
Start Lecture #6
A race condition occurs when two (or more) processes are about to perform some action. Depending on the exact timing, one or other goes first. If one of the processes goes first, everything works correctly, but if another one goes first, an error, possibly fatal, occurs.
Imagine two processes both accessing x, which is initially 10.
A1: LOAD r1,x B1: LOAD r2,x A2: ADD r1,1 B2: SUB r2,1 A3: STORE r1,x B3: STORE r2,x
We must prevent interleaving sections of code that need to be atomic with respect to each other. That is, the conflicting sections need mutual exclusion. If process A is executing its critical section, it excludes process B from executing its critical section. Conversely if process B is executing is critical section, it excludes process A from executing its critical section.
Requirements for a critical section implementation.
We will study only solutions in this class. Note that higher level solutions, e.g., having one process block when it cannot enter its critical are implemented using busy waiting algorithms.
The operating system can choose not to preempt itself. That is, we could choose not to preempt system processes (if the OS is client server) or processes running in system mode (if the OS is self service). Forbidding preemption for system processes would prevent the problem above where x<--x+1 not being atomic crashed the printer spooler if the spooler is part of the OS.
The way to prevent preemption of kernel-mode code is to disable
interrupts.
Indeed, disabling (i.e., temporarily preventing) interrupts
is often done for exactly this reason.
This is not, however, sufficient for all cases.
Initially P1wants=P2wants=false
Code for P1 Code for P2
Loop forever { Loop forever {
P1wants <-- true ENTRY P2wants <-- true
while (P2wants) {} ENTRY while (P1wants) {}
critical-section critical-section
P1wants <-- false EXIT P2wants <-- false
non-critical-section } non-critical-section }
Explain why this works.
But it is wrong!
Why?
Let's try again. The trouble was that setting want before the loop permitted us to get stuck. We had them in the wrong order!
Initially P1wants=P2wants=false
Code for P1 Code for P2
Loop forever { Loop forever {
while (P2wants) {} ENTRY while (P1wants) {}
P1wants <-- true ENTRY P2wants <-- true
critical-section critical-section
P1wants <-- false EXIT P2wants <-- false
non-critical-section } non-critical-section }
Explain why this works.
But it is wrong again!
Why?
Now let's try being polite and really take turns. None of this wanting stuff.
Initially turn=1
Code for P1 Code for P2
Loop forever { Loop forever {
while (turn = 2) {} while (turn = 1) {}
critical-section critical-section
turn <-- