. |
| isalnum(c) |
Returns true if isalpha(c)
or isdigit(c). |
| toupper(c) |
Returns c converted to upper case if c is a
letter; otherwise returns c. |
| tolower(c) |
Returns c converted to lower case if c is a
letter; otherwise returns c. |
7.8.3 Ungetc
int ungetc(int c, FILE *fp) pushes back
to the
input stream the character c.
It returns c or EOF if an error was
encountered.
Only one character can be pushed back, i.e., it is not safe to call
ungetc() twice without an call in between that consumes the
first pushed back character.
This function is from stdio.h, which must be
#include'd.
7.8.4 Command Execution
#include <stdio.h>
#include <stdlib.h>
int main (int argc, char *argv[argc]) {
int status;
printf("Hello.\n");
status = system("dir; date");
printf("Goodbye: status %d\n", status);
return 0;
}
The function system(char *s) runs the command contained in
the string s and returns an integer status.
The contents of s and the value of the status is system
dependent.
On my system, the program on the right when run in a directory
containing only two files x and y produced the
following output.
Hello.
x y
Sun Mar 7 16:05:03 EST 2010
Goodbye: status 0
This function is in stdlib.h, which must be
#include'd.
7.8.5 Storage Management
Malloc()
We have already seen
void *malloc(size_t n)
which returns pointer to n bytes of uninitialized storage.
If the request cannot be satisfied, malloc() returns
NULL.
Calloc()
The related function
void *calloc(size_t n, size_t size)
returns a pointer to a block of storage adequate to hold an array
of n objects each of size size.
The storage is initialized to all zeros.
Free()
The function
void free (void *p)
is used to return storage obtained from malloc()
or calloc().
Remarks
for (p = head; p != NULL; p = p->next)
free(p);
for (p = head; p != NULL; p = q) {
q = p-> next;
free (p);
}
- It is crucial that the pointer argument to free() was
obtained by a call to malloc() or calloc()
(or realloc(), which we shall not use).
- Equally bad is to reference space after free'ing it.
For example the code on the top right is buggy since
p->next uses the p that has just been
free'd.
Instead the bottom loop should be used.
- The two arguments to calloc() are not silly.
You cannot simply multiply them to determine the amount of storage
needed due to padding requirements.
Indeed, the space needed is system dependent.
- The pointers returned by malloc() and calloc
are properly aligned, but must be cast to the appropriate
type.
7.8.6 Mathematical Functions
These functions are from math.h, which must be
#include'd.
In addition (at least on on my system and i5.nyu.edu) you must
specify a linker option to have the math library linked.
If your mathematical program consists of A.c and B.c and the
executable is to be named prog1, you would write
cc -o prog1 -l m A.c B.c
All the functions in this section have double's as
arguments and as result type.
The trigonometric functions express their arguments in radians and
the inverse trigonometric functions express their results in
radians.
| Call |
Meaning |
|---|
| sin(x) |
sine |
| cos(x) |
cosine |
| atan(x) |
arctangent |
| exp(x) |
exponentialex |
| log(x) |
natural logarithm loge(x) |
| log10(x) |
common logarithm log10(x) |
| pow(x,y) |
xy |
| sqrt(x) |
square root, x≥0 |
| fabs(x) |
absolute value |
7.8.7 Random Number Generation
Random number generation (actually pseudo-random number generation)
is a complex subject.
The function rand() given in the book is an early and not
wonderful generator; it dates from when integers were 16 bits.
I recommend instead (at least on linux and i5.nyu.edu)
long int random(void)
void srandom(unsigned int seed)
The random() function returns an integer between 0 and
RAND_MAX.
You can get different pseudo-random sequences by starting with a
call to srandom() using a different seed.
Both functions are in stdlib.h, which must be
#include'd.
On my linux system RAND_MAX (also in stdlib.h) is defined
as 231-1, which is also INT_MAX, the largest
value of an int.
It looks like i5.nyu.edu doesn't define RAND_MAX, but does use the
same psuedo-random number generator.
Remark: Let's write some programs/functions.
- Write a program (most-vowels) that reads lines and prints the
one with the most vowels together with a count of how many
vowels it contains.
- Write a function (repstr) that accepts a count and a string
and returns a newly allocated string containing the
concatenation of the original string the specified number of
times.
- Write a function (mergeint) that merges two sorted arrays of
integers A and B into C.
The signature is
mergeInt(int n, int m, int A[n], int B[m], int C[n+m]);
- Think about how to do this for arrays of (varying length)
strings.
- The 5 -> 16 -> 8 -> 4 -> 2 -> 1 game.
- Write a function f giving the next number:
f(5)=16; f(1)=4.
What should the signature be?
- Write a program that repeatedly reads an integer and
prints out the generated sequence upto 1.
- Modify the previous program to instead accept three
arguments, which act like the three parts of a for.
The program plays the game for all integers starting at the
first argument, incrementing by the third, up to the
second.
- Modify the previous to accept an optional -b or
--brief argument.
If present, don't print the sequence, instead just print its
length.
- Modify the previous to accept an optional -s or
--summary argument that prints only the number
having the longest sequence and the sequence (OK to
re-calculate).
If the -b is also present, just print the number
and the length of the sequence (not OK to recalculate).
Remark: End of material to be covered on the
midterm exam.
Review of solutions to practice midterm.
Chapter O'H-2 Representing and Manipulating Information
O'H-2.1 Information Storage
Computers are Inherently Binary Machines
Modern electronics can quickly distinguish 2 states of an
electric signal: low voltage and high voltage.
Low has always been around 0 volts; high was 5 volts for a long
while now is below 3.5 volts.
Since this is not a EE course we will abstract the situation and
say that a signal is in one of two states, low (a.k.a. 0) and high
(a.k.a. 1).
Binary Notation
decimal
base 10 |
binary
base 2 |
base 4 |
octal
base 8 |
hex
base 16 |
| 0 | 0 | 0 | 0 | 0 |
| 1 | 1 | 1 | 1 | 1 |
| 2 | 10 | 2 | 2 | 2 |
| 3 | 11 | 3 | 3 | 3 |
| 4 | 100 | 10 | 4 | 4 |
| 5 | 101 | 11 | 5 | 5 |
| 6 | 110 | 12 | 6 | 6 |
| 7 | 111 | 13 | 7 | 7 |
| 8 | 1000 | 20 | 10 | 8 |
| 9 | 1001 | 21 | 11 | 9 |
| 10 | 1010 | 22 | 12 | A |
| 11 | 1011 | 23 | 13 | B |
| 12 | 1100 | 30 | 14 | C |
| 13 | 1101 | 31 | 15 | D |
| 14 | 1110 | 32 | 16 | E |
| 15 | 1111 | 33 | 17 | F |
| 16 | 10000 | 100 | 20 | 10 |
Since for us a signal can be in one of two states, it is convenient
to use binary (a.k.a. base 2) notation.
That way if we have three signals with the first and third high and
the middle one low, we can represent the situation using 3 binary
digits, specifically 101.
Recall that to calculate the numeric value of a ordinary (base 10,
i.e., decimal) number the right most digit is multiplied by
100=1 the next digit to the left by 101=10,
the next digit by 102=100, etc.
For example 6205 = 6*103 + 2*102 +
0*101 + 5*100 = 6*1000 + 2*100 + 0*10 +5*1.
Similarly binary numbers work the same way so, for example the
binary number 11001 has value (written in decimal)
1*24 + 1*23 + 0*22 +
0*21 + 1*22 = 1*16 + 1*8 + 0*4 + 0*2 +1*1
= 16+8+1 = 25.
We normally use decimal (i.e., base 10) notation where each digit
is conceptually multiplied by a power of 10.
We all know about the ten's place
, hundred's place
,
etc.
The feature that the same digit is valued 1/10 as much if it is one
place further to the right continues to hold to the right of the
decimal point.
Computer hardware uses binary (i.e., base 2) arithmetic so to
understand hardware features we could write our numbers in binary.
The only problem with this is that binary numbers are long.
For example, the number of US senators would be written 1100100 and
the number of miles to the sun would need 25 bits (binary
digits).
This suggests that decimal notation is more convenient.
The problem with relying on decimal notation is that we need binary
notation to express multiple electrical signals and it is difficult
to convert between decimal and binary because ten is not an integral
power of 2.
The table on the right (for now only look at the first two columns)
shows how we write the numbers from 0 to 16 in both base 10 and
base 2.
O'H-2.1.1 Hexadecimal Notation
A Base 4 Compromise?
Base 10 is familiar to us, which is certainly an enormous
advantage, but it is hard to convert base 10 numbers to/from base 2
and we need base 2 to express hardware circuits.
Base 2 corresponds well to the hardware but is verbose for large
numbers.
Let's try a compromise, base 4.
To convert between base four and base two is easy since the four
base 4 digits
(I hate that expression, for me digit means
base 10) correspond exactly to the four possible pairs of bits.
base 4 bits
0 00
1 01
2 10
3 11
Look again at the table above but now concentrate on columns two
and three.
We see that it is easy to convert back and forth between base 2 and
base 4.
But base 4 numbers are still a little long for comfort: a number
needing n bits would use ⌈n/2⌉ base four digits.
A base 8 number would need ⌈n/3⌉ digits for an n-bit
base 2 number because 8=23 and a base 16 number would
need ⌈n/4⌉.
Base 8 (called octal) would be good, and was used when I learned
about computers; base 16 is used now.
Question: Why the switch from 8 to 16?
Answer: Words in a 1960s computer had 36 bits and
36 is divisible by 3.
Words in modern computers have 32 bits and 32 is divisible by 4.
(Recently the word size has increased to 64 bits, but 64 is also
divisible by 4.)
Question: Why 36-bit words?
Answer: six 6-bit characters per word.
Base 16 is called hexadecimal.
We need 16 symbols for the 16 possible digits; the first 10 are
obvious 0,1,...,9.
We need 6 more to represent ten, eleven, ..., fifteen.
We use A, B, C, D, E, F to represent the extra 6 digits
and when we write a hexadecimal number we precede it with 0x.
The Big Advantage of Base 16 Over Base 10
You convert base 16 to/from binary one hexadecimal digit (4 bits)
at a time.
For example
1011000100101111 = 1011 0001 0010 1111 = B 1 2 F = 0xB12F
Look again at the table above right and notice that groups of four
bits do match one hex digit.
The Downside
You need to learn that A3 + 3B = DE and
FF + BB = 1BA.
O'H-2.1.2 Data Sizes
Although fundamentally hardware is based on bits, we will normally
think of it as byte oriented.
A byte (or octet) consists of 8 bits or two hex characters.
As we learned, the primitive types in C (char, int, double, etc) are
a multiple of bytes in size.
In fact, the multiple is a power of 2 so variables (and hence data
items) are 1, 2, 4, 8, or 16-bytes long.
An Example
#include <string.h>
#include <stdio.h>
void showBytes (unsigned char *start, int len) {
int i;
for (i=0; i<len; i++)
printf("%p %5x%5x\n", start+i, *(start+i), start[i]);
}
int main(int argc, char *argv[]) {
showBytes(argv[1], strlen(argv[1]));
}
The simple program on the right prints its first argument in
hex.
Actually it does a little more, it prints the address of each
character of the first argument and then the hex value of the
character twice once in pointer style and once in array style.
A sample run follows.
sh-4.4$ ./a.out iB4e
0x7ffe3f4af516 69 69
0x7ffe3f4af517 42 42
0x7ffe3f4af518 34 34
0x7ffe3f4af519 65 65
sh-4.4$
Note that capital letters come before lower case and digits come
before either.
Those are properties of ASCII and (I believe) unicode.
O-H'2.1.3 Addressing and Byte Ordering
We think of memory as composed of 8-bit bytes and the bytes in
memory are numbered.
So if you could find a 1KB (kilobyte) memory you could address the
individual bytes as byte 0, byte 1, ... byte 1023.
If you numbered them in hexadecimal it would be byte 0 ... byte
3FF.
As we learned a C-language char takes one byte of storage
so its address would be one number.
A 32-bit integer requires 4 bytes.
I guess one could imagine storing the 4 bytes spread out in memory,
but that isn't done.
Instead the integer is stored in 4 consecutive bytes, the
lowest of the four byte addresses is the address of the integer.
Normally, integers are aligned i.e, the lowest address is
a multiple of 4.
On many systems a C-language double occupies 8 consecutive
bytes the lowest numbered of which is a multiple of 8.
Start Lecture #13
Little Endian vs. Big Endian
Let's consider a 4-byte (i.e., 32-bit) integer N that is
stored in the four bytes having address 0x100-0x103.
The address of N is therefore 0x100, which is a multiple of
4 and hence N is considered aligned.
Let's say the value of N in binary is
0010|1111|1010|0101|0000|1110|0001|1010
which in hex
(short for hexadecimal) is 0x2FA50E1A.
So the four bytes numbered 100, 101, 102, and 103 will contain 2F A5
0E 1A.
However, a question still remains: Which byte contains which pair of
hex digits?
Unfortunately two different schemes are used.
In little endian order the least significant byte is put in
the lowest address; whereas in big endian order the most
significant byte is put in the lowest address.
Consider storing in address 0x1120 our 32-bit (aligned) integer,
which contains the value 0x2FA50E1A.
A little endian machine would store it this way.
byte address 0x1120 0x1121 0x1122 0x1123
contents 0x1A 0x0E 0xA5 0x2F
In contrast a big endian machine would store it this way.
byte address 0x1120 0x1121 0x1122 0x1123
contents 0x2F 0xA5 0x0E 0x1A
int main(int argc, char *argv[]) {
int a = 54321;
showBytes((char *)&a, sizeof(int));
}
An Example Using showBytes()
On the right is an example using
the showBytes() routine defined just above that gives (in
hex) the four bytes in the integer 54321.
The output produced is
0x7ffd0a0ed8f4 31 31
0x7ffd0a0ed8f5 d4 d4
0x7ffd0a0ed8f6 0 0
0x7ffd0a0ed8f7 0 0
So the four bytes are 0x31, 0xD4, 0x0, and 0x0.
If the number in hex is 31 D4 00 00 it would
be much bigger than 54321 decimal.
Instead the number is 00 00 D4 31 hex which does equal 54321
decimal.
So my laptop is little endian (as are all x86 processors).
O'H-2.1.4 Representing Strings
As we know a string is a null terminated array of chars; each char
occupies one byte.
Given the string "tom", the char 't' will occupy one byte, 'o' will
occupy the next (higher) byte, 'm' will occupy the next byte and
'\0' the next (last) byte.
There is no issue of byte ordering (endian) since each character
is stored in one byte and consecutive characters are stored in
consecutive bytes.
O-H'2.1.5 Representing Code
O'H-2.1.6 Introduction to Boolean Algebra
Now we know how to represent integers and characters in terms of
bits and how to write each using hexadecimal notation.
But what about operations like add, subtract, multiply, and
divide.
We will approach this slowly and start with operations on
individual bits, operations like AND and OR.
To define addition for integers you need to give a procedure or
adding 2 numbers, you can't simply list all the possible addition
problems since there are an infinite number of integers.
However there are only 2 possible bits and hence for a binary (i.e.,
two operand) operation on bits there are only four possible examples
and we simply list all four possible questions and the corresponding
answers.
This list is normally called a truth table.
The following diagram does this for six basic operations.
Just below the truth tables are the symbols used for each operation
when drawing a diagram of an electronic circuit
(a circuit diagram
).

O'H-2.1.7 Bit-Level Operations in C
| ~A | NOT A |
| A&B | A AND B |
| A|B | A OR B |
| A^B | A XOR B |
C directly supports NOT, AND, OR, and XOR as shown on the table to
the left and mentioned previously in section 2.9.
Note that these operations are bit-wise.
That is, bit zero of the result depends only on bit zero of the
operand(s), bit one of the result depends only on bit one of the
operands, etc.
C does not have explicit support for NAND or for NOR.
It turns out that if you have enough chips that compute only NAND,
you are able to wire them together to support any
Boolean function.
We call NAND universal for this reason.
This is also true of NOR but it is not true of any other two input
primitive.
O'H'2.1.8 Logical Operations in C
Done previously.
Be careful not to confuse bit-level AND (&) with logical AND
(&&).
The latter treat any nonzero value as TRUE, and zero as FALSE.
Similarly for bit-level OR (|) and logical OR (||).
Note, for example that !0x00 = 0x01; whereas ~0x00=0x11.
Also remember that C guarantees short-circuit
evaluation of
&& and ||.
In particular ptr&&*ptr cannot generate a null
pointer exception since, when ptr is null, *ptr is
not evaluated.
Boolean in C
This was introduced in C99 so is not in the text.
You may use it, but it is not required for the course.
O'H-2.1.9 Shift Operations in C
In C, the expression x<<b
shifts x b bits to the left.
The b most left bits of x are lost and
the b right most bits of x become 0.
There is a corresponding right shift >> but there is a
question on what to do with the sign bit.
More on this later.
O'H-2.2 Integer Representations
O'H-2.2.1 Integral Data Types
Computer integers come in several sizes and two flavors
.
A char is a 1-byte integer; a short is a 2-byte
integer; and an int is a 4-byte integer.
The size of a long is system dependent.
It is 4 bytes (32 bits) on a 32-bit system and 8 bytes (64 bits) on
a 64-bit system.
What about the two flavors
?
That comes next.
O'H-2.2.2 Unsigned Encodings
Let's talk only about short; the others are essentially
the same only bigger.
So we have 16 bits in each integer representing from right to left
20 to 215.
If all these 16 bits are 1s, the value is 216-1 = 65,535.
Question: Why?
Answer: Draw it on the board.
In a sense these encodings are the most natural.
They are used and they well supported in the C language.
Naturally the sum of the two very big 16-bit unsigned numbers would
need 17 bits; this is called overflow.
Nonetheless, the situation is good for unsigned addition:
- Just add and it works, except for overflow.
- Just subtract the smaller from the bigger and it works (overflow
is impossible).
- Just multiply and it works, except for overflow.
- Just divide (not by 0) and it works (overflow is impossible)
But there is a problem.
Unsigned encodings have no negative numbers.
O'H-2.2.3 Two's-Complement Encoding
To include negative numbers there must be a way to indicate the
sign of the number.
Also since some numbers will be negative and we have the same number
of numbers (because we sill have 16 bits), there will be
fewer positive numbers for short than we had for
unsigned short.
Before specifying how to represent negative numbers, let's do the
easy case of non-negative numbers (i.e., positive and zero).
For non-negative numbers set the leftmost bit to zero and use the
remaining bits as above.
Since the left bit (the high order bit or HOB) is for the sign we
have one fewer for the number itself so the largest short is zero
with 15 ones, which is 215-1 = 32,767.
We could do the analogous technique for negative
numbers: set the HOB to 1 and use the remaining 15 bits for the
magnitude (the absolute value in mathematics).
This technique is called the sign-magnitude
representation
and was used, but is not common now.
One annoyance is that you have two representations of zero
0000000000000000 and 1000000000000000.
We will not use this encoding.
Instead of just flipping the leftmost (or sign) bit as above we
form the so-called 2s-complement.
For simplicity I will do 4-bit two's complement and just talk about
the 16-bit analogue (and 32- and 64-bit analogues), which is
essentially the same.
4-bit Twos's Complement Numbers
With 4 bits, there are 16 possible numbers.
Since twos complement notation has one representation for each
number, there are 15 nonzero values.
Since there are an odd number of nonzero values, there
cannot be the same number of positive and negative
values.
In fact 4-bit two's complement notation has 8 negative values
(-8..-1), and 7 positive values (1..7).
(In sign magnitude notation there are the same number of positive
and negative values, but there are two representations for zero,
which is inconvenient.)
The high order bit (hob) on the left is the sign bit.
The sign bit is zero for positive numbers and for the number zero;
the sign bit is one for negative numbers.
Zero is written simply 0000.
1-7 are written 0001, 0010, 0011, 0100, 0101, 0110, 0111.
That is, you set the sign bit to zero and write 1-7 using the
remaining three lob's (low order bits).
This last statement is also true for zero.
-1, -2, ..., -7 are written by taking the two's complement
of the corresponding positive number.
The two's complement is computed in two steps.
- Take the (ordinary) complement, i.e. change ones to zeros and
zeros to ones.
This is sometimes called the one's complement.
For example, the (4-bit) one's complement of 3 is 1100.
- Add 1.
For example, the (4-bit) two's complement of 3 is 1101.
If you take the two's complement of -1, -2, ..., -7, you get back
the corresponding positive number.
Try it.
If you take the two's complement of zero you get zero.
Try it.
What about the 8th negative number?
-8 is written 1000.
But if you take its (4-bit) two's complement, you
must get the wrong number because the correct
number (+8) cannot be expressed in 4-bit two's complement
notation.
Two's Complement Addition and Subtraction
Amazingly easy (if you ignore overflows).
- Addition: Just add the two 4-bit numbers, do NOT
treat the sign bit in a special way, and discard any final
carry-out.
- Subtraction: Take the two's complement of the subtrahend (the second
number) and add as above.
Comments on Two's Complement
You could reasonably ask what does this funny notation have to do
with negative numbers.
Let me make a few comments.
Question: What does -1 mean mathematically?
Answer: It is the unique number that, when added
to 1, gives zero.
Our representation of -1 does do this (using regular binary
addition and discarding the final carry-out) so we do have -1
correct.
Question: What does negative n
mean, for n>0?
Answer: It is the unique number that, when
added to n, gives zero.
The 1s complement of n when added to n gives
all 1s, which is -1.
Thus the 2s complement, which is one larger, will give zero, as
desired.
Size Ranges for 16-bit Numbers
| Width (bits) |
|---|
| 8 | 16 | 32 | 64 |
|---|
Unsig
Max | 255 | 65,535 |
4,294,967,295 | 18,446,744,073,709,551,615 |
|---|
Signed
Max | 127 | 32,767 |
2,147,483,647 | 9,223,372,036,854,775,807 |
Signed
Min | -128 | -32,768 |
2,147,483,647 | -9,223,372,036,854,775,808 |
| Decimal | Hex | Binary |
Unsigned
Max | 65535 | FF FF |
11111111 11111111 |
Unsigned
Min | 0 | 00 00 | 00000000 00000000 |
Signed
Max | 32767 | 7F FF |
01111111 11111111 |
Signed
Min | -32768 | 80 00 |
10000000 00000000 |
| -1 | -1 | FF FF | 11111111 11111111 |
The table on the near right shows the extreme values for both
unsigned and signed 16-bit integers.
It the signed case we also show the representation of -1
(there is no unsigned -1).
Note that the signed values all use the twos-complement
representation.
In fact I doubt we will use sign/magnitude (or ones'-complement) for
integers any further.
The table on the far right shows the max and min values for
various sizes of integers (1, 2, 4, and 8 bytes).
Start Lecture #14
O'H-2.2.4 Conversions between Signed and Unsigned
General rule: Be Careful!
.
O'H-2.2.5 Signed versus Unsigned in C
#include <stdio.h>
int main(int argc, char *argv[]) {
int i1=-1, i2=-2;
unsigned int u1, u2=2;
u1 = i1; // implicit (unsigned)
printf("u1=%u\n", u1);
printf( "%s\n", (i2>u2) ? "yes" : "no");
return 0;
}
The code in the right illustrates why we must be careful when
mixing unsigned and signed values.
The fundamental rule that is applied in C when doing such
conversions (actually called casts) is that the bit pattern
remains the same even though this sometimes means
that the value changes.
When the code on the right is executed, the output is
u1=4294967295
yes
When the code executes u1=i1, the bits in i1 are
all ones and this bit pattern remains the same when the value is
cast to unsigned and placed in u1.
So u1 becomes all 1s which is a huge number as we see in
the output.
When we compare i2>u2, either the -2 in i2
must be converted to unsigned or the 2 in u2 must be
converted to signed.
The rule in C is that the conversion goes to unsigned so the -2 bit
pattern in i2 is reinterpreted as an unsigned value.
With that interpretation i2 is indeed much bigger that the
2 in u2.
O'H-2.2.6 Expanding the Bit Representation of a Number
We have just seen signed/unsigned conversions.
How about short to int or int to long?
How about unsigned int to unsigned long?
I.e., converting when the sizes are different but
the signedness
is the same.
- Converting one unsigned integer to a longer one:
Pad the shorter value on the left with zeros.
- Converting one signed integer to a longer one: sign extend the
shorter.
That is, propagate the sign bit of the shorter to the left to give
the length of the longer
Summary of Conversion Ordering
In summary C converts in the following order.
That is, types on the left are converted to types on the right.
int →
unsigned int →
long →
unsigned long →
float →
double →
long double.
O'H-2.2.7 Truncating Numbers
What if you want to put an int into a short or
put a long into an int?
Bits are simply dropped from the left, which can alter both the
value and the sign.
Advice: Don't do it.
O'H-2.2.8 Advice on Signed versus Unsigned
Be careful!!
O'H-2.3 Integer Arithmetic
O'H-2.3.1 Unsigned Addition
The only problem is overflow, i.e., where the addends use all the
bits and hence the sum requires one more.
When there is no overflow, addition is conceptually done right to
left one bit at a time with carries just like we do for base 10.
In reality very clever tricks are used to enable
multiple bits to be added at once.
You could google ripple carry
and carry lookahead
or
my lecture notes for computer architecture.
O'H-2.3.2 Two's-Complement Addition
The news is very good—you just add as though it were
unsigned addition and throw out any carry-out from the HOB (high
order bit).
Only overflow is a problem (as it was for unsigned).
O-H-2.3.3 Two's Complement Negation
Recall that with two's complement there is one more negative number
than positive number.
In particular, the most-negative number has no positive counterpart.
Specifically, for n-bit twos complement numbers, the range of values
is
most neg = -2n-1 ... 2n-1-1 = most pos
For every value except the most neg, the negation is obtain by
simply taking the two's complement, independent of whether the
original number was positive, negative, or zero.
O;H-2.3.4 Unsigned Multiplication
Multiply the two n-bit numbers, which gives 2n-bits and discard the
n HOBs.
Again, the only problem is overflow.
O'H-2.3.5 Two's Complement Multiplication
A surprise occurs.
You just mulitply, the twos complement numbers and truncate the
HOBs and ... it works—except for overflow.
Start Lecture #15
Midterm Exam
Start Lecture #16
Remark: Reviewed midterm answers.
O'H-2.3.6 Multiplying by Constants
You can multiply x*2k by just forming x<<k.
This is reasonably clear for x≥0, but works for 2s complement as
well.
Note that compilers are clever and utilize identities like
x * 24 = x * (32-8) = x*32 - x*8 = x<<5 - x<<3
O'H-2-3-7 Dividing by Powers of 2
Right shift by k does divide by 2k.
Actually it gives the floor of the division.
If the value is unsigned, use logical right shift; if it is
signed use arithmetic right shift.
O'H-2.3.8 Final Thoughts on Integer Arithmetic
Unsigned
Addition and multiplication work unless there is an overflow.
Adding two n-bit unsigned numbers gives (up to) an (n+1)-bit
result, which we fit into n bits by dropping the HOB.
So you get an overflow if the HOB of the result is 1
Multiplying two n-bit unsigned numbers gives (up to) a 2n-bit
result, which we fit into n bits by dropping the n HOBs.
So you get an overflow if any of the n HOBs of the result are 1.
Two's Complement.
Same idea but detecting overflow is more complicated.
For addition of n-bit numbers, which includes subtraction, the
non-obvious rule is that an overflow occurs if the carry into the
HOB (bit n-1) != the carry-out from that bit.
Start Lecture #17
O'H-2.4 Floating Point
2.4.1 Fractional Binary Numbers
Exactly analogous to decimal numbers with a decimal point.
Just as 0.01 in decimal is one-hundredth, 0.01 in binary is
one-quarter and 0x0.01 is one-twohundredfiftysixth.
Why Not Used
Fractional binary notation requires considerable space for numbers
that are very large in magnitude or very near zero.
5 * 2100 = 1010000000...0
| 100 0s |
-2-100 = -0.00000000001
| 100 0s |
(The second example above uses sign-magnitude.
But this problem comes up in science all the time and the solution
used is often called scientific notation
.
Avagadro's number ~ 6.02 * 1023
Light year ~ 5.88 * 1012 miles
The coefficient is called the mantissa or significand.
In computing we use IEEE floating point, which is basically the
same solution but with an exponent base of 2 not 10.
As we shall see there are some technical differences.
2.4.2 IEEE Floating-Point Representation
Represent a floating number as
(-1)s × M × 2E
Where
- s (for sign) determines if the number is positive or
negative.
- M (possibly for mantissa) is called the significand.
It is a fractional value related to fractional binary numbers
above.
- E (for exponent) weights the value by a (possibly negative)
power of 2.
Naturally, s is stored in one bit.
For single precision (float in C) E is stored 8 bits and M is
stored in 23.
Thus, a float in C requires 1+8+23 = 32 bits.
For double precision (double in C) E is stored in 11 bits and M in
52.
Thus, a double in C requires 1+11+52 = 64 bits.
Now it gets a little complicated; the values stored are not simply
E and M and there are 3 classes of values.
The Exponent as Stored
Lets just do single precision, double precision is the same idea
just with more bits.
The number of bits used for the exponent is 8
Although the exponent E itself can be positive, negative, or zero
the value stored exp is unsigned.
This is accomplished by biasing the E (i.e., adding a constant so
the result is never negative).
With 8 bits of exponent, there are 256 possible unsigned values for
exp, namely 0...255.
We let E = exp-127 so the possible values for E are -127...128.
Stated the other way around, the value stored for the exponent is
the true exponent +127.
The Significand as Stored
With scientific notation we write numbers as, for example.
9.4534×1012.
An analogous base 2 example would be
1.1100111×210.
Note that in 9.4535 the four digits after the decimal point each
distinguish between 10 possibilities whereas the digit before the
decimal point only distinguishes between 9 possibilities, so is not
fully used
.
Note also that in 1.1100111 the 1 to the left distinguishes
between one possibility, i.e. is useless.
IEEE floating point does not store the bit to the right of the
binary point because is always 1 (actually see below for the other
two classes of values
).
An Example (Single Precision, 32 Bits)
Let F = 15213.010
= 111011011011012
= 1.11011011011012×213
fract stored = 110110110110100000000002
exp stored = 13+127 = 140 = 100011002
sign stored = 0
value stored = 0 10001100 11011011011010000000000
Denormalized (Subnormal) Encoding
Used when the stored exponent is all zeros, i.e., when the exponent
is as negative as possible, i.e., when the number is very close to
0.0.
The value of the significant and exponent in terms of the stored
value is slightly different.
Note there are two zeros since ieee floating point is basically
sign magnitude.
Special Values Encoding
Used when the stored exponent is all ones, i.e., when the exponent
is a large as possible.
If the significand stored is all zeros, the value represents
infinity (positive or negative
), for example overflow when
doing 1.0/0.0.
If the significand is not all zero, the value is called NaN for
not-a-number.
It is used in cases like sqrt(-1.0), infinity - infinity, infinity
× 0.
Summary
IEEE floating point represents numbers as (-1)s ×
M × 2 E.
There are extra complications to store the most information in a
fixed number of bits.
Start Lecture #18
Chapter 7 Linking
The linking material below does not follow the book.
7.A The Big Picture: What is the Problem?
file main.c
#include <stdio.h>
int x = 10;
void f(void);
int main(int argc, char *argv[]) {
printf("main says x is %d\n", x);
f();
}
file f.c
#include <stdio.h>
extern int x;
void f(void) {
int y = 20;
printf("f says x is %d\n", x);
printf("f says y is %d\n", y);
}
For a simple example of what the linker needs to do, consider the
small example on the right consisting of two files main.c
and f.c.
- When compiling main.c, the compiler does not know the
contents of f.c.
In particular it does not know how big the resulting compiled code
for f() will be.
Since it doesn't know how much room to leave for f(), it
leaves no room and assumes that main() starts at the
beginning of the compiled code.
- Similarly, when compiling f.c the size
of main.c is not known so the compiler assumes
that f() is at the beginning of the compiled code.
- At least one of these assumptions must be wrong!
One of the functions will have to come after the other one.
- Put another way the local addresses generated by the compiler
when compiling each file are based on the starting address for
that compilation.
In each case this base address is assumed to be zero (or some
other constant) which can't be right for both compilations.
- The terminology used is that these address
are relative to the base address for the given
compilation.
- The linker sees the (compiled version of) both files and
decides which goes first, second, etc.
- Assuming the module to be placed first starts at the beginning
of memory, the absolute address for each local
address in that module is equal to its relative address.
- For the module to be placed second, the size of the first module
must be added to each relative address to obtain the corresponding
absolute address.
- So one task for the linker is to
relocate relative addresses into the
corresponding absolute addresses.
- The second problem to be solved is that when
compiling main.c the compiler does not know where the
function f() will be loaded and when
compiling f.c the compiler does not know where x
will be loaded.
- In both cases the symbol in question
is external to the module being loaded and the
loader is required to
resolve external addresses.
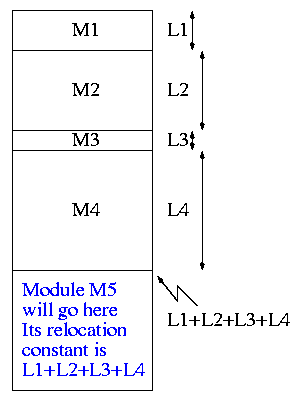
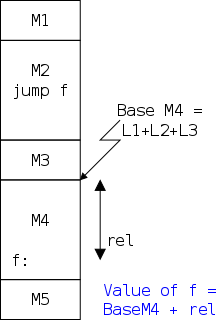
The diagram on the far fight illustrates relocating relative
addresses.
Specifically it shows how to calculate the relocation constant as
the sum of the lengths of the preceding modules.
Once the relocation constant C is known, each absolute address is
calculated simply as the corresponding relative address + C.
The diagram on the near right illustrates resolving external
references.
In this case the reference is to f().
Note that the Base of M4 is the same as its relocation constant,
i.e., the sum of the lengths of the preceding modules.
7.A.1 Two Passes Help
Note from the diagram on the near right, that the linker
encounters the required address jump f
before it knows the
necessary relocation constant.
The simplest solution (but not the fastest) is for the linker to
make two passes over the modules.
During pass 1 the relocation constants for each module are
determined.
During pass 2, the external address are resolved using the
relocation constants determined during pass 2.
7.A.2 Why Not Have the Compiler Do All This?
It could and by some definitions of the compiler
it
does.
For the example at the beginning of this section, we could type
simply
cc main.c f.c; ./a.out
and everything works.
This is because cc includes running the linker.
More significantly, the linker could be built into the compiler if
you wanted to always compile the entire program at once, which you
don't.
Remember that the entire program includes printf().
7.A.3 The Compilation Process
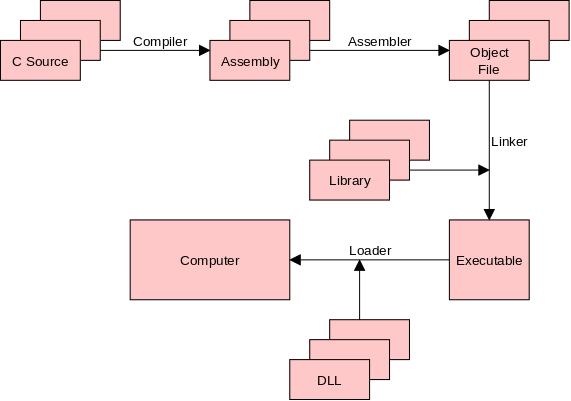
One could think of the assembler as part of the compiler in which
case the diagram would lack the boxes and arrow labeled
assembly/assembler.
Alternatively one could notice that some compilers have two stages:
first C is compiled to an intermediate language, which in the second
stage is converted to assembler.
The diagram would then include an extra set of boxes for the first
stage output and there would be two compiler arrows (stage1 and
stage2).
In the original diagram as well as in these two alternatives the
compiler only does one module at a time and the linker is needed to
combine the results.
7.A.4 Some Rules
Recall that declarations give the type of an identifier; they tell
the compiler how to interpret the identifier; they do not
necessarily reserve space for the identifier.
Declarations that reserve storage are called definitions.
file f1.c
int svar=5;
int sfun1(int x) {
code
}
file f2.c
int wvar1;
int wfun1(int z);
int sfun2(void) {
int igsym1=3;
}
- External definitions are considered strong symbols
by the linker
- External declarations are considered weak symbols
by the linker
- Internal declarations or definitions are not considered at all
by the linker.
Looking at the code on the right, functions sfun1()
and sfun2() and variable svar1 are each strong
symbols.
In contrast wsym1 and wfun1() are weak symbols.
Finally, igsym1 is ignored (actually not seen) by the
linker.
The linker obeys the following rules.
- There can be only one strong symbol with a given name.
If more than one strong symbol has the same name, the linker
reports a
multiply defined symbol
error.
- If there are one of more weak symbols with the same name as a
strong symbol, the linker resolves all references to the symbol
name to the strong symbol.
- If there are one or more weak symbols with the same name, but
no strong symbol with that name, the linker picks one of the weak
symbols and resolves all references to that one.
7.A.5 A Few C Language Examples
int x; Two strong symbols have the same name.
f1() {} f1() {} Link time error.
int x; int x; Both x's are the same.
f1() {} f2() {} Either might be chosen as location for x.
int x=7; int x; Both x's are the same.
f1() {} f2() {} The first x will be chosen.
int x=7; double x; Writes to x in f2() WILL overwrite y!
int y=5; f2() {} Scary!
f1() {}
int x; double x; Writes to x in f2() MIGHT overwrite y!
int y; f2() {} Even scarier than the previous!
f1() {}
Static vs. Dynamic Linking
The figure in 7.A.3 contains two kinds of libraries:
statically-linked libraries that are processed by the linker and
dynamically linked libraries (DLLs) processed by the loader.
How do they differ?
Static Linking
You know well that when your programs run, functions are executed
that you did not write (e.g. printf()).
Many common routines are placed in libraries that the linker
searched by default.
For example the cc (or gcc) command on crackle2 automatically
searches libc.a, which contains compiled versions of many
common C programs like strcpy.
This one library contains hundreds of functions, but it is indexed
so the linker only includes the ones you used.
(It is called a .a file because it is an archive of many
routines.)
These libraries are called static libraries and
the linking just discuss is called static linking.
After this static linking is performed, an executable file results,
which just needs be loaded into memory and executed.
Conceptually, we are done: we have an executable file.
However, a large computing system might have thousands (or more)
user programs stored on disk all containing strcpy() and
the RAM on a large busy machine might have dozens of programs running
each of which contains strcpy().
Perhaps more dramatic would be the space used by multiple copies
of huge graphics libraries contained in many graphical programs.
Dynamic Linking, DLLs and Shared Libraries
To minimize the duplication just discussed many systems employ
dynamic linking.
Instead of (statically) linking in a copy of e.g., strcpy()
only a stub routine is linked and when the program is loaded into
RAM the stub is replaced by the real code.
The savings occurs in two ways.
- When the program is not running, only the small stub is on disk
not the full library routine.
- Before replacing the stub by the real routine, the loader
checks to see if a copy is already running on the machine in a
different application.
If the real routing is already running, the code is shared
between the multiple users, instead of being replicated.
Chapter 6 Memory Hierarchy
6.1 Storage Technology
What do we want from an ideal memory?
- Big (in capacity)
- Fast (to access; also high throughput)
- Cheap (always helps)
- Non-volatile (maintains data when power is off)
- Secure (doesn't
leak
data)
We will emphasize the first two.
Unfortunate Laws of Hardware
- Big and Fast are essentially contradictory, they are traded-off
against each other.
- Big, Fast, and Cheap is basically hopeless.
The Basic Trade-off Becomes the Basic Goal
We can get/buy/build either
small and fast
or
big and slow
.
Our goal is to mix the two and get a good approximation to the
impossible big and fast.
6.1.1 Random Access Memory (RAM)
Two varieties: Static RAM (SRAM) and Dynamic RAM (DRAM).
| Name | Trans
per bit | Access
time |
Needs
refresh | Volatile |
Cost | Where used |
| SRAM | 4 or 6 | 1x |
No | Yes |
100x | Cache |
| DRAM | 1 | 10x |
Yes | Yes |
1x | Main Memory |
RAM constitutes the memory in most computing devices.
Unlike tapes or CDs they are not limited to sequential access.
The table on the right compares them.
SRAM is much faster and (for the same cost) much lower capacity.
Trans per bit gives the number of transistors needed to implement
one bit of each memory type.
(The 4-transistor version is denser but harder to manufacture.)
Both SRAM and DRAM are volatile, meaning that, if the power is
turned off, the memory contents are lost.
Due to the volatility of both RAM varieties, when a computer is
started its first accesses are to some other memory type (normally a
ROM or read-only memory).
DRAM, in addition to needing power, needs to be refreshed.
That is even if power remains steady, DRAM will lose its contents if
it is not accessed.
Hence there is circuitry to periodically generate dummy accesses to
the DRAM, even if the system is otherwise idle.
6.1.2 Disk Storage.
Disks are huge and slow.
Unlike RAM disks have moving parts.
At the end of a semester I will bring some old ones to class for us
to look at.
Unlike modern disks, these relics are big enough to see the active
components.
For today we will have to settle for some pictures and words
(z*/h*/me*).
Magnetic Disks (Hard Drives)
Show a real disk opened up and illustrate the components.
- Platter
- Surface
- Head
- Track
- Sector
- Cylinder
- Seek time
- Rotational latency
- Transfer rate
Consider the following characteristics of a disk.
- Seek time.
This is actually quite complicated to calculate since
you have to worry about, acceleration, travel time, deceleration,
and "settling time".
- RPM (revolutions per minute).
- Rotational latency.
The average value is the time for (approximately) one half a
revolution.
- Transfer rate.
This is determined by the RPM and bit density.
- Sectors per track.
This is determined by the bit density.
- Tracks per surface (i.e., the number of cylinders).
This is determined by the bit density.
- Tracks per cylinder (i.e, the number of surfaces).
Disk Performance‐Choice of Block Size
It is important to realize that disks always transfers (read or
write) a fixed-size block.
- If you want to read part of a block, you instead read a full
block and discard what you don't want.
- If you want to write part of a block, you read the full block,
modify the part you want to change and write the modified full
block.
That means two I/Os.
- If you want to write a piece that crosses a block boundary, you
need four(!) I/Os even if the piece is only two
bytes in size.
Current commodity disks have (roughly) the following
performance.
- Seek time is around 5ms (amazing!).
- The rotation rate for a desktop disk is often 7200 RPM
(revolutions per minute) with 10k, 15k and 20k available.
6000 RPM is 100 revolutions per second or one revolution per 10ms.
So half a revolution (the average rotation needed to reach a given
point) for a 7200RPM disk is less than 5ms.
- Transfer rates are around 100MB/sec = 100KB/ms.
- Laptop disks are normally a little slower (5400 RPM) to save
power.
This is quite extraordinary.
For a large sequential transfer, in the first 10ms,
no bytes are transmitted; in the next
10ms, 1,000,000 bytes are transmitted.
This analysis suggests using large disk blocks, 100KB or more.
But the internal fragmentation would be severe since many files
are small.
Moreover, transferring small files would take longer with a 100KB
block size.
In practice typical block sizes are 4KB-8KB.
Multiple block sizes have been tried (e.g., blocks
are 8KB but a file can also have fragments
that are a
fraction of a block, say 1KB).
Start Lecture #19
6.1.3 Solid State Disks (SSDs)
This is flash RAM (the same stuff that is in thumb drives
)
organized in sector-like blocks as is a disk.
Unlike RAM, SSD is non volatile; unlike a disk it has no moving
parts (and hence is much faster then a hard disk
).
It is also more expensive per byte than a hard disk.
The blocks in an SSD can be written a large number
of times.
However, the large number
is not large enough to be
completely ignored.
6.1.4 Storage Technology Trends
Summary: Everything is getting better but the rates of improvement
are quite different.
Cost per Byte Decrease from 1985 to 2015
SRAM: factor of 100
DRAM: factor of 50,000
DISK: factor of 3,000,000
Speed Increase from 1985 to 2015
SRAM: factor of 100
DRAM: factor of 10
DISK: factor of 25
CPU: factor of 2,000 (includes multiprocessor effect)
6.2 Locality
Remember we want to cleverly mix some small/fast memory with a
large pile of big/slow memory and get a result that approximates
the performance of the impossible big/fast memory.
The idea will be to put the important stuff
is the
small/fast and the rest in big/slow.
But what stuff is important?
The answer is that we want to put into small/fast the data and
instructions that will be accessed in the near future and leave the
rest in big/slow.
Unfortunately this involves knowing the future, which is
impossible.
We need a heuristic for predicting what memory addresses will be
accessed in the near future.
The heuristic used is the principle of locality: programs
will access in the near future addresses near those they accessed in
the near past.
The principle of locality is not a law of nature, one can write
programs that violate the principle, but on average it works very
well.
Unless you want your programs to run slower, there is no reason to
deliberately violate the principle.
Indeed, programmers needing high performance, try hard to increase
the locality of their programs.
We often use the term temporal locality for the tendency
that referenced locations are likely to be re-referenced soon and
use the term spacial locality for the tendency that
locations near referenced locations are themselves referenced
soon.
6.3 The Memory Hierarchy
In fact there is more than just small/fast vs big/slow.
We have minuscule/light-speed, tiny/super-fast, ...,
enormous/tortoise-like.
Starting from the fastest/smallest a modern system will have.
- Registers
- Level 1 (L1) Cache
- L2 Cache
- L3 Cache
- Main Memory
- Secondary Storage (Local Disks)
- Tertiary Storage (Robotic Disks)
- Offline Storage
Registers
Today a register is typically 8 bytes in size and a computer will
have a few dozen of them, all located in the CPU.
A register can be accessed in well under a nanosecond and modern
processors access at least one register most operations.
In modern microprocessor designs, arithmetic and many other
operations are performed on values currently in registers.
Values not in registers must be moved there prior to operating on
them.
Registers are a very precious resource and the decision which data
to place in registers and when to do so (which normally entails
evicting some other data) is a difficult and well studied
problem.
The effective utilization of registers is an important component
of compiler design—we will not study it in this course.
Caches
For the moment ignore the various levels of caches and think of a
cache as an intermediary between the main memory, which
(conceptually, but not in practice) contains the entire program, and
the registers, which contains only the currently most important few
dozen values.
In this course we will study the high-level design of caches and
the performance impact of successful caching.
A memory reference that is satisfied by the cache requires much
less time (say one tenth to one hundredth the time) than a reference
satisfied by main memory.
Our main study of the memory hierarchy will be at the
cache/main-memory boundary.
We will see the performance effects of various hit ratios
,
i.e., the percentage of memory references satisfied in the cache vs
satisfied by the main memory.
Multilevel Caches
When first introduced, a cache was the small and
fast storage class and main memory was the big and slow.
Later the performance gap widened between main memory and caches so
intermediate memories were introduced to bridge the gap.
The original cache became the L1 cache, and the gap bridgers became
the L2 and L3.
The fundamental idea remained the same: if we make it smaller it can
be faster.
Main Memory
We will pretend that the entire program including its data resides
in main memory.
In the next course, 202 operating systems, we will study the effect
of demand paging
, in which the main memory acts as a cache
for the disk system that actually contains the program.
Secondary Storage (Local Disks)
We know that the disk subsystem holds all our files and thus is
much larger than main memory, which holds only the currently
executing programs.
It is also much slower: a disk access requires a
few MILLIseconds; whereas a main memory access is a fraction of a
MICROsecond.
The time ratio is about 100,000.
Tertiary Storage
This is some robot controlled storage, where the robot
automatically fetches the requested media and mounts it.
Tertiary Storage is sometimes called nearline storage because it is
nearly online.
Offline (Removable) Storage
Requires some human action to mount the device (e.g., inserting a
cd).
Hence the data is not always available.
6.4 Cache Memories
6.4.1 Generic Cache Memory Organization
A cache is a small fast memory between the
processor and the main memory.
It contains a subset of the contents of the main memory.
A Cache is organized in units of blocks
or lines.
Common block sizes are 16, 32, and 64 bytes.
A block is the smallest unit we can move between a cache and main
memory (some designs move subblocks, but we
will not discuss such designs).
- We view memory as organized in blocks as well.
The size of a memory block is the same as the size of a cache
block.
If the block size is 16, then bytes 0-15 of memory are in block 0,
bytes 16-31 are in block 1, etc.
- Transfers from memory to cache and back are one block.
- Big blocks make good use of spatial locality.
A hit occurs when a memory reference is found in the upper level
(small, fast) of the memory hierarchy.
Definitions
- We will be interested in cache hits, when the
reference is found in the cache.
- A miss is a non-hit.
- The hit rate is the fraction of memory references
that are cache hits.
- The miss rate is 1 - hit rate, which is the
fraction of references that are misses.
- The hit time is the time required for a hit.
- The miss time is the time required for a miss.
- The miss penalty is miss time - hit time.
Addressing Bytes, (4-byte) Words, and Blocks
Consider the following address (in binary).
10101010_11110000_00001111_11001010.
This is a 32-bit address.
I used underscores to separated it into four 8-bit pieces just to
make it easy to read; the underscores have no significance.
Machine addresses are non-negative (unsigned) so the address above
is a large positive number (greater than 2 billion).
All the computers we shall discuss are byte addressed.
Thus the 32-bit number references a byte.
So far, so good.
The (4-Byte) Word Addressed and the Byte Offset
We will assume in our study of caches that each word
is four bytes.
That is, we assume the computer has 32-bit words.
This is not always true (many old machines had 16-bit, or smaller,
words; and many new machines have 64-bit words), but to repeat, we
will always assume 32-bit words.
Since 32 bits is 4 bytes, each word contains 4 bytes.
Recall that we assume aligned accesses, which means that a word (a
4-byte quantity) must begin on a byte address that is a multiple of
the word size, i.e., a multiple of 4.
So word 0 includes bytes 0-3; word 1 includes bytes 4-7; word n
includes bytes 4n, 4n+1, 4n+2 and 4n+3; and the four consecutive
bytes 6-9 do NOT form a word.
Question: What word includes the byte address given above,
10101010_11110000_00001111_11001010?
Answer:
10101010_11110000_00001111_110010, i.e, the address divided
by 4.
Question: What are the other bytes in this word?
Answer:
10101010_11110000_00001111_11001000,
10101010_11110000_00001111_11001001,
and
10101010_11110000_00001111_11001011
Question: What is the byte offset of the original
byte in its word?
Answer: 10 (i.e., two), the address mod 4..
Question: What are the byte-offsets of the other
three bytes in that same word?
Answer: 00, 01, and 11 (i.e, zero, one, and
three).
The 32-Byte Block Addressed and the Word and Byte Offset
Blocks vary in size.
We will not make any assumption about the block size, other than
that it is a power of two number of bytes.
For the examples in this subsection, assume that each block is 32
bytes.
Since we assume aligned accesses, each 32-byte block has a byte
address that is a multiple of 32.
So block 0 is bytes 0-31, which is words 0-7.
Block n is bytes 32n, 32n+1, ..., 32n+31.
Question: What block includes our byte address
10101010_11110000_00001111_11001010?
Answer: 10101010_11110000_00001111_110,
i.e., the byte address divide by 32 (the number of bytes in the
block) or the word address divided by 8 (the number of words in the
block).
6.4.2 Direct-Mapped Caches
We start with a very simple cache organization, one that was used
on the Decstation 3100, a 1980s workstation.
In this design cache lines (and hence memory blocks) are one word
long.
- This does not take advantage of spatial locality so is not
done in modern machines.
- We will soon drop this assumption.
Also in this design each memory block can only go in one specific
cache line.
- This is called a Direct Mapped organization.
- The location of the memory block in the cache (i.e., the
block number in the cache or the
cache block number
) is
the memory block number modulo the number of blocks in the
cache.
- For example, if the cache contains 100 blocks, then memory block
34452 is stored in line 52.
Memory block 352 is also stored in line 52 (but not at the same
time, of course).
- In real systems the number of lines in the cache is a power
of 2 so taking modulo is just extracting low order bits.
- Example: if the cache has 4 lines, the location of a block
in the cache is the memory block number mod 4, which is the
low order 2 bits of the memory block number.
- A direct mapped cache is simple and fast, but has more
misses than the
set associative caches
we will soon
study.
We shall assume that each memory reference issued by the processor
is for a single, complete word.
Accessing a Direct-Mapped Cache
On the right is a diagram representing a direct mapped cache with
C=4 blocks and a memory with M=16 blocks.
How can we find a memory block in such a cache?
This is actually two questions in one.
- Is the memory block present in the cache?
- Where in the cache is the memory block, assuming it is
present?
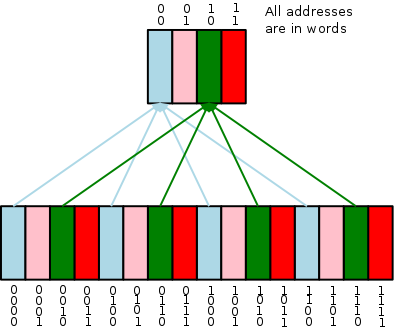
The second question is the easier.
Let C be the number of blocks in the cache.
Then memory block number N can be found only in cache line
number N mod C (it might not be present at
all).
But many memory blocks are assigned to that same cache line.
For example, in the diagram to the right all the
green blocks in memory are assigned to the one green block in the
cache.
So the first question reduces to:
Is memory block N present in cache block N/C?
Referring to the diagram we note that, since only a green memory
block can appear in the green cache block, we know that the
rightmost two digits of the memory block in the green cache block
are 10 (the number of the green cache block).
So to determine if a specific green memory block is in the green
cache block we need the rest
of the memory block number.
Specifically is the memory block in the green cache
block 0010,
0110, 1010,
or 1110?
It is also possible that the green cache block is empty (called
invalid), i.e, it is possible that no memory block is in this cache
block.
- So we need the
rest
of the address (i.e., red digits lost
when we reduced the block number modulo the size of the cache) to
see if the block in the cache is the memory block of interest.
That number is N/C, using the terminology above.
- The cache stores the rest of the address, called the
tag and we check the tag when looking for a block.
- Since we will always choose C to be a power of 2, the
tag (N/C) is simply the high order bits of N.
- Also stored is a valid bit per cache block so that we
can tell if there is a memory block stored in this cache
block.
When the system is powered on, all the cache blocks are invalid so
all the valid bits are off.
| Addr(10) | Addr(2) | hit/miss | block# |
|---|
| 22 | 10110 | miss | 110 |
| 26 | 11010 | miss | 010 |
| 22 | 10110 | hit | 110 |
| 26 | 11010 | hit | 010 |
| 16 | 10000 | miss | 000 |
| 3 | 00011 | miss | 011 |
| 16 | 10000 | hit | 000 |
| 18 | 10010 | miss | 010 |
On the right is a table giving a larger example, with C=8
(rather than 4, as above) and M=32 (rather than 16).
We still have M/C=4 memory blocks eligible to be stored in
each cache block.
Thus there are two tag bits for each cache block.
- The example gives a sequence of memory references.
- Do this example on the board showing the addresses stored in the
cache at all times.
The cache is initially empty, i.e., all cache blocks are
invalid.
- Also show the tags.
- In the table on the right, all the addresses are word
addresses.
For example the reference to 3 means the reference to word 3
(which includes bytes 12, 13, 14, and 15).
- Naturally, if a reference is a hit, the current memory block
remains assigned to this cache block (what other memory block
could you choose to assign?).
- If the reference experiences a miss because the cache block is
invalid, we assign this memory block to the cache block (there
are no other contenders).
- If reference experience a miss and the cache block is valid, we
have a dilemma.
Should we leave the existing memory block in the cache block or
should we replace it with the newly referenced cache block.
Our choice (in this example, not in all designs) is to discard the
current contents of the cache block and let the new reference
takes its place.
- Remember that in this very simple design, we have a
direct-mapped cache with block size one word.
Also, all memory references are for one word.
I often abbreviate this situation by saying blksize=refsize=1.
Cache Contents, Hits, and Misses
Shown on the right is a eight entry, direct-mapped cache with block
size one word.
As usual all references are for a single word (blksize=refsize=1).
In order to make the diagram and arithmetic smaller the machine has
only 10-bit addressing (i.e., the memory has only
210=1024 bytes), instead of more realistic 32- or 64-bit
addressing.
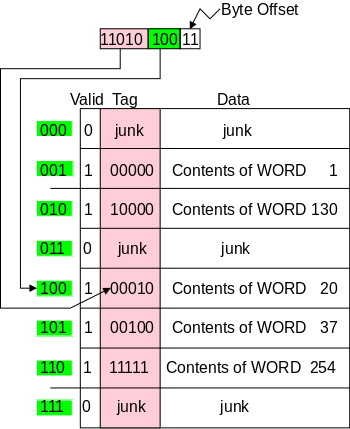
Above the cache we see a 10-bit address issued by the processor.
There are several points to note.
- The valid bit.
If this bit is not set, then the entire line is invalid.
When the system is first powered on all the lines are invalid.
- This machine, like all the ones we will study is byte addressed
and has 4-byte words.
Since the cache only handles references to a word, the rightmost
two bits of the address from the processor, which specify the byte
offset within the word, are ignored for cache access.
- The (byte) address given is 1101010011.
- Once we drop the byte-offset bits, the word address of the
reference is 11010100.
Since the block size is one word, the block number is also
11010100.
Since the cache has eight entries, the cache line number is
11010100 mod 8 = 11010100 mod 23 = 100 (the low order
three bits).
- We see that the valid bit is on for entry 100 (i.e., entry 4)
so the line is valid.
- However, the tags do not match.
Hence the reference is a cache miss.
- Question: Would a memory reference 1000001001
be a hit or miss?
Answer: A hit since the tags match (100000).
- Question: Would a memory reference 0000001001
be a hit or miss?
Answer: A miss since the tags do not match
(100000 vs 000000)).
- Explain in class how we know that the data field in entry 2
contains the contents of word 130.
- Make sure you understand why the other data fields contain the
contents indicated.
Start Lecture #20
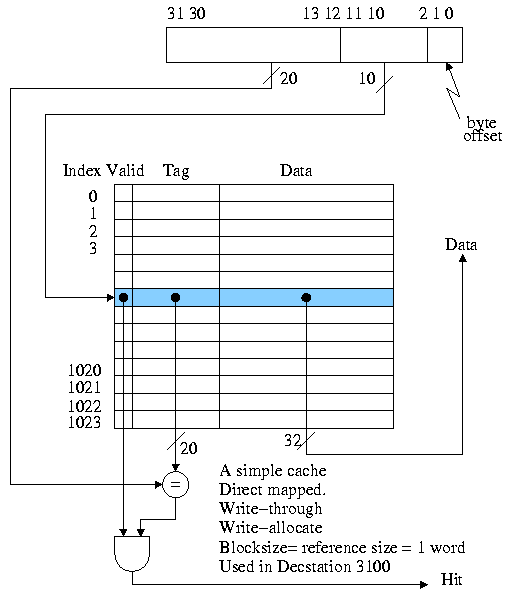
Circuitry Needed to Detect Hits and Misses
The circuitry needed for a simple cache (direct mapped,
blksize=refsize=1) is shown on the right.
The only difference from the example above is size.
This cache holds 1024 blocks (not just 8) and the memory holds
230∼1,000,000,000 blocks (not just 256).
That is, the cache size is 4KB and the memory size is 4GB.
To determine if we have a hit or a miss, and to return the data in
case of a hit is quite easy, as the circuitry indicates.
Make sure you understand the division of the 32 bit address into
20, 10, and 2 bits.
Calculate on the board the total number of bits in this cache and
the number used to hold data.
Ignore the Write-through
and write allocate
comments,
as we are not studying cache designs in that much detail.
Processing a Read for this Simple Cache
The action required for a hit is clear, namely return to the
processor the data found in the cache.
For a miss, the best action is fairly clear, but requires some
thought.
- Clearly we must go to central memory to fetch the requested
data since it is not available in the cache.
- If the cache line was invalid, we store the memory block in
the cache as well as returning it to the processor.
- The question remaining is, assuming the the miss occurred for
a valid line, should we place in the cache the
data fetched from memory, evicting the old data (which was for
a different address), or should we keep the old
data in the cache.
- We definitely want to store the new data instead of
the old.
Question: Why?
Answer: Temporal Locality.
- Question: What should we do with the old data?
Can we just toss it or do we need to write it back to central
memory?
Answer: It depends!
- We will see shortly that the action needed on this
read miss, depends on our choice of action
for a write hit.
The Decstation 3100 Write Policy
The simplest write policy is write-through, write-allocate.
The decstation 3100 discussed above adopted this policy and
performed the following actions for any write, hit or miss, (recall
that, for the 3100, block size = reference size = 1 word and the
cache is direct mapped).
- Index the cache using the correct LOBs (i.e., not the very
lowest order bits as these give the byte offset).
- Write the data and the tag into the cache.
- For a hit, we are overwriting the tag with itself.
- For a miss, we are performing a write allocate and, since
the cache is write-through, memory is guaranteed to be
correct so we can simply overwrite the current entry.
- Set Valid to true (it may already be true).
- Send the request to main memory.
Although the above policy has the advantage of simplicity,
it is out of favor due to its poor performance.
Improvement: Use a Write Buffer
Unified vs Split I and D (Instruction and Data) Caches
Improvement: Multiword Blocks
The setup we have described does not take any advantage of spatial
locality.
The idea of having a multiword block size is to bring into the cache
words near the referenced word since, by spatial locality, they are
likely to be referenced in the near future.
We continue to assume that all references are for one word
and (for a while) that the cache is direct mapped.
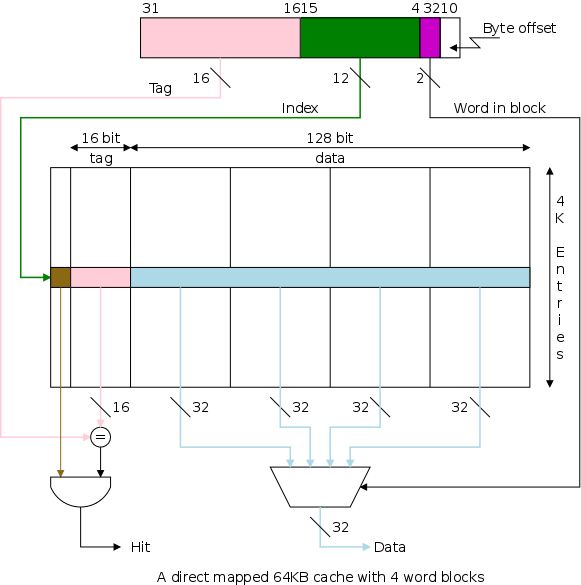
The figure on the right shows a 64KB direct mapped cache with
4-word (16-byte) blocks.
Questions: For this cache, when the memory word
referenced is in a given block, where in the cache does the block
go, and how do we find that block in the cache?
Answers:
- Byte n is in word n/4,
for the 4-byte words we are assuming.
So bytes 4n...4n+3 are in word n.
- For a cache like the one on the right with 16B (4 word) blocks,
byte n is stored in the memory
block n/16 and word n is stored in memory
block n/4.
So bytes 16n...16n+15 are stored in
block n.
- The word-in-block = the word address modulo 4 (the number of
words per block).
- The number of blocks in the cache = the size of the cache
divided by the size of each block.
For the pictured cache this is 64KB / 16B = 4K.
- The cache block number or cache line number =
the memory block number modulo the number of blocks in the
cache (for the direct mapped caches we are now studying).
- The tag = the memory block number / the number of blocks in the
cache.
Show from the diagram how this gives the pink portion for the tag
and the green portion for the index or cache block number.
Consider the cache shown in the diagram above and a reference to
word 17003.
- 17003 / 4 = 4250 with a remainder of 3.
Hence the memory block number is 4250 and the word-in-block is
3.
- A 64KB cache with 16B blocks has 64KB/16B=4K=4096 entries.
Since 4250 / 4096 gives 1 with a remainder of 154, memory block
number 4250 is stored in cache line 154 with a tag of 1.
Summary: Memory word 17003 resides in word 3 of
cache block 154 with tag 154 set to 1 and with valid 154 true.
The cache size or cache capacity is
the size of the data portion of the cache (normally measured in
bytes).
For the caches we have see so far this is the block size times the
number of entries.
For the diagram above this is 64KB.
For the simpler direct mapped caches block size = word size so the
cache size is the word size times the number of entries.
Note that the total size of the cache includes all the bits.
Everything except for the data portion is considered overhead since
it is not part of the running program.
For the caches we have see so far the total size is
(block size + tag size + 1) * the number of entries
Let's compare the pictured cache with another one containing 64KB
of data, but with one word blocks.
- Calculate on the board the total number of bits in each cache;
this is not simply 8 times the cache size in
bytes.
- If the references are strictly sequential the pictured cache
has 75% hits; the simpler cache with one word blocks
has no hits.
How do we process read/write hits/misses for a cache with multiword
blocks?
- Read hit: As before, return the data found to the
processor.
- Read miss: As before, due to locality we discard (or write back
depending on the write hit policy) the old line and fetch the new
line.
- Write hit: As before, write the word in the cache (and perhaps
write memory as well depending on the policy).
- Write miss: A new consideration arises.
As before we might or might not decide to replace the current
line with the referenced line and, if we do decide to replace
the line, we might or might not have to write the old line back.
The new consideration is that if we decide to replace the line
(i.e., if we are implementing store-allocate), we must remember
that we only have a new word and the unit of
cache transfer is a multiword line.
We will not discuss this (advanced) consideration.
Why not make block size enormous?
For example, why not have the cache
be one huge block.
- NOT all access are sequential.
- With too few blocks misses go up again.
Start Lecture #21
Review Cache Material
6.4.3 Set Associative Caches
Improvement: Associative Caches
Consider the following sad story.
Jane's computer has a cache that holds 1000 blocks and Jane has a
program that only references 4 (memory) blocks, namely blocks 23,
1023, 123023, and 7023.
In fact the references occur in order: 23, 1023, 123023, 7023, 23,
1023, 123023, 7023, 23, 1023, 123023, 7023, 23, 1023, 123023, 7023,
etc.
Referencing only 4 blocks and having room for 1000 in her cache,
Jane expected an extremely high hit rate for her program.
In fact, the hit rate was zero.
She was so sad, she gave up her job as web-mistress, went to medical
school, and is now a brain surgeon at the mayo clinic in Rochester
MN.
The Easy Way Out: Direct Mapped
So far we have studied only direct
mapped caches, i.e., those for which the location in the
cache is determined by the address, i.e., there is
only one possible location in the cache for any
block.
In Jane's sad story four memory blocks were assigned to the same
cache block so they kept evicting each other and the rest of the
cache was unused.
Although this organization does not give good performance it does
have one advantage: to check for a hit we need compare
only one tag with the HOBs of the addr.
Going All the Way: Fully Associative
The other extreme is a fully associative
cache in which a memory block can be placed in any cache block.
- Since any memory block can be in any cache block, the cache
index where the memory block is stored tells us nothing about
which memory block is stored there.
Hence the tag must be the entire memory block number
Moreover, we don't know which cache block to check so we must
check all cache blocks to see if we have a hit.
- The larger tag is a problem.
- The search is a disaster.
- It could be done sequentially (one cache block at a time),
but this is much too slow.
- We could have a comparator with each tag
and mux all the blocks to select the one that matches.
- This is too big due to both the many comparators and
the humongous mux.
- However, it is exactly what is done when implementing
translation lookaside buffers (TLBs), which are used with
demand paging (as you will see when you take 202,
operating systems).
- Question: Are the TLB designers
magicians?
Answer: No, TLBs are small.
- An alternative is to have a table with one entry per
memory block telling if the memory block is in
the cache and if so giving the cache block number.
This is too big and too slow for caches but is exactly what is
used for demand paging (again, 202) where the memory blocks in cso
correspond to pages on disk in os and the table we would need in
cso is called the page table in os.
The Middle Ground: Set Associative
Most common for caches is an intermediate
configuration called set associative or n-way associative
(e.g., 4-way associative).
The value of n is typically a small power of 2.
If the cache has B blocks, we group them into B/n
sets each of size n.
Since an n-way associative cache has sets of size n blocks,
it is often called a set size n cache.
For example, you often hear of set size 4 caches.
In a set size n cache, memory block number K is stored in set
number (K mod the number of sets), which equals K mod (B/n).
The picture below shows a system storing memory block 12 in three
cache, each having 8 blocks.
The left cache is direct mapped; the middle one is 2-way set
associative; and the right one is fully associative.
- The blue (both light and dark) indicate the cache blocks in
which memory block 12 might have been
stored.
- The dark blue is the cache block in which the memory block 12
is stored.
- The arrows show the blocks (i.e., tags) that must be searched
to look for memory block 12.
The arrows point to the blue blocks.
- We explain the figure below.
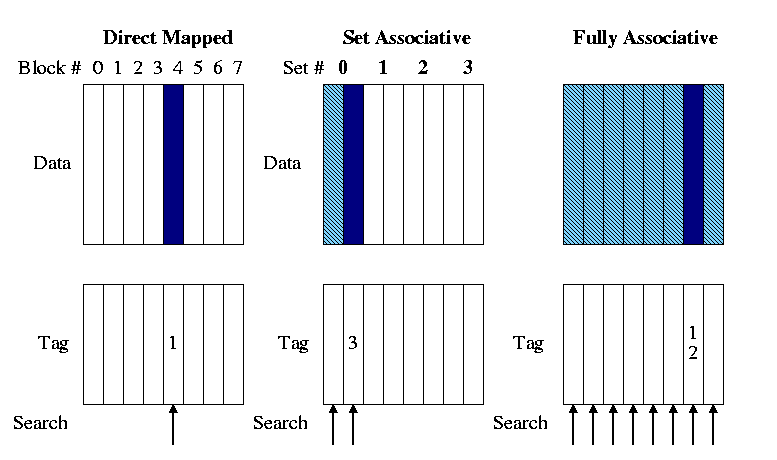
The Left-Hand Diagram: Direct Mapped
We have already done direct mapped caches but to repeat:
- If a given memory block resides in the cache, the cache block
number containing the block equals the memory block number mod the
number of cache blocks.
- Expressed algebraically: CBN = MBN mod NCB.
- Similarly, the tag = MBN / NCB.
- In the example, the memory block number is 12 and there are 8
cache blocks so memory block 12 is stored in cache block 12 mod 8
= 4 and the tag is 12 / 8 = 1.
The Middle Diagram: Set Associative
The middle picture shows a 2-way set associative
cache also called a set size 2 cache.
A set is a group of consecutive cache blocks.
- As the name indicates the size of each set in the picture is 2
(cache blocks) and hence the number of cache sets = the number of
cache blocks / 2.
- In general the number of cache sets is the number of cache
blocks divided by the size of each set.
Algebraically: NCS = NCB / SS.
- If a given memory block resides in the cache, the set number
containing the block equals the memory block number mod the number
of sets.
- Algebraically: SN = MBN mod NCS.
- Similarly, the tag = MBN / NCS.
- Specifically, in the example memory block 12 is stored in cache
set 12 mod (8/2) = 12 mod 4 = 0.
- Similarly, the tag is 12/(8/2) = 3.
- We do not know which (if any) of the cache
blocks in the set contain the memory.
Hence we must check the tags for all entries in the set to see if
any match, which explains the two arrows in the middle
diagram.
The Right-Hand Diagram: Fully Associative
The right picture shows a fully associative cache, i.e. a cache
where there is only one set and it is the entire cache.
- In the example the one set has 8 elements so memory block 12 is
stored in set 12 mod (8/8) = 12 mod 1 = 0, which is the only
set.
- The tag is 12 / (8/8) = 12/1 = 12, i.e., the entire memory block
number.
- We do not know which (if any) of the cache
blocks in the set contain the memory.
Hence we must check the tags for all entries in the entire cache
to see if any match.
This explains the eight arrows in the right diagram.
- These three points hold for fully associative caches of any
size.
- There is only one set, set 0.
- The tag is the entire memory block number
- We need check the tags for all entries.
For a cache holding n blocks, a set-size n cache is
fully associative and a set-size 1 cache is direct
mapped.
Start Lecture #22
Note: If you have N numerical address but
only n<N mailboxes available, one possibility (the one
we use in caches) is to put mail for address M in
mailbox M%n.
Then to distinguish address assigned to the same mailbox you need
the quotient M/n.
In caches we call the mailbox assigned the cache index and the
quotient needed to disambiguate is called the tag.
The key principle is
Dividend = Quotient * Divisor + Remainder
We look in the Remainder (the cache index) store the Quotient (the
tag) and know the Divisor (the number of cache slots).
Hence we can determine the Dividend (the memory block number).
Remark: In class extend the example from last
lecture by doing a 4-way set associative cache.
Remark: A preview of the first part of lab3 is
here.
When the cache was organized by blocks and we wanted to find a
given memory word we first converted the word address to the
MemoryBlockNumber (by dividing by the #words/block and then formed
the division
MemoryBlockNumber / NumberOfCacheBlocks
The remainder gave the index in the cache and the quotient gave the
tag.
We then referenced the cache using the index just calculated.
If this entry is valid and its tag matches the tag in the memory
reference, that means the value in the cache has the right quotient
and the right remainder.
Hence the cache entry has the right dividend, i.e., the correct memory
block.
Determining the Set Number and the Tag
Recall that for the a direct-mapped cache, the cache
index is the cache block number (i.e., the cache is indexed by cache
block number).
For a set-associative cache, the cache index is the set
number.
Just as the cache block number for a direct-mapped cache is the
memory block number mod the number of blocks in the cache, the set
number for a set-associative cache is the (memory) block number mod
the number of sets.
Just as the tag for a direct mapped cache is the memory block
number divided by the number of blocks in the cache, the tag for a
set-associative cache is the memory block number divided by the
number of sets in the cache.
Summary: Divide the memory block number by the
number of sets in the cache.
The quotient is the tag and the remainder is the set number.
(The remainder is normally referred to as the memory block number mod
the number of sets.)
Do NOT make the mistake of thinking that a set
size 2 cache has 2 sets, it has NCB/2 sets each of size 2.
Ask in class.
- What is another name for an 8-way associative cache having 8
blocks?
- What is another name for a 1-way set associative cache?
Question: Why is set associativity good?
For example, why is 2-way set associativity better than direct
mapped?
Answer: Consider referencing two arrays of size 50K
that start at location 1MB and 2MB.
- Both contend for the same cache blocks in a direct mapped 128KB
cache.
- They fit together in a 128K 2-way associative cache.
Locating a Block in the Cache
Question: How do we find a memory block in a 4KB
4-way set associative cache with block size 1 word?
Answer: This is more complicated than for a
comparable direct mapped cache.
We proceeds as follows.
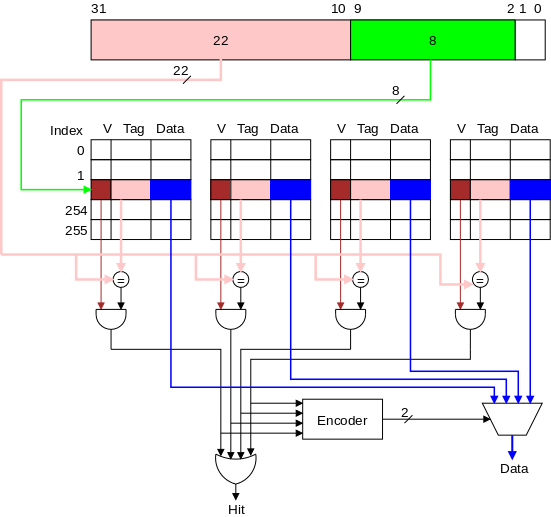
- First drop the low 2 bits (byte in word) of the memory address,
leaving 30 bits for the memory word number (MWN).
- The MBN = the MWN since, in this example, the block size is 1
word.
- Each set contains 4 blocks = 4 words = 16B.
- Hence the cache has 4KB/16B=256 sets
- Divide the memory block number by the number of sets.
The quotient is the tag.
That is, tag = MBN / NS = MBN / 256.
Since 256=28, dividing by 256 is simply simply
separating the dividend into two pieces: the right 8 bits are the
remainder and the rest is the quotient.
- The quotient, i.e, the tag, is shown in pink in the
diagram.
- The remainder (i.e., the memory block number mod the number of
sets) is the set number (i.e., the index of the entry).
This portion of the address is shown in green.
Again note that, since the divisor is a power of 2 (specifically,
256), calculating the quotient and divisor does not require a
division).
- Compare all the tags and valid bits in the set
with the tag of the memory block.
- If any valid tag matches, a hit has occurred
and the corresponding data entry contains the memory block.
- If more than one valid tag matches, an error has occurred: the
same memory block is stored in two or more sets.
- If no valid tag matches, a miss has
occurred.
The advantage of increased associativity is normally an increased
hit ratio.
Question: What are the disadvantages?
Answer: It is slower, bigger, and uses more energy
due to the extra logic.
Combining Set-Associativity and Multiword Blocks
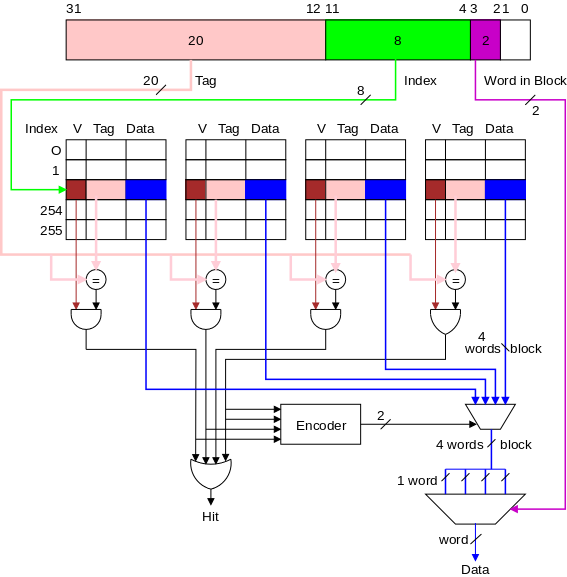
This is a fairly simple combination of the two ideas and is
illustrated by the diagram on the right.
- Start with the picture just above for a set-associative cache
with blocksize = 1 word.
- Each blue portion of the cache is now a 4-word block, not
just a single word.
- Hence the
data
coming out of the multiplexor at
the bottom right of the previous diagram is now a block.
In the diagram on the right, the block is 4 words.
- As with direct-mapped caches having multi-word blocks, we again
use the word-within-block bits to choose the proper word.
In the diagram this is performed by the very bottom multiplexor,
using the magenta word-within-block bits as the selector
line.
- Note that this cache is bigger than the one above.
Each has 256 sets.
Each has 256*4=1024 blocks.
But the bottom has bigger blocks.
Our description and picture of multi-word block, direct-mapped
caches is here, and our description
and picture of single-word block, set-associative caches is just
above.
It is useful to compare those two picture with the one on the right
to see how the concepts are combined.
Below we give a more detailed
discussion of which bits of the memory address are used for which
purpose in all the various caches.
Choosing Which Block to Replace
When an existing block must be replaced, which victim should we
choose?
The victim must be in the same set (i.e., have the same index) as
the new block.
With direct mapped (a.k.a 1-way associative) caches, this determines
the victim so the question doesn't arise.
With a fully associative cache all resident blocks are candidate
victims.
For an n-way associative cache there are n candidates.
We will not consider these question.
Victim selection in the fully-associative case is covered
extensively in 202.
Summary of What We Officially Know How to Do For Loads and Stores
When you write y = x+1; in C the processor must read the
value of x from memory.
This is called a load
instruction.
The processor also must write the new value of y
to memory.
This is called a "store" instruction.
Direct Mapped Caches
For a direct mapped cache with 1-word blocks we know
how to do everything.
- Load Hit: Cache returns the stored value to the processor.
- Load Miss: The value is obtained from memory and stored in the
cache.
- Store Hit: Cache and memory are updated with the new value.
- Store Miss: Memory is updated; the cache also stores the new
value and tag overwriting whatever was there.
If a block contains multiple words the only difference for us is
that on a store miss the rest of the block must be obtained from
memory and stored in the cache.
Set Associative Caches
An extra complication arises on a cache miss (either
a load or a store).
If the set is full (i.e., all blocks are valid) we must replace one
of the existing blocks in the set and we are not learning which one
to replace.
As mentioned previously, in 202 you will learn how operating systems
deal with a similar problem.
However, caches are all hardware and hence must be fast so cannot
adopt the complicated OS solutions.
Start Lecture #23
How Big
Is a Cache?
There are two notions of size.
Definition: The cache size
is the capacity of the cache.
- This means, the total size of all the blocks.
- In the diagrams above it is the size of the blue portions.
- The size of the cache in the last diagram is 256 * 4 * 16B =
16KB.
- The size of the cache in the previous diagram is 256 * 4 * 4B =
4KB.
- So you should not compare the performance of these two; of
course the bigger cache will do better.
- Instead the second cache should be reduced to 64 sets or the
first increased to 1024 sets.
Another size of interest is the total number of
bits in the cache, which includes tags and valid bits.
For the 4-way associative, 1-word per block cache shown above, this
size is computed as follows.
- The 32 address bits contain 8 bits of index and 2 bits
giving the byte offset.
- So the tag is 22 bits (more examples just below).
- Each cache entry contains 1 valid bit, 22 tag bits and 32 data
bits, for a total of 55 bits.
- There are 256*4=1K entries.
- So the total size is 55Kb (kilobits).
Question: For this cache, what fraction of the
bits are user data?
Answer: 4KB / 55Kb = 32Kb / 55Kb = 32/55.
Calculate in class the equivalent fraction for the last diagrammed
cache, having 4-word blocks (and still 4-way set associative).
Tag Size and Division of the Address Bits
We continue to assume a byte addressed machines with all references
to a 4-byte word.
The 2 LOBs are not used (they specify the byte within the word, but
all our references are for a complete word).
We show these two bits in white.
We continue to assume 32-bit addresses so there are 230
words in the address space.
Let us review various possible cache organizations and determine
for each the tag size and how the various address bits are used.
We will consider four configurations each a 16KB cache.
That is the size of the data portion of the cache
is 16KB = 4 kilowords = 212 words.
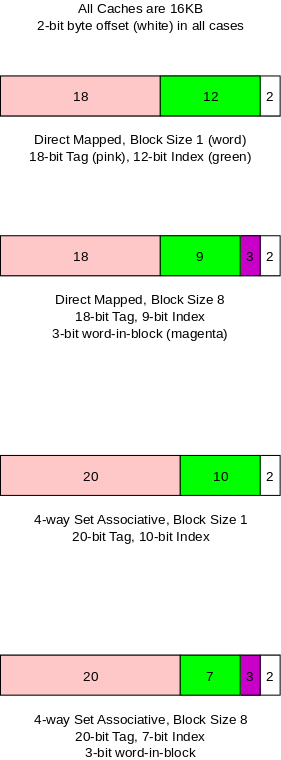
Direct Mapped, Block Size 1 (Word)
This is the simplest cache.
- Since the block size is one word, there are 230 memory
blocks and all the address bits (except the white 2 LOBs that
specify the byte within the word) are used for the memory block
number (MBN).
Specifically, 30 bits are so used.
- Any 16KB cache contains 214 bytes = 212
words, which, for this direct mapped, blocksize=wordsize cache,
is 212 blocks = 212 sets.
- Divide the MBN by the number of sets (NS).
The remainder, i.e., the low order 12 bits of the MBN gives the
index in the cache (the Cache Set Number, CSN) shown in
green.
- The quotient (the remaining 30-12=18 bits) is the tag, shown
in pink.
Direct Mapped, Block Size 8
Modestly increasing the block size is an easy way to
take advantage of spacial locality.
- Three bits of the address give the word within the 8-word block.
These bits are shown in magenta.
- The remaining 27 HOBs of the memory address give the memory
block number.
- The cache is still 212 words, but this is now only
29 blocks = 29 sets.
NCS=29.
- Divide MBN/NCS.
The remainder, the low order 9 green bits of the MBN gives the CSN, the
index in the cache.
- The remaining 27-9=18 pink bits are the tag.
4-Way Set Associative, Block Size 1
Increasing associativity improves the hit rate but
only a modest associativity is practical.
- The block size is 1 word so there are 230 memory
blocks and the MBN is again 30 bits.
- The cache has 212 words = 212 blocks =
210 sets (each set has 4=22 blocks).
- Divide MBN/NCS.
The remainder, the low order 10 bits of MBN gives the
index in the cache (the CSN).
- The 20 bit quotient is the tag.
- Question: Why does the tag get bigger as the
associativity grows?
Answer: Growing associativity (for a fixed size
cache) reduces the number of sets into which a block can be
placed, which increases the number of memory blocks eligible to be
placed in a given set.
Hence more bits are needed to see if the desired block is
there.
4-Way Set Associative, Block Size 8
The two previous improvements are often combined.
- Three low order magenta bits of the memory address give the word
within the block.
- The remaining 27 HOBs gives the MBN.
- The cache has 212 words = 29 blocks =
27 sets.
NCS=27.
- Divide MBN/NCS.
The remainder (the low order 7 bits) gives the index in the
cache.
- The remaining 20 bits form the tag.
On the board calculate, for each of the four caches, the memory
overhead percentage.
Homework: Redo the four
caches above with the size of the cache increased from 16KB to 64KB
determining the number of bits in each portion of the address as
well as the overhead percentages.
Start Lecture #24
Summary of Bit Division
Given the cache parameters and memory byte address (32-bits).
- Calculate MBN, the memory block number.
- Divide the byte address by 4 (drop low order 2 white bits)
to get the memory word address.
- Divide by #words/block (drop magenta bits used for word in
block).
- Calculate NCS, the number of cache sets (the number of rows in
the cache diagrams).
- NCB (num cache blks) = Cache size / blksize
- NCS = NCB / (num blks per set, i.e., the set size)
- Divide MBN / NCS.
The remainder is the set number, which is the index, i.e., the
row, in the cache).
These are low order (green) bits.
The quotient is the tag; these are high order (pink) bits.
First Example
The memory blksize is 1 word.
The cache is 64KB direct mapped.
To which set is each of the following 32-bit memory addresses
(given in hex) assigned and what are the associated tags?
- 1000000016
- 0101F00F16
- 1234567816
Answer.
Let's follow the three step procedure above for each address.
- 1000000016 = 228.
- The first step is to find MBN.
The memory word number for this address is 226
(there are 4 bytes in a word).
For this example the memory block number MBN is also
226, since the blocksize is one word.
- The second step is to find NCS.
We are given that the cache has size 64KB so it has
216 bytes or 214 words.
Since the blocksize is one word, the cache has
214 blocks and, since the set size is 1 (direct
mapped), NCS = 214/1 = 214.
- Divide MBN / NCS.
226 / 214 has quotient 212
and remainder 0.
So the set assigned to 1000000016 is set 0 and the
tag is 212.
- 0101F00F16
- Let's write the address in base 2 with a - between each
group of 4 bits.
So the address is 0000-0001-0000-0001-1111-0000-0000-1111.
That is the byte number, there are again 4 bytes in a block
so, to get the MBN, we need to divide the above number by 4,
which means drop the low order two bits.
This gives MBN=00-0000-0100-0000-0111-1100-0000-0011.
- The cache is the same as above so NCS=214.
- Divide MBN / NCS.
Since the divisor is again 214, the set assigned is
again the low order 14 bits of the MBN and the TAG is the
remaining high order bits.
Specifically the assigned set is 11-1100-0000-0011 =
1C0316 and the tag is
0000-0001-0000-0001 = 10116.
- 1234567816: This would be too error prone to do in
binary so is ruled out of contention.
Second Example
The memory blksize 64B.
The cache is 64KB, 2-way set associative.
To which set is each of the following 32-bit memory addresses
(given in hex) assigned and what are the associated tags?
- 1000000016
- 0101F00F16
- 1234567816: Ruled out of contention.
Answer. Same 3-step procedure.
- 1000000016 = 228.
- Now the blksize is 64=26 Bytes so the MBN =
228/26 = 222.
- NCB = 64KB / (26Bytes/Blk) = 210.
Set size is 2 so NCS = NCB / 2 = 29.
- Divide MBN / NCS.
222 / 29 = 213 remainder 0.
So the set assigned is set 0 and the tag is
213.
- 0101F00F16
- MBN = 0101F00F16 / 26 =
0000-0001-0000-0001-1111-0000-0000-1111 / 26 =
0100-0000-0111-1100-0000.
- NCS is still 29.
- Divide MBN / NCS.
The set number is the remainder (the low order 9 bits) and the
tag is the quotient (the remaining high order bits).
Specifically the set number is 1-1100-0000 = 1C016
and the tag is 10-0000-0011 = 20316.
Note: Should have last time calculated the memory
overhead percentage for some caches: (TotalSize-Size)/TotalSize.
Measuring Cache Performance
Clocks, Cycles. Rates. and Times
A clock on a computer is an electronic signal.
If you plot a clock with the horizontal axis time and the vertical
axis voltage, the result is a square wave as shown on the right.
A cycle is the period of the square
wave generated by the clock.
We shall assume the clock is a perfect square wave with all periods
equal.
Note: I added interludes because I realize that CS
students have little experience in these performance
calculations.
Interlude on Solving Rate and Time Equations
- A cycle (or clock cycle) is the time for the
clock to go from one transition from low to high voltage to the
next such transition.
- Herz means CPS, i.e., cycles per second.
It is a rate (like MPH) not a
time.
So a clock rate of 50 Hz means 50 cycles per second, which also
means 50 cycles = 1 second or 1 cycle = 1/50 second.
- Continuing with the same example 1 cycle = 2*10-2
sec. = 20*10-3 sec. = 20ms = 20,000*10-6 sec
= 20,000us = 20*106*10-9 =
20 million ns.
- KHz is kilohertz = 1,000Hz.
MHz is megahertz = 106Hz; GHz is gigahertz =
109Hz.
- Question: Which takes longer 1GHz or
10MHz?
Answer: Nonsense!
Hz is rate NOT time.
- Question: Which takes longer one cycle at 1GHz
or one cycle at 10MHz
Answer: 1GHz means 109 cycles = 1
sec; so 1 cycle = 10-9 sec.
10MHz means 10*106 cycles = 1 sec; so 1 cycle =
0.1*10-6 sec = 10-7 sec.
So a cycle at 10MHz takes 100 times as long as a cycle at
1GHz.
- Question: At a rate of 2GHz, how long is one
cycle?
Answer: 2GHz means 2*109 cycles = 1
second.
Hence 1 cycle = 0.5*10-9sec = 0.5ns
- Question: What megahertz clock has a 300ns
cycle time?
Answer: 300ns cycle time means 1 cycle = 300ns =
300*10-9 sec.
So 1 sec = (1/300)*109 cycles = (10/3)*106
cycles = 3.33MHz.
Interlude on Averages Given Base Plus Extra
- Question: In
2/5 of the cases X=A, in 3/5 of the cases X=B.
What is the average X?
Answer: (2/5)A + (3/5)B = (2A + 3B) / 5
- Question:
30% of cases X=A; the rest X=B.
What is the average X?
Answer: Average X =(30/100)A + (70/100)B
- Question:
p% of the cases X=A; rest X=B.
What is the average X?
Answer:
Average X = (p/100)A + ((100-p)/100)B
- Question:
p% of the cases X=A+E; rest X=A (E stands for extra).
What is the average X?
Answer:
Average X = (p/100)(A+E) + ((100-p)/100)A
= (p/100)A + (p/100)E + ((100-p)/100)A
= (100/100)A + (p/100)E = A + (p/100)E
- Question:
Base cost is 13; 17% of the cases have an extra cost of E.
What is the average cost?
Answer:
Average cost = 13 + (17/100)E = 13 + .17E
- CPI means cycles per instruction.
Base CPI means the CPI when all references hit in the cache.
Question:Base CPI = 13; 17% of refs miss cache
with a penalty of 8 cycles.
What is the overall CPI?
Answer:
Overall CPI = 13 + .17(8) = 14.36 cycles.
Start Lecture #25
Remark: I typed in the example we did last time on
the board.
The final answer became 20316.
I think I had 10316 last time.
Instruction and Data Caches
Modern processors have several caches.
We shall study just two, the instruction cache and the data cache,
normally called the I-Cache and D-Cache.
Every instruction that the computer executes has to be fetched from
memory and the I-Cache is used for such references.
So the I-cache is accessed once for every instruction.
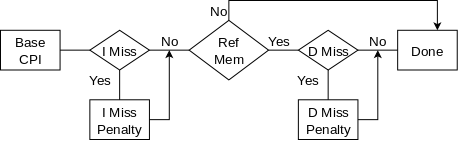
In contrast only some instructions access the memory for data.
The most common instructions making such accesses are
the load and store instructions.
For example the C assignment statement
y = x + 1;
generates a load to fetch the value of x and a store to
update the value of y.
There is also an add that does not reference memory.
The diagram on the right shows all the possibilities
If both caches have a miss, the misses are processed one at a
time because there is only one central memory.
An Example
We assume separate instruction and data caches.
Do the following performance example on the board.
It would be an appropriate final exam question.
- Assume
- 5% I-cache misses.
- 10% D-cache misses.
- 1/3 of the instructions access data.
- The CPI = 4 if there are no cache misses.
This (unrealistic) situation of no cache misses is sometimes
called the base CPI.
- What is the CPI if the miss penalty is 12 cycles?
- What is the CPI if we upgrade to a double speed
cpu+cache, but keep a single speed memory (i.e., a 24 cycle miss
penalty)?
- How much faster is the
double speed
machine?
It would be double speed if there was a 0% miss rate.
A lower base (i.e. miss-free) CPI makes misses appear more
expensive since waiting a fixed amount of cycles for the
memory corresponds to losing more instructions if the CPI
is lower.
A faster CPU (i.e., a faster clock) makes misses appear more
expensive since waiting a fixed amount of time for the memory
corresponds to more cycles if the clock is faster (and hence more
instructions since the base CPI is the same).
Start Lecture #26
A Second Example
- Assume
- I-cache miss rate 3%.
- D-cache miss rate 5%.
- 40% of instructions reference data.
- miss penalty of 50 cycles.
- Base CPI is 2.
- What is the CPI including the misses?
- How much slower is the machine when misses are taken into account?
- Redo the above if the I-miss penalty is reduced to 10 (D-miss
still 50)
- If the clock rate is 100MHz, how many instructions are executed
per second.
- With I-miss penalty back to 50, what is
performance if CPU (and the caches) are 100 times faster
Homework:
Consider a system that has a miss-free CPI of 2, a D-cache miss rate
of 5%, an I-cache miss rate of 2%, has 1/3 of the instructions
referencing memory, and has a memory that gives a miss penalty of 20
cycles.
- What is the CPI?
- If the clock rate is 1.5GHz, how many instructions per second
does the system execute.
- What would be the CPI if the memory was double speed, but
the CPU+caches remained the same as the original?
- What would be the CPI if the memory remained the
same as the original but the CPU+cache were double speed.
- How fast would the CPU+cache have to be so that
the system, with the original memory, was twice as fast as the
original?
Note:
Larger caches typically have higher hit rates but
longer hit times.
Virtual Address Caches vs Physical Address Caches
Virtual and Physical Addresses
We have been a little casual about memory addresses.
When you write a program you view the memory addresses as starting
at a fixed location, probably 0.
In OS we study this topic extensively.
Here I will give a very abbreviated treatment.
Monoprogramming
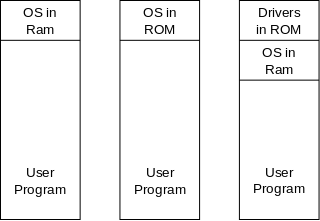
Way back when (say 1950s), the picture on the right was
representative of computer memory.
Each tall box is the memory of the system.
Three variants of the OS location are shown, but we can just use the
one on the left.
Note that there is only one user program in the system so, we can
imagine that it starts at a fixed location (zero if we like).
Using the appropriate technical terms we note that the
virtual address, i.e., the addresses in the
program, are equal to the physical addresses, i.e.,
the address in the actual memory (i.e., the RAM).
Simplest Multiprogramming
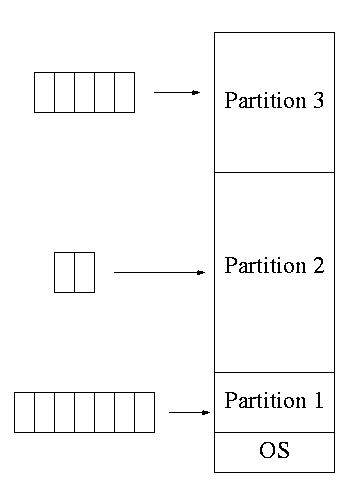
The diagram on the right illustrates the memory layout for
multiple jobs running on a very early IBM multiprogramming system
entitled MFT (multiprogramming with a fixed number of tasks).
When the system was booted (which took a number of minutes) the
division of the memory into a few partitions was established.
One job at a time was run in each partition, so the diagrammed
configuration would permit 3 jobs to be running at once.
That is it supported a multiprogramming level of 3.
If we ignore the OS or move it to the top of memory instead of the
bottom, we can say that the job in partition 1 starts in location 0
of the RAM, i.e., it logical addresses (the addresses in the
program) are equal to its physical addresses (the addresses in the
RAM).
However, for the other partitions, this situation does not hold.
For example assume two copies of job J are running, one copy in
partition 1 and another copy in partition 2.
Since the jobs are the same, all the logical addresses are the same.
However, every physical address in partition 2 is greater than every
physical address in partition 1.
Specifically, equal logical addresses in the two copies differ by
exactly the size of partition 1.
Multiprogramming Via Swapping
The picture below shows a swapping system.
Each tall box represents the entire memory at a given point in time.
The leftmost box represents boot time when only the OS is resident
(blue shading represent free memory).
Subsequent boxes represent successively later points in time
The first snapshot after boot time shows three processes A, B, and
C running.
Then B finishes and D starts.
Note the blue hole
where B used to be.
The system needs to run E but each of the two holes is two small.
In response the system moves C and D so that E can fit.
Then F temporarily preempts C (C is swapped out
then swapped
back in).
Finally D shrinks and E expands.
In summary, not only does each process have its own set of
physical addresses, but, even for a given process, the physical
addresses change over time.
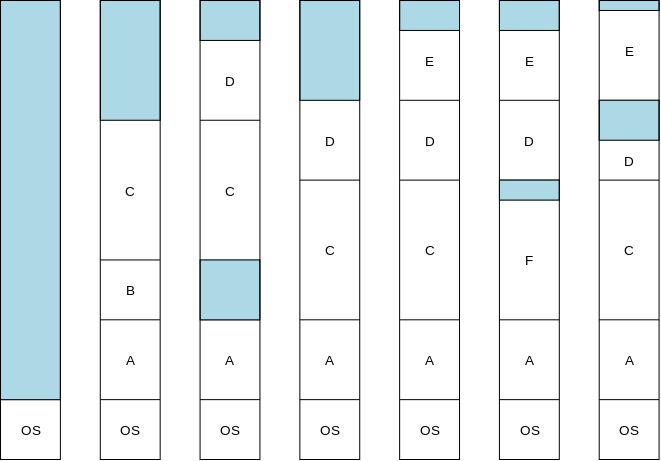
Paging
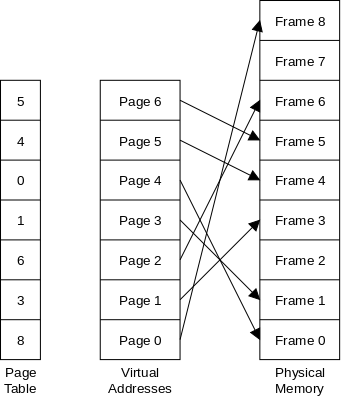
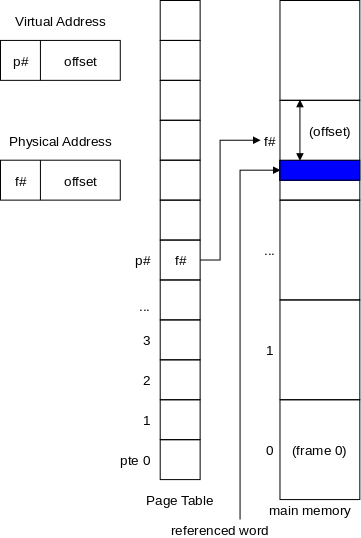
Now it gets crazy.
The moving of processes is an expensive operation.
Part of the cause for this movement is that, in a swapping system,
the process must be contiguous in physical memory.
As a remedy the (virtual) memory of the process is divided into
fixed size regions called pages and the physical memory is divided
into fixed sized regions called page frames or simply frames.
All pages are the same size; all frames are the same size; and the
page size equals the frame size.
So every page fits perfectly in any frame.
The pages are indiscriminately placed in frames without trying to
keep consecutive pages in consecutive frames.
The mapping from pages to frames is indicated in the diagram by the
arrows.
But this can't work!
Programs are written under the assumption that, in the absent of
branches, consecutive instructions are executed consecutively.
In particular, after executing the last instruction in page 4, we
should execute the first instruction in page 5.
But page 4 is in frame 0 and the last instruction in frame 0 is
followed immediately by the first instruction in frame 1, which is
the first instruction in page 3.
In summary the program has to be executed in the order given by
its pages, not by its frames.
This where the page table is used.
Before fetching the next instruction or data item, its virtual
address is converted into the corresponding physical address as
follows.
The virtual address divided into the page number and offset.
As we did with caches, we divide the virtual address by the page size
and look at the quotient and remainder.
The former is the page number and the latter the offset in the page.
We look up the page number p# in the page table to find the
corresponding frame number f# and apply the same offset we
calculated.
Demand Paging
The final step is that, in modern systems, it is no longer true
that the entire program is in memory at all times.
All pages are on disk.
Some pages are, in addition, in frames as indicated above, but for
others the page table simply lists that the page is not
resident.
A program reference to a non-resident page is called a page fault
and triggers much OS activity.
Specifically, an unused frame must be found (often by evicting its
current resident) and the referenced page must be read from the disk
into this newly available frame.
If the above sounds familiar, that is not surprising.
For the caching described in 201, the SRAM acts as a small/fast
cache of the big/slow DRAM.
For the demand paging just described the DRAM acts as a small/fast
cache
of the big/slow disk.
Start Lecture #27
Virtual Address Caches vs Physical Address Caches
Now that we understand the difference between virtual and physical
address, we can discuss the trade-off between caching based on
each.
We will only consider the paging system mentioned above.
The demand paging system is similar, but more complicated.
The methods before paging are no longer in active use.
Advantage of Virtual Addressed Caches: Speed
The address from the program itself is the virtual address, the
system then translates it to the physical address as described
above.
Thus with a virtual address based cache, the cache lookup can begin
right away; whereas, with a physical address based cache, the cache
lookup must be delayed until the translation to physical address
has completed.
Advantage of Physical Addressed Caches: No Aliasing
Many concurrently running processes will have the same virtual
addresses (for example all processes might start at virtual address
zero).
However, all these virtual address zeros are different physical
address and represent parts of different programs.
Hence they must be cached separately.
But to a straightforward virtual address cache the virtual address
zeros would all be assigned the same cache slot.
Instead the virtual address caching scheme adds complexity to the
cache hardware to distinguish identical
virtual address issued by different processes.
Cache Review
Do Another CPI Example
Material on Cache Size and Number of Bits from Lecture #23
Start Lecture #28
Reviewed caches again and answer students' questions.
As requested I wrote out another example.
Here it is.
Extra: One More Problem
At the end of the last class I was asked to do another problem with
sizes
.
In particular finding which address bits are the tag and which are
the cache index.
Extra.1: Basic Assumptions
In this class we will always make the following assumptions with
regard to caches.
- All addresses are 32 bits.
- The machine is byte addressable, so the 32-bit address
specifies a byte.
- All references from the process to memory (and hence to the
cache) are for a single 4-byte word
One conclusion is that the low-order (i.e., the rightmost) two
bits of the 32 bit address specifies the byte in the word and hence
are not used by the cache (which always supplies the entire
word).
Extra.2: The Cache in the Example
We will use the following cache.
- The size (not the total size) is 256KB.
- The blocksize is 8 words.
- The set size is 2 (i.e., we have a 2-way set associative
cache).
Extra.3: The General Procedure For Assigning the Address Bits
I use a three step procedure.
- Find which bits of a 32-bit memory address, give the MBN,
or
Memory Block Number
.
- Find the number of sets in the cache NS.
- Divide MBN by NS and look at the quotient Q and remainder
R.
Extra.4: The Problem to be Solved
For the cache just described
- Which address bits contain the tag?
- How big is each tag?
- How many lines (i.e., sets, i.e., rows) are in the cache?
- What is the total size of the cache?
Extra.5: Solving the Problem
We will use the three step procedure mentioned in Extra.2.
Extra.5.1: Finding MBN, the Memory Block Number
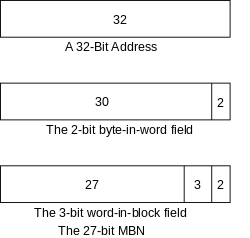
The top picture shows the 32-bit address.
The rightmost 2 bits give the byte in word, which we don't use
since we are interested only in the entire word not a specific byte
in the word.
That is shown in the second picture.
Note that there are 4 = 22 bytes in the word.
The exponent 2 is why we need 2 address bits.
The next 3 bits from the right give the word-in-block.
There are 8 words in the block (see Extra.2) and
8=23 so we need 3 bits.
The remaining 27 bits are the MBN.
Extra.5.2: Finding NS, the Number of Sets
You might prefer the abbreviation NCS (number of cache sets).
I often don't add the word cache because only caches have sets, but
neither term is standard so use whichever you prefer.
- The cache has 256KB = 218 bytes.
This is given above in Extra.2.
- 218 bytes is 216 4-byte words.
- 216 words is 213 8-word blocks.
- 213 blocks is 212 2-block sets.
So NS = 212, which answers question 3 of Extra.4
Extra.5.3: Dividing to Find the Cache Row (Set) and Tag
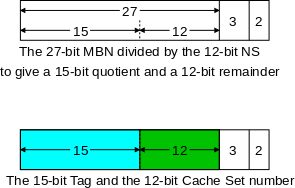
The MBN is 27 bits and NS is 212.
Dividing a 27-bit number by a 12-bit number gives a
(27-12)-bit quotient and a 12-bit remainder.
(This last statement is analogous to the more familiar statement
that dividing a 5-digit number by 100=102 gives a
(5-2)-digit quotient and a 2-digit remainder.
To divide a 5 digit
number by 100, you don't use a calculator, you just chop off the
rightmost 2 digits as the remainder and remaining (5-2) digits form
the quotient.
Example 54321/100 equals 543 with a remainder of 21.)
The remainder is the cache set (the row in a diagram of the cache).
It is shown in green.
In blue we see the quotient, which is the tag.
So to answer questions 1 and 2.
The high-order 15 (blue) bits form the 15-bit tag.
The Total Size of the Cache.
In the cache each 8-word block comes with a 15-bit tag and a 1-bit
valid flag.
Each of these cells
(I don't know if they have a name) thus
contains 8 32-bit words + 16 bits.
(I realize 16 bits is 2 bytes but often the number of bits is not
always a
multiple of 8.)
So each cell is 8*32+16 bits.
There are 2 cells in each set and 212 sets in the cache
so the total size of the cache is.
212 × 2 × (8×32 + 16) bits
What follows is NOT Part of the 2018-19 Course
Chapter T-1: Introduction to Computer Organization and Assembler Language
Homework: Read
Tanenbaum chapter 1 (T-1 above stands for Tanenbaum 1).
Remark: Everyone with a Windows laptop should
install cygwin as follows (I don't run windows so cannot test this
procedure; apparently it worked well last semester).
- Browse http://www.cygwin.com
- Click on
install now
.
- Where you are asked to select packages, choose
devel
and then check that the box in the bin
column next to
gcc
is checked.
This will ensure that the gcc compiler is included.
- Also in
devel
, select make
.
- Finally select
editor
and choose emacs
.
There are other editors available if you /prefer.
Remark: If you have a linux laptop (or dual
boot linux), you are set.
The gcc on linux supports both variants of assembler syntax for the
x86 CPU.
We will be using the Intel syntax
.
Remark: The mac story is interesting.
- Download XCode from the
Apple Developer Connection
.
- Pick up Carbon Emacs
here.
- Now the fun.
The version of gcc on the Mac does not use the same assembler
syntax (the intel syntax) that nearly everyone else uses.
You can fairly easily translate from the (ATT) syntax used to
the Intel syntax.
- Our machine i5.nyu.edu does not use an intel cpu (instead it
uses a SUN sparc), but I am getting the mac users accounts on a
departmental linux box, where you can select the intel
syntax.
- You can also install windows or Linux under MacOS; the gcc
under Linux or cygwin supports the Intel syntax.
Remark: Midterm exams returned.
If you did not read the mailing list, please read my comment on the
exam and midterm (letter) grades.
You can find it off the course home page (announcements).
Remark:
Some comments on catDiff from the midterm.
- Many forgot to allocate space for various strings.
The maximum penalty (no allocations) was -3.
- Several had trouble with this construct
char *str1 = "something";
char *str2 = str1;
They said char *str2 = *str1;
I can see why as it looks symmetric.
Remember you are declaring str2 not *str2.
Remark: Preview on final project.
You will be writing a (trivial) video game.
For now, install the graphics library and put up a picture
(find a *.bmp file).
Here is the installation procedure
- Browse libsdl.org.
- Click on the SDL 1.2 link on the left column.
Note where the file is downloaded.
- If necessary, move the file to your home directory.
On Cygwin, your home directory is c:\cygwin\home\yourname).
- In the shell (under cygwin) type
tar -xvfz SDL-1.2.14.tar.gz.
- Type cd SDL-1.2.14
- Type ./configure
If this fails try ./configure CC=/usr/bin/gcc-3 CXX=/usr/bin/g++-3
- Type make
- Type sudo make install.
If this fails try simply make install
If both fail, try $@ make install
You may be asked for your password (for your computer, not for an
NYU machine).
If you run as administrator, I don't believe you will be asked.
- Type cd test
- Type ./configure
If this fails try ./configure CC=/usr/bin/gcc-3 CXX=/usr/bin/g++-3
- Type make
- Type ./testsprite
- Gasp, in awe.
Here is a windows/cygwin tip from Prof. Goldberg.
Be sure that the name of your home directory does not have a space
in it.
For example, if your name is Joe Smith, be sure that your home
directory on cygwin is not "c:\cygwin\home\joe smith", but rather
something like "c:\cygwin\home\joe_smith".
The SDL configure function gets confused by spaces in a directory
name.
If cygwin has created your home directory name with a space, change
the name of the directory using Windows.
Then, create an environment variable called HOME and set it to
c:\cygwin\home\joe_smith, except with joe_smith
replaced by the actual name of your home directory.
To set an environment variable in Windows, go to
Start->Control Panel->System->Advanced->Environment Variables.
It should be obvious from there.
Let me call the subdirectory SDL-1.2.14 the sdl
directory.
In there you will find a README file containing the web address of a
wiki about the library
Browse that wiki and follow the guide.
I had never used any of this before and within 20 minutes I had a
picture up.
Chapter T-2: Computer Systems Organization
Some diagrams of the overall structure of a computer system are in
section 1.3 of
my OS class notes
T-2.1: Processors
The processor (or CPU, Central Processing Unit) performs the
computations on data.
The data enter and leave the system via I/O devices and are stored
in the memory (the last part is over simplified as you will learn in
OS, but it is good enough for us).
T-2.1.1: CPU Organization
Simple processors have (had?) three basic components, a register
file, an ALU (Arithmetic Logic Unit), and a control unit.
Oversimplified, the control unit fetches the instructions and
determines what needs to be done, the data to be processed is often
the registers (which can be accessed much faster than
central memory) and the ALU performs the operation (e.g.,
multiply).
In addition to the (assembly-language) programmer-visible registers
mentioned above, the CPU contains several internal registers, two of
which are the PC (Program Counter, a.k.a. ILC or LC), which
contains the address of the next instruction to execute and the
Instruction Register (IR), which contains (a copy of) the
current instruction.
T-2.1.2: Instruction Execution
There are three parts to executing an instruction: obtain the
instruction, determining what it needs to do, and doing it.
Repeatedly performing these three steps for all the instructions in a
program, is normally referred to as the
fetch-decode-execute cycle.
In slightly more detail, the CPU executes the following program
.
- Fetch the next instruction into the IR.
- Update the PC.
- Determine the type of the instruction.
- If memory is referenced, determine the address.
- Fetch the referenced word, if needed, into a register.
- Execute the instruction.
- Repeat.
Architecture vs. Micro-Architecture
The architecture is the instruction set, i.e., the
(assembly-language) programmer's view of the computer.
The micro-architecture is the design of the computer, it is the
architect's/designer's/engineer's view of the system.
The interesting case is when you have a computer family
,
e.g., the IBM 360 or 370 line, the x86 microprocessor architecture,
which has several different implementations, with different
microarchitectures.
T-2.1.3: RISC vs. CISC
Reduced Instruction Set Computer versus Complex Instruction Set
Computer.
Clear implementation advantages for RISC.
But CISC has thrived!
Intel found an excellent RISC implementation of most of the very
CISC x86.
T-2.1.4: Design Principles for Modern Computers
The RISC design principles
below are generally agreed to be
favorable, but are not absolute.
For example backwards-compatibility
with previous systems,
force compromises.
- All instructions executed directly by hardware (not
interpreted by microinstructions).
- Maximize instruction issue rate (e.g., easy to find where the
next instruction begins).
- Instructions should be easy to decode.
- Only loads and stores reference memory.
- Provide ample registers.
Remark: I mentioned the wrong
guide last
time.
The notes are now correct.
T-2.1.5: Instruction Level Parallelism
Skipped.
T-2.1.6: Processor-Level Parallelism
Skipped.
T-2.2: Primary Memory
T-2.2.1: Bits
Abbreviates binary digit
, which is rather contradictory.
T-2.2.2: Memory Addresses
The smallest addressable unit of memory is called a
cell.
Recently, for nearly all computers, a cell is an 8-bit unit called a
byte (or octet).
Bytes are grouped into words, which form the units on which
most instructions operate.
T-2.2.3: Byte Ordering
This has caused decades of headaches.
Memory is addressed in bytes.
But we also need larger units, e.g., a 4-byte word.
If memory contains a big collection of bytes, the bytes are stored
in address 0, 1, 2, 3, etc.
If memory contains a big collection of words, the words are stored
in address 0, 4, 8, 12, etc.
So far no problem.
Consider a 32-bit integer stored in a (4-byte) word.
If the integer has the value 5 then the bit string will be
00000000|00000000|00000000|00000101.
So the lower order byte of the integer is 00000101 and the three
high order bytes are each 00000000.
Still no problem.
Let's assume this is the first word in memory, i.e., the one with
address 0.
It contains 4 bytes: 0, 1, 2, and 3.
We are closing in on the problem.
Which of those four bytes is the low order byte of the word.
Answer from IBM: byte 3 (IBM machines are big endian
.
Answer from Intel: byte 0 (Intel processors are little
endian
.
Either answer makes sense and if you stay on one machine, there is
no problem at all since either system is consistent.
But let try to move data from one machine to another.
Say we have an integer containing 5 (as above) and a
4-byte character string "ABC" stored on an IBM machine.
The layout is
00000000 00000000 00000000 00000101 A B C 00000000
0 1 2 3 4 5 6 7
The ABC are expressed in bits, but the specific bit string
is not important.
The last byte of all 0s is ...
the ascii null ending the string.
We send these 8 bytes via ethernet to an Intel machine where we
again store them starting at location 0, and get the same layout as
above.
However, byte 3 is now the most-significant (rather than the
least-significant) byte.
Gack.
The integer 5 has become 5*(256)3!
If the internet software reverses every set of four bytes, we fix
the integer, but screw up the string.
T-2.2.4: Error-Correcting Codes
The Hamming Distance between two equal-length bit strings
is the number of bits in which they differ.
If you arrange that all legal bit strings have Hamming distance at
least 2 from each other than you can detect any
1-bit error.
This explains parity.
More generally if all legal bit strings have Hamming distance at
least d+1, then you can detect any d-bit error
since changing d bits of a legal string cannot reach another
legal string.
To enable correction of errors you need greater
Hamming distances: specifically Hamming distance 2d+1 is
needed to enable correction of d bits.
This is not too hard to see.
If you have a valid string and change d bits, the result
is at distance from the original valid string and at least distance
d+1 from any other valid string (since the valid strings
are at least 2d+1 apart.
The harder part is designing the code.
That is, given n, assume you are storing and fetching
n data bits at a time, how many extra check bits
must be stored and what must they be in order that all the resulting
strings are at least distance d apart?
The book gives Hamming's method, but we are skipping the algorithm
and are content with just one fact.
If the size of the data word is 2k (i.e., the number of
bits in a word is 2k), then k+1 check
bits are necessary and sufficient to obtain a code that can
correct all single-bit errors and can detect all double-bit
errors.
For example if we are dealing with bytes, k is 3 so 4
check bits are required; a heavy overhead (4 check bits for every
8 data bits).
If we are only transporting 64-bit words, k is 6 and 7
check bits are required, which is a much milder overhead.
Remark: Term Project assigned.
Due in three weeks, 27 apr 2010
T-2.2.5: Cache Memory
The ideal memory is
- Big
- Fast
- Cheap
- Impossible
Commodity memory is big, slow, cheap, and possible.
Caches are small, fast, cheap enough because they are small, and
possible.
Concentrating on the first two criteria we can build
big and slow
and we can build small and fast
, but we
want big and fast
.
This is where the idea of caching comes in.
A cache is small and fast.
A significant portion of its speed is because it is close to the CPU
and clearly if an object is big its (average or worst-case) distance
from another object can't be small.
For example, no matter where you park a car you can't have all (or
half) of it within a foot of a given point.
The idea of caching is that we arrange (somehow) for almost all of
the important
data to be in the small, fast cache and use the
big and slow memory to hold the rest (actually it holds all the
data).
Since the portion of memory that is important changes with time,
caches exchange data with memory as the program executes.
With clever algorithms for choosing which data to exchange with
memory, surprisingly small caches can service a great deal of the
memory activity of the processor.
There is no reason to stop with just one cache
level
.
Today it is common to have a tiny, blistering-fast level-1 cache
connected to a small, real-fast level-2 cache connected to a
medium-size, fast level-3 cache connected to huge, slow memory.
This same issue of a small, fast red-memory supporting a large,
slow blue-memory is studied in Operating Systems (202).
In the OS setting, the small and fast memory is our big and slow
central memory and the big and slow OS memory is a disk.
Unfortunately, nearly all the terminology in the OS case (demand
paging) is different from the terminology in the computer design
case (caching).
T2.2.6: Memory Packaging and Types
T-2.3: Secondary Memory
T-2.3.1: Memory Hierarchies
The example of multiple cache levels, can be carried further.
The processor registers are smaller and faster than a cache.
As mentioned disks are bigger and slower than central memory,
and robotic-accessed, tape storage is bigger and slower than a disk.
Again the goal is to use smarts to approximate the impossible
big and fast and cheap
storage.
T-2.3.2: Magnetic Disks
Disks are covered in OS (202) so we will just define some terms
(plus I demo'ed a bunch of disks last class).
- Platter
- Surface
- Head
- Track
- Sector
- Cylinder
- Seek time:
Average case times are given and often the minimum, which is
from one cylinder to the next one.
- Rotational latency:
Given as the RPM or given directly in milliseconds.
- Transfer rate:
Given directly as MB/sec or indirectly by RPM and track
capacity.
Homework: 19.
T-2.3.2: Floppy Disks
Demoed last class.
T-2.3.4: Ide Disks
Describes the specific protocol, cabling, and speed.
T-2.3.5: Scsi Disks
Describes the specific protocol, cabling, and speed.
T-2.3.6: RAID
Done in OS (202).
T-2.3.7: CD-ROMs
Done in OS (202).
Just one comment, unlike magnetic disks CD-ROMs and friends do not
have circular tracks; instead the data spirals out from the
center.
T-2.3.8: CD-Recordables (CD-R)
Done in OS (202).
T-2.3.9: CD Rewritables (CD-RW)
Done in OS (202).
T-2.3.10: DVD
Done in OS (202).
T-2.3.11: Blu-Ray
Done in OS (202).
T-2.4: Input/Output
T-2.4.1: Buses
Last class I demoed a computer main board
(a.k.a. motherboard
, system board
, or mobo
) and
showed the slots where a controller would plug it.
I brought in an ethernet controller that fit onto the PCI bus
of the main board.
The different busses (PCI, PCIe, SCSI, ATA, etc) describe the wiring
and protocols used to connect the different controllers to the CPU.
T-2.4.2: Terminals
Keyboards
Done in 202
CRT Monitors
Obsolete.
Flat Panel Displays
Very important, but a little too much engineering-oriented for us
to cover.
You might want to read it for you own curiosity.
Video RAM
One value per pixel on the screen.
These values together are often called a bit map.
In fact systems often contain several but maps to enable fast
switching.
T-2.4.3: Mice
Covered in 202.
T-2.4.4: Printers
Monocrome Printers
Color Printers
T-2.4.5: Telecommunications Equipment
Modems
Digital Subscriber Lines (DSL)
Internet over Cable
T-2.4.6: Digital Cameras
T-2.4.7: Character Codes
ASCII
Unicode
T-2.5: Summary
Read.
Chapter T3: The Digital Logic Level
This is the bottom of the abstraction hierarchy.
T-3.1: Gates and Boolean Algebra
T-3.1.1: Gates
(Bipolar) Transitors and the Device Level
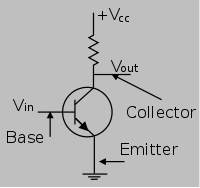
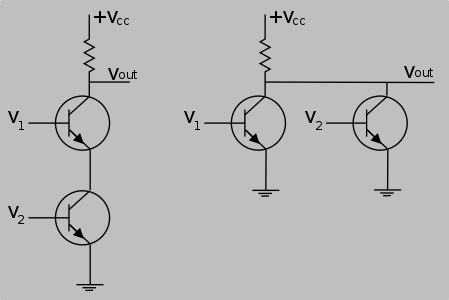
When the Base is high (positive voltage, say 5 volts,
a digital 1
) the transistor turns on
, i.e., acts
like a wire and the Collector is pulled down
to ground
(zero volts, a digital zero
).
When the Base is low (zero volts, a digital zero), the transistor
turns off
, i.e., acts like an open circuit.
Thus the collector is essentially the same as the voltage supply
+Vcc; it is a digital one.
Summary, when the base is zero, the collector is one; and vice
versa.
That is, viewing the base as the input and the collector as the
output.
The logic function f having the property that
f(0)=1 and f(1)=0 is called an inverter.
NAND and NOR
NAND and NOR
The diagram on the right shows two additional logic functions
built from transistors.
These logic functions take two arguments and are called
NAND (not and) and NOR (not OR)
respectively.
Ignoring the above, which is one level below what we are studying,
we define 5 logic gates by the truth tables given below their
diagrams.
NAND Truth Table
| A | B | X |
| 0 | 0 | 1 |
| 0 | 1 | 1 |
| 1 | 0 | 1 |
| 1 | 1 | 0 |
NOR Truth Table
| A | B | X |
| 0 | 0 | 1 |
| 0 | 1 | 0 |
| 1 | 0 | 0 |
| 1 | 1 | 0 |
AND Truth Table
| A | B | X |
| 0 | 0 | 0 |
| 0 | 1 | 0 |
| 1 | 0 | 0 |
| 1 | 1 | 1 |
OR Truth Table
| A | B | X |
| 0 | 0 | 0 |
| 0 | 1 | 1 |
| 1 | 0 | 1 |
| 1 | 1 | 1 |
XOR Truth Table
| A | B | X |
| 0 | 0 | 0 |
| 0 | 1 | 1 |
| 1 | 0 | 1 |
| 1 | 1 | 0 |
Homework: Using truth
tables prove DeMorgans Laws
NOT(A AND B) = (NOT A) OR (NOT B)
NOT(A OR B) = (NOT A) AND (NOT B)
Homework
Show that all Boolean functions with two inputs (and one output) can
be generated by just using NAND.
This can be done two ways.
- Draw all the possible truth tables and for each draw a circuit
with just NAND that generates that same truth table.
- Show how to get NOT, AND, and OR from just NAND and then show
how any truth table can be generated from NOT, AND, and OR,
The book does method 2 in section 3.1.3.
You should do method 1.
How many truth tables are there?
Remark: The honors supplement has been added to
the final project.
Jumped to Chapter T-5 (for assembler part of term project)
T-3.1.2: Boolean Algebra
Using truth tables, we can prove various formulas such as
DeMorgan's Laws from the last homework.
From these laws we can prove other laws.
Standard notation is to use + for OR, * for AND, and ⊕ for
XOR (exclusive or).
As in regular algebra the * is often dropped.
From these formulas, and algebraic manipulation we can get other
formulas.
This is called Boolean algebra (named after George Boole).
For example (I am using ' to signify NOT),
you use truth tables to prove both distributive laws
A(B+C) = AB + AC * has higher precedence than +
A+(BC) = (A+B)(A+C) looks wrong but is correct
and then calculate
A+(A'B) = (A+A')(A+B) NOT has higher precedence than + or *
= (1)(A+B) 1 is the constant function (true)
= A+B 1 is the * identity (truth table)
T-3.1.3: Implementation of Boolean Functions
There is a standard procedure to generate any Boolean function
using just AND, NOT, and OR.
I did an example of this last time.
Here is the general procedure.
- Write the truth table.
- Generate
rails
with each input and its complement.
- Use an AND for each set of inputs with a 1 in the result
column of the truth table.
- Wire the ANDs to a final OR
T-3.1.4: Circuit Equivalence
As we have seen the same truth table can result from different
Boolean formulas and hence from different circuits.
Naturally, circuit designers might prefer one over the other
(faster, less heat, smaller, etc.
T-3.2: Basic Digital Logic Circuits
T-3.2.1: Integrated Circuits
I showed a discrete circuit last time as well as a Pentium II main
board containing many integrated circuits.
Initially these circuits had only a few components; now they have
millions.
T-3.2.2: Combinational Circuits
These are circuits in which the outputs are uniquely determined by
the inputs.
Isn't this always true?
Certainly not!
Some circuits have memory (i.e., RAM).
If you give a ram an input of (12,read) the output is the last value
that was stored in 12.
So you need to know more than (12,read) to know the answer;
you need to know the history.
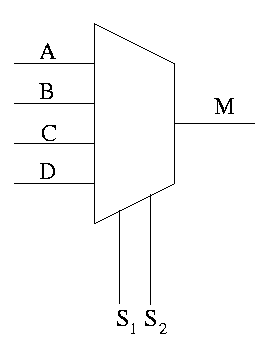
Multiplexors (Muxes)
Have 2n inputs plus n select inputs.
The select inputs are read as a binary value and thus specify a
number from 0 to 2n.
This number is used to select one of the inputs to be the output.
Construct on the board an equivalent circuit with ANDs and ORs in
three ways:
- Construct the truth table (64 rows!) and write the sum of
products form, one product (6-input AND) for each row and
a gigantic 64-way OR.
Just start this, don't finish it.
- A simpler (more clever) two-level logic solution.
Four ANDS (one per input), each gets one of the inputs and both
select lines with appropriate bubbles.
The four outputs go into a 4-way OR.
- Construct a 2-input mux (using the clever solution).
Then construct a 4-input mux using a tree of three 2-input
muxes.
One select line is used for the two muxes at the base of the
tree, the other is used at the root.
Decoders (and Encoders)
Imagine you are writing a program and have 32 flags, each of which
can be either true or false.
You could declare 32 variables, one per flag.
If permitted by the programming language, you would declare each
variable to be a bit.
In a language like C, without bits, you might use a single 32-bit
int and play with shifts and masks to store the 32 flags in this one
word.
In either case, an architect would say that you have these flags
fully decoded.
That is, you can detect the value of any combination of the
bits.
Now imagine that for some reason you know that, at all
times, exactly one of the flags is true and the
other are all false.
Then, instead of storing 32 bits, you could store a 5-bit integer
that specifies which of the 32 flags is true.
This is called fully encoded.
A 5-to-32
decoder converts an encoded 5-bit signal into 32
signals with exactly one signal true.
A 32-to-5
encoder does the reverse operations.
Note that the output of an encoder is defined
only if exactly one input bit is
set (recall set means true).
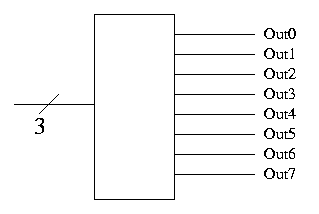
The diagram on the right shows a 3-to-8 decoder.
- Note the
3
with a slash, which signifies a three bit
input.
This notation represents three (1-bit) wires.
- A decoder with n input bits, produces 2n output
bits.
- View the input as
k written as an n-bit binary number
and view the output as 2n bits with the k-th bit set
and all the other bits clear.
- Implement the 3-to-8 decoder on the board with simple gates.
- Why do we use decoders and encoders?
- The encoded form takes (MANY) fewer bits so is better for
communication.
- The decoded form is easier to work with in hardware since
there is no direct way to test if 3 wires represent a 5
(101).
You would have to test each wire.
But it easy to see if the encoded form is a five; just test
the fifth wire, out5.
The truth table for an 8-3 encoder has 256 rows; for a 32-5 decoder
we need 4 billion rows.
There is a better way!
Make use of the fact that we can assume
exactly one input is true.
For each output bit, OR the inputs that set this bit.
For example the low-order output of an 8-3 is the OR of input bits
1,3,5,7.
Comparators
Programable Logic Arrays (PLAs)
T-3.2.3: Arithmetic Circuits
Shifters
Do you want to rotate/0-fill/sign-extend?
Do you want to shift left or right?
Use muxes to give all the choices you want.
The operation
forms the select lines.
Adders
Draw a half adder (AND and XOR) that takes two inputs and produces
two outputs, the sum and the Carry-out.
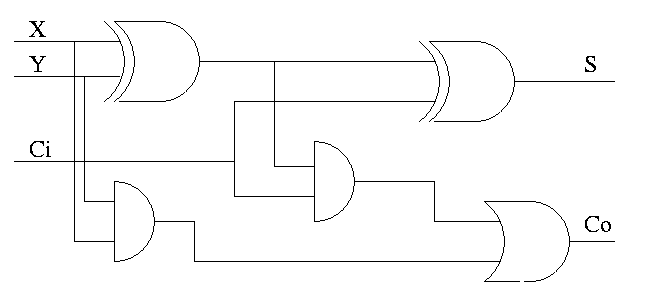
Full Adder
Full Adder
Really we want a full adder that has three inputs (A, B, Carry-in)
and produces two outputs (Sum, Carry-out).
The Sum equals the total number of 1s in A, B, and Ci is odd
.
The Carry-out is at least two of A, B, and Ci are 1
.
The diagram above uses logic formulas for Sum and Carry-out
equivalent to the definitions just given (see homework just
below).
Homework:
- Draw the truth table for the full adder (8 rows) based on the
definition.
Note that the circuit has 3 inputs and 2 outputs so the truth
table has 3+2=5 columns and 23=8 rows (the second 2
is NOT the number of outputs).
- Show S = X ⊕ Y ⊕ Ci
- Show Co = XY + (X ⊕ Y)Ci
T-3.2.4: Clocks
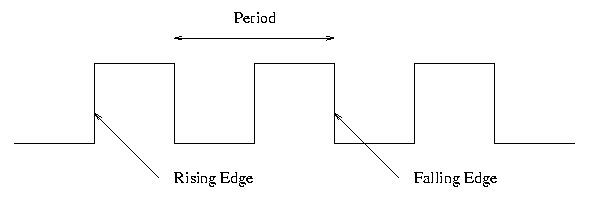
The period is also called the cycle time.
The number of cycles per second/hour/day/etc is called the frequency.
So a clock with a 2 nanosecond cycle time has a frequency of 1/2 a
gigahertz or 500 megahertz (one hertz is one cycle per second).
T-3.3: Memory
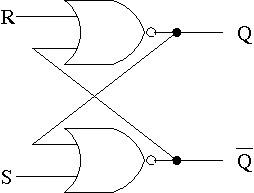
T-3.3.1: Latches
The only unclocked memory we will use is a so called S-R latch
(S-R stands for Set-Reset).
When we define latch
below to be a
level-sensitive, clocked memory, we will see that the S-R latch is
not really a latch.
The circuit for an S-R latch is on the right.
Note the following properties.
- The S-R latch is constructed from
Cross-coupled
nor
gates.
- Consider the four possible inputs.
- We do NOT assert both S and R at the same
time (the output is not defined in this case).
- When S is asserted (i.e., S=1 and R=0):
- The latch is Set (that's why it is called
S).
- Q becomes true (Q is the output of the latch).
- Q' becomes false (Q' is the complemented output).
- When R is asserted:
- The latch is Reset.
- Q becomes false.
- Q' becomes true.
- When neither one is asserted:
- The latch retains its value, i.e. Q and Q' stay as they
were.
- This last statement is the memory aspect.
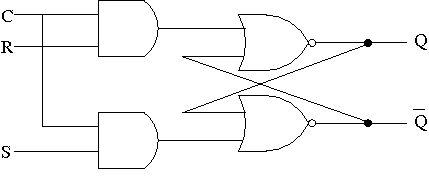
Clocked SR Latches
The clocked version on the right has the property that the values
of S and R are only relevant when the clock is high (i.e., true not
false).
This is sometimes convenient, but we will not use it.
Instead we will use the important D-latch that we describe next that
is very similar.
Clocked D Latches
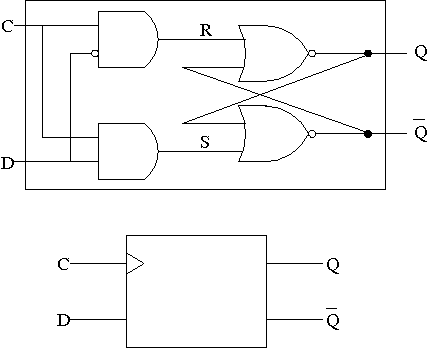
The D stands for data.
The extra inverter (the bubble on the top left) and the rewiring
prevents R and S from both being 1.
Specifically, there are three cases.
- When the clock is low (false), both R and S are false and, as
we saw before, Q and Q' remain unchanged.
- When the clock is high and D is high, Q becomes true and Q'
false.
- When the clock is high and D is low, Q becomes fales and Q'
becomes true.
The summary is that, when the clock is asserted, the latch takes on
the value of D, which is then held while the clock is low.
The value of D is latched when the clock is high and held while the
clock is low.
The smaller diagram shows how the latch is normally drawn.
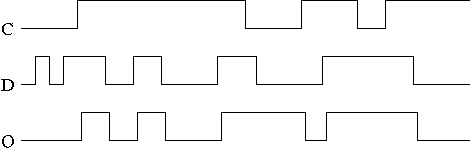
In the traces to the right notice how the output follows the input
when the clock is high and remains constant when the clock is low.
We assume the stored value was initially low.
Remark: Grishman did 4-bit adders and subtracters.
If you wish (on line) pictures, you can look at my
architecture notes.
T-3.3.2: Flip-Flops
D or Master-Slave Flip-flop
This structure was our goal.
It is an edge-triggered, clocked memory.
The term edge-triggered means that values change at edges of the
clock, either the rising edge or the falling edge.
The edge at which the values change is called the active edge.
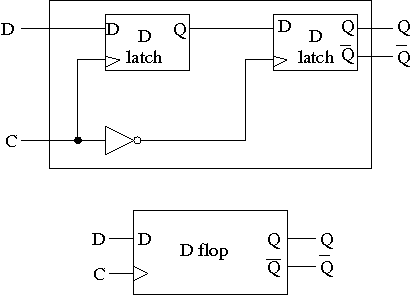
The circuit for a D flop
is on the right.
It has the following properties.
- The D-flop is built from D-latches, which are transparent, i.e
the output equals the input when the clock is high.
- The flop, however, is Not transparent
- Changes to the output occur only at the active edge.
- The circuit in the diagram has the falling edge as active.
edge.
- The structure is sometimes called a master-slave flip-flop:
the left latch is the master and the right the slave.
- The substructures reuse the same letters as the main structure
but have different meaning (similar to block structured
languages in the algol style).
- The master latch is set during the time the clock is asserted.
Remember that the latch is transparent, i.e. it follows its
input when its clock is asserted.
But the second latch is ignoring its input at this time.
When the clock falls, the 2nd latch pays attention and the first
latch keeps producing whatever D was at fall-time.
- Actually D must remain constant for some time around
the active edge.
- The set-up time before
the edge.
- The hold time after the
edge.
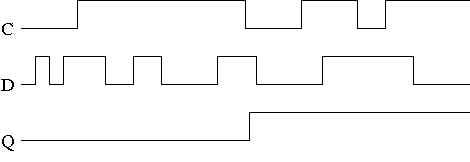
The picture on the right is for a master-slave flip-flop.
Note how much less wiggly the output is in this picture than before
with the transparent latch.
As before we are assuming the output is initially low.
Homework:
In the D-flop diagram, move the inverter to the other latch, i.e.,
the inverted clock goes to the left latch and the positive clock
goes to the right.
What has changed in the D-flop?
Homework:
Which code better describes a flip-flop and which a latch?
repeat {
while (clock is low) {do nothing}
Q=D
while (clock is high) {do nothing}
} until forever
repeat {
while (clock is high) {Q=D}
} until forever

Show how to make a register out of FFs (easy just use a bunch).
Show how to make a register file out of registers.
Not too hard use a BIG mux.
Describe how to write a register.
Actually the trick is how to not write a
register.
Recall that the constituent FFs are written at every falling edge.
The idea is to introduce a signal that is ANDed with the clock to
eliminate edges you don't want (this takes some care).
Then the diagram on the right shows the basic workings of a
register based ADD (or SUB or OR or AND)
add regA,regB,regC
Chapter T-4: The Microarchitecture Level
Chapter T-5: The Instruction Set Architecture Level
Remark: We jump ahead (out of order)
so that I can cover enough x86 assemble language for you to do the
assembler portion of the project.
I am not following Tanenbaum's order here as the goal is just x86.
Remark: I believe
this reference
is a good resource for x86 assembly programming.
T-5.1: Overview of the ISA Level
5.1.1: Properties of the ISA Level
5.1.2: Memory Models
5.1.3: Registers
5.1.4: Instructions
T-5.1.5: Overview of the Pentium 4 ISA Level
In order to maintain compatibility with previous, long-out-of-date
members of the x86 processor family, modern members can execute in
three modes.
- Real Mode:
The processor acts just like a
1979 8088, the processor used in the original PC.
If any program screws up, the machine crashes.
If Intel had designed human beings, it would have put in a bit
that made them revert back to chimpanzee mode (most of the
brain disabled, no speach, sleeps in trees, eats mostly
bananas, etc.)
While perhaps humorous (Tanenbaum certainly writes well) the quote
does hide the tremendous user advantages of having a new computer
that can still execute old (often awful) programs, in particular
old games, which were notorious for not being clean.
- Virtual 8086/8088 mode: Now if a program crashes
the OS is notified, rather than having the machine crash.
I am not sure why (indeed, if) real mode is still needed, i.e.,
why virtual 8086 mode did not simply replace it.
- Protected mode: This is the mode we will study
and is the mode used by all modern operating systems and
applications.
Registers on the x86
We will mainly use the 32-bit registers, their names begin with E
standing for extended.
They extended the 16-bit registers of early members of the family.
The four main registers are EAX, EBX, ECX, and EDX.
Each is 32 bits.
We will make most use of EAX, which is the main arithmetic register.
Also functions returning a single word, return this in EAX.
mov EAX ECX
mov EAX [EBX]
mov EAX [EBX+4]
If an address is in any one of these four the contents of that
address can be specified as an operand for an instruction.
Also an offset can be added.
For example the first instruction on the right simply copies (the
contents of) ECX into EAX.
The second instruction does a de-reference.
If EBX contains 1000, the contents of memory location 1000 is loaded
into EAX.
Finally, the last instruction would load the contents of 1004 into
EAX (again assuming EBX contains 1000).
As you can see from the sheet I handed out and from Tanenbaum's
figure 5-3, these registers contain named 16-bit and 8-bit subsets.
The two registers ESI and EDI are mostly used for the hardware
string manipulation instructions.
I don't think you will need those instructions, but you can also use
ESI and EDI to hold other values (scratch storage).
The EBP register is normally used to hold the frame pointer FP,
that will be described below.
The ESP is the stack pointer (again described below).
5.1.6: Overview of the UltraSPARC III ISA Level
5.1.7: Overview of the 8051 ISA Level
5.2: Data Types
T-5.2.1: Numeric Data Types
T-5.2.2: Nonnumeric Data Types
T-5.2.3: Data Types on the Pentium 4 (x86)
The x86 architecture supports signed and unsigned integers of three
sizes.
- 8 bit (one byte): used for ascii characters (C char).
- 16 bit (two bytes): used for unicode characters and for 16-bit
integers (C short int).
- 32 bit (4 bytes): used for integers (C int).
There is also support for 32-bit and 64-bit floating point, which
are used for C float and double respectively.
Finally, there is support for 8-bit BCD (binary coded decimal),
which is not used in C.
T-5.2.4: Data types on the UltraSPARC III
T-5.2.5: Data types on the Java Virtual Machine
T-5.2A: Argument Passing from C to Assembler on x86
This is not from the book.
Since you will be writing an assembler subroutine called by a C
program and your subroutine might call another C program, we need to
understand how arguments, the return address, and the returned value
are passed from caller to callee.
The short answer is via the stack
.
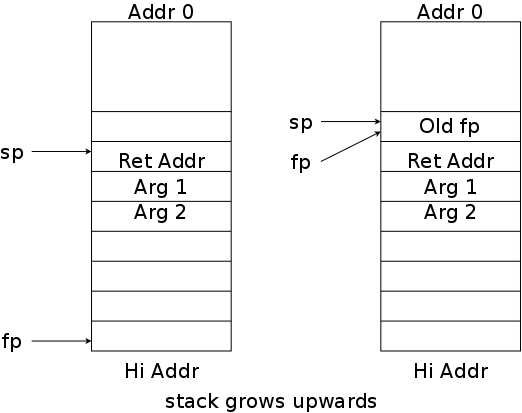
Each routine places its local variables on the stack, a region of
memory that grows and shrinks during execution.
(We are ignoring variables created via malloc as they are not
allocated on the stack.)
Due to the lifo nature of calls and returns, stack allocation works
perfectly for such variables.
As shown in the diagrams, the stack starts at a high address and
grows towards location zero
Each routine uses a region of the stack called its
stack frame or simply frame.
The C convention (really the C-compiler convention) is that the
frame is specified by two pointers: the frame pointer fp,
which points to the beginning (bottom) of the frame, and the stack
pointer sp that points to the current end (top) of the
frame.
As the routing places more information on the stack, sp
moves (towards 0) to enlarge the stack.
As the routine removes entries at the top of the stack,
sp again moves (in this case away from 0).
In the left diagram the currently running procedure has just called
another procedure.
The caller has pushed the arguments onto the stack (in reverse
order) and then pushed the return address (actually the call
instruction did the last part).
Also the caller has saved EAX, ECX, and EDX if necessary (these are
referred to as caller-save
registers).
.intel_syntax noprefix
.globl add2
add2: push ebp
mov ebp, esp
mov eax, DWORD PTR [ebp+12]
add eax, 1
push eax
call g
add esp, 4 # undo the push
pop ebp
ret
#include <stdio.h>
int main(int argc, char *argv[]) {
int i;
for (i=0; i<10; i++)
printf("i is %d and add2(1,i) is %d\n",
i, add2(1,i));
return 0;
}
int g(int x) {
return x * x;
}
// Local Variables:
// compile-command: "cc -O add2.c add2.s \
// -mpreferred-stack-boundary=2; ./a.out"
// End:
We are the callee and first must set fp to the bottom of
OUR frame (it is currently the bottom of the
caller's frame).
We also must save the current value of fp so that when we
return to the caller, we can restore fp to the bottom of
the caller's frame.
That is, we want to move from the left diagram to the right one.
The first two assembler statements on the right do exactly this.
The register EBP holds the current fp (I believe B is for
base, the fp points to the base of the current stack).
The register ESP holds sp.
The purpose
of the program is to compute
(x+1)2 for x between 0 and 10.
The main program calls us with two arguments, the first is unused (I
wanted to illustrate the order the arguments appear on the stack)
the second is the value to be operated on.
We want to move the second argument to EAX for processing.
This will overwrite whatever the caller had in EAX, but recall that
it is one of the caller-saved registers (mentioned above) so we do
not have to save it.
How do we reference the second parameter?
It is in the caller's stack frame, the one below ours.
Since the stack grows towards zero, going backwards means increasing
the fp.
Why is it 12 to go back only 3, and what is the DWORD PTR
nonsense?
The 12 is easy: 3 words equals 12 bytes.
The DWORD PTR is because a pointer (in this case
ebp) can point to a byte, a 2-byte word, or a 4-byte
doubleword.
We think of 32-bit words, but the x86 family started out with 16-bit
machines and it shows.
Next we add 1.
Note that x86 is a 2-operand architecture, you can compute
x=xOPy or x=yOPx but not x=yOPz.
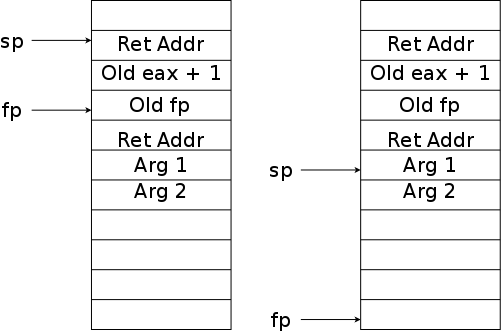
Now that we have x+1 we want to call a function to do the
squaring.
Thus, we are now the caller.
You might think that we need to save EAX since it is a caller-save
register, but the value it contains is the first argument of the new
callee so when we push that argument, we have saved EAX as well.
We then issue the call instruction.
The function g, like all functions, returns its result in
EAX.
As it happens that value is the result we are charged with returning
as well.
Thus we just leave it there and return to our caller.
But wait, we have messed up the pointers to the stack!
Hence, the end of our routine restores them before returning.
The first diagram on the right shows the stack just after we have
called g(), but before g() has executed.
When g executes ret, sp is lowered one
word.
We we execute add, sp is lowered again, returning
us to the right stack in the previous diagram.
The pop gives us the left stack in the previous diagram.
Finally, our ret restores the stack to 2nd on the right,
which is same as it was before main program called us.
Note that the values above sp are still there but the
space would be reused if main() called another routine.
5.3: Instruction Formats
5.3.1: Design Criteria for Instruction Formats
5.3.2: Expanding Opcodes
5.3.3: The Pentium II (x86) Instruction Formats
Very complicated as is clear from looking at Figure 5-14 and
reading the accompanying text.
This makes it difficult for the hardware designer, which is not our problem.
It also makes the assembly language somewhat irregular.
Specifically, it is not true that the 8 main registers
EAX, EBX, ECX, EDX, ESI, EDI, ESP, EDP can be used
interchangeably, certain instructions can use certain registers.
5.3.4: The UltraSPARC II Instruction Formats
5.3.5: The JVM Instruction Formats
T-5.4: Addressing
T-5.4.1: Addressing Modes
Most instructions have one or more operands, each of which is
specified by a corresponding field in the instruction.
It is the addressing mode that determines how the operand is
determined given the address field.
T-5.4.2: Immediate Addressing
In this, the simplest form, the address field is not an address at
all but is the operand.
In this case we say the instruction has an immediate operand,
because it can be determined immediately from the instruction
(without requiring and additional memory reference).
T-5.4.3: Direct Addressing
Almost as simple, and better fitting the name address field, is for
the address field to contain the address of the operand.
So if the address field is 12, the operand is the contents of
the 32-bit word (or 64-bit word, or 16-bit word, or 8-bit byte)
specified by location 12.
T-5.4.4: Register Addressing
In this mode the operand is the register specified by the address
field.
So if the address field is 12 the operand is the contents of the
register with address 12 (normally called simply register 12).
This mode is very common and very fast.
T-5.4.5: Register Indirect Addressing
Using the terminology of C (and other high-level languages).
This mode is just the de-reference operator applied to the previous
mode.
So if the address field is 12 the operand is determined by a two
step process: first register 12 is examined.
Say its value is 22888.
Then the operand is the contents of the word (or byte, etc)
specified by location 12.
T-5.4.6 Indexed Addressing
In this addressing mode, two values are used to determine the
address: one is a used to specify a register and the second is a
constant that is added to the contents of the register.
The resulting sum is use as a memory address, the contents of which
is the operand.
Why is this useful and why is it called indexed?
Consider
for (i=0; i<10; i++)
A[i] = 0;
and assume that the array A is global (so that its address is known
before the program begins execution).
What is the address referred to by A[i]?
It is the address of A[0] plus 4 times the value
of i.
The former is a constant (let's say it is 1280) and we use a
register for the latter so the assembler loop would have body
DWORD PTR mov [1280+EAX], 0 // X is the address of A[0], a known constant
add EAX, 4
Note that EAX is serving as the index i in the C
code.
Hence the name, indexed addressing.
T-5.4.7: Based-Indexed Addressing
If one register is good, two are better (or at least more general).
In this mode, the contents of two registers are added to a constant.
Consider again
for (i=0; i<10; i++)
A[i] = 0;
but this time assume the array A is on the stack.
Specifically assume A[0] is 1000 bytes below SP
the top of the stack.
Register ESP typically holds SP so the loop body
in assembler would be
mov DWORD PTR [ESP+EAX+1000], 0
add EAX, 4
T-5.4.8: Stack Addressing
Reverse Polish Notation
Evaluation of Reverse Polish Notation Formulas
T-5.4.9: Addressing Modes for Branch Instructions
T-5.4.10: Orthogonality of Opcodes and Addressing Modes
T-5.4.11: The Pentium 4 Addressing Modes
The x86 is quite irregular: not all addressing modes are available
for all instructions and not all registers can be used for all
addressing modes.
The machine has both 16-bit and 32-bit flavors of operations, we
are only studying the 32-bit versions.
The x86 is a two operand machine, but at most one operand can be a
memory location.
The x86 supports immediate, direct, register, register indirect,
indexed, and based-index.
Based-index uses an extra byte of instruction call the SIB (Scale,
Index, Base), which specifies not only both the base and index
registers, but a scale of 1, 2, 4, or 8 that is multiplied with the
index register, which permits that register to represent the number
of bytes, (16-bit) words, double words, or quad words the effective
address is displaced from the base.
I do not understand why Tanenbaum does not consider addresses using
SIB to be employing based-index mode.
T-5.4.12: The UltraSPARC Addressing Modes
T-5.4.13: The 8051 Addressing Modes
T-5.4.14: Discussion of Addressing Modes
T-5.6: Flow of Control
T-5.7: A Detailed Example: The Towers of Hanoi
T5.8: The IA-64 Architecture and the Itanium2
T5.6: Summary
Appendix TA: Binary Numbers
T-A.1: Finite Precision Numbers
In mathematics, integers have infinite precision.
That is, we uses as many digits as are needed, without limit.
Some software systems offer this as well (up to the memory limits
of the computer).
However, we will be looking at the native hardware support for
integers (we will not do floating point, which is a little more
complicated).
On most systems you can buy today, the normal integer is 32 bits or
64 bits.
That means you write integers using 32 bits (or 64 buts, but we will
concentrate on 32-bit systems).
If an integer requires more than 32 bits it cannot be expressed
using the native hardware representation of integers.
This possibility of a number not being expressible leads to
anomalies, such as overflow.
We will learn the representation shortly, but for the moment note
that the largest integer expressible in the native 32-bit system is
231-1=2,147,483,647.
Thus
(2,000,000,000-1,000,000,000)+1,000,000,000 ≠
(2,000,000,000+1,000,000,000)-1,000,000,000
Specifically, the first computation yields the mathematically
correct answer of 2,000,000,000; whereas, the second gives no answer
since an overflow occurs during the addition.
T-A.2: Radix Number Systems
We write our numbers in the radix-10 system.
That is the digits read from the right tell you how many 1s,
how many 10s, how many 100s, etc.
Note that 1=100, 10=101, 100=102,
etc.
(Some ancient civilizations used other radices—or radixes.)
Almost all computers use radix 2; that is what we shall use.
So the bits (sometimes called binary digits) from
right to left tell you how many 1s, 2s, 4s, 8s, etc., where
1=20, 2=21, 4=22, 8=23,
etc.
A.3: Conversion from one Radix to Another
It is very easy to convert from radix 2 to any radix
2n.
You simply group n of the bits together to form a single
digit in radix 2n.
Do this on the board for octal (radix 8=23) and
hexadecimal (radix 16=24).
Converting from Binary to Decimal
You can simply follow the definition.
For the binary number ABCDEFG (each letter is a bit),
the decimal equivalent is
A×26+B×25...+F×21+G×20 = A×128+B×64...+F×2+G
Less work is to evaluate the equivalent expression
G+2×(F+2×(E+2×(D+2×(C+2×(B+2×A)))))
from right to left
(start with A, double it and add B, double the sum and add C, ....
Converting from Decimal to Binary
Take the remainders obtained with successive divisions by two.
For example, take 103.
- Dividing 103 by two gives a quotient Q=51 and a remainder R=1.
This says the low order bit is 1.
- Next divide the quotient 51 by 2 and get Q=25 & R=1.
So the low order is now 11.
- Dividing 25 by 2 gives Q=12 & R=1; low order is 111.
- Dividing 12 by 2 gives Q=6 & R=0; low order is 0111.
- Dividing 6 by 2 gives Q=3 & R=0; low order is 00111.
- Dividing 3 by 2 gives Q=1 & R=1; low order is 10111.
- Dividing 1 by 2 gives Q=0 & R=1; low order is 10111.
Homework: 1, 2, 3
T-A.4: Negative Binary Numbers
There are several schemes for representing binary numbers; we will
study the one that is used on essentially all modern machines:
two's complement.
Although we are interested in 32-bit systems, let's use 4 bits in
this section since it will ease our task when we do arithmetic and
draw pictures.
There is basically no difference between n-bit and m-bit systems
providing n and m are least 3.
How Many Positive Values and How Many Negative Values
With 4 bits, we can express 16 numbers.
One of these bit pattern must be used for zero, leaving 15 for
positive and negative.
Thus we cannot achieve the ideal of using all 16 values, having
exactly one representation for each expressible value, and having
the same number of positive and negative values.
So we must give up one of these ideals.
Possibilities include
- Having two (or more) different representations for some
values.
- Having at least one bit pattern declared
illegal
.
- Having a different number of positive and negative values.
Possibility 1 has been done (in this very building!).
The CDC 6600, then the fastest computer in the world, used one's
complement arithmetic, which has two expressions for zero
(0000 and 1111).
Also one could use the bottom three bits to express 0-7 and declare
the top bit as the sign so both 0000 and 1000 would be zero.
I don't know of a machine that ever did possibility 2.
The third possibility dominates and that is what we will study.
A Conceptual Understanding of Twos Complement
This text (and many others) just tells you how to do it (take the
ordinary (bitwise) complement (called the one's complement) and then
add 1 to get the two's complement.
That sound too much like instructions to Merlin for my liking.
So I will try to explain why it is done.
Recall we have zero and 15 additional numbers to split among the
positive and negative values.
Seven will be positive and eight negative.
It will become clear later why we don't have 8 positive and seven
negative.
Good news.
The values from 0-7 are expressed as you would expect:
0000, 0001, 0010, 0011, 0100, 0101, 0110, 0111.
The high order bit gives the sign and the bottom n-1=4-1=3 bits
gives the magnitude.
Bad news.
The value -3 is not just the value for three with the sign bit 1.
Let's begin.
Note that the number 16 in binary is 10000, it is the first number
that cannot be expressed in 4 bits.
If we chop off the high bit (normally called HOB, high-order
bit), 16 becomes 0.
Said mathematically 16 mod 16 is 0.
Now what about -3?
The definition of -3 is that it is the (unique) number that, when
added to 3, gives 0.
Instead of demanding to get 0 when added, we loosen the requirement
to say that we want a number that, when added to 3, gives 0 mod 16.
There are lots of them: 13+3=16, which is 0 mod 16;
29+3=32, which also is 0 mod 16.
But there is only one number in the range 0-15 that has this
property, and those are precisely the numbers expressible in 4 bits.
Mathematically we are simply taking -3 mod 16.
So, for us -3 is the 4-bit representation of 13, which is 1101.
If we simply add and throw away the 5th bit we see that 13+3 is
indeed 0: 1101+0011=10000, which becomes 0000 when we throw away bit
5.
Recall that we define -n to be the number, which when added to n
gives 16, i.e. we just express -n as (-n) mod 16.
This is all for n between 1 and 7.
The properties of mod permit us to prove the normal laws of inverses.
For example, the inverse of n+m is
-(n+m) mod 16 = (-n)+(-m) mod 16 = [(-n) mod 16] + [(-m) mod 16]
which is precisely the inverse of n plus the inverse of m.
OK, but how do you calculate inverses on the computer.
For our 4-bit system, do we calculate the inverse of 3 by
evaluating -3 mod 16?
With a 32-bit system, do we calculate the inverse of 1,000,000 by
evaluating -1,000,000 mod 232?
There is indeed an easier way.
Recall that to find the inverse of 3 we needed to find the number
with the property that when added to 3 we get 16.
Written in 4-bit binary we want the number that when added to 0011
gives us 10000 (I know that is 5-bits).
Let's ask a different question.
What is the number that when added to 0011, gives 1111.
That is easy, look at 0011 and take the complement, 1100.
Then between the original and the complement each bit position has
exactly one 1 so the sum is clearly 1111.
(This number 1100 is called the one's complement).
Since we really wanted to get 10000 not just 1111, we need to add
one.
This gives 1101, which is indeed the two's complement of 0011.
So the rule is:
Take the bitwise complement and add 1, just as all the text books
say.
So for 4-bit numbers using two's complement arithmetic, -0011 is
1101.
Said more simply -3 is 1101 in 4-bit 2's complement arithmetic.
Negating Negative Numbers and the Lack of Ideal Behavior
It is not too hard to see that this same procedure works when the
original number is negative.
Lets try -(-3).
We already know -3 is 1101.
Complementing gives 0010 and adding 1 gives 0011.
Success.
Addition works too.
Compute -2=-0010=1101+1=1110; (-2)+(-3)=1101+1110=11011 toss the HOB
and the answer is 1011.
Is this really -5?
Does 1011+0100 give 16?
Yes!
Is -(1011) equal to 5?
Take the complement and add 1: 0100+1=0101=5.
Now the sad news.
(-4)+(-4)=1100+1100=11000 toss the HOB and get 1000, which actually
is -8 but the complement is 0111+1=1000 which is not 8.
Remember we can't have the same number of positives as negatives.
So the range for 4-bit two's complement is -8,-7,...0,...6,7.
T-A.5: Binary Arithmetic
Tanenbaum does both one's complement and two's complement
arithmetic.
We will just do the latter.
As we indicated above you simply add the two's complement numbers
with no thought of signs or compliments.
If you add two n-bit numbers you might get an (n+1)-bit number,
i.e., you might get a carry-out of the high order bit.
But the rule is simple, toss it!
Subtraction
The rule is the same as what you learned in elementary school,
a-b=a+(-b).
That is you invert (take the two's complement) the b and
add.
For example 5-3 is (0101)-(0011)=(0101)+(1101)=10010 toss the HOB
and get 0010 which is 2.
Homework: 7.
Overflow
Unfortunately, although the above does describe (part of)
the hardware, it doesn't always give the correct answer.
As a simple example, with our 4-bit system we can express -8...7,
but if you add 5+6 you should get 11.
We cannot possibly get 11 since we can't express
11.
Similarly if you add (-5)+(-6), you should get -11, which again we
cannot even express.
When the result falls outside the expressible range,
an overflow has occurred.
When you add numbers of opposite sign overflow is impossible (the
result is between the two original numbers).
As we have seen, subtracting numbers of the same sign is the same
as adding numbers of opposite sign so again overflow is impossible.
When you add numbers of the same sign (or subtract numbers of the
opposite sign) overflow is possible.
The question is, When does it occur?
.
The answer is simple to state but not so simple to explain (you
need to analyze several cases): An overflow occurs if and only if
the carry into the HOB does not equal the carry out from the HOB.
Homework: 9.
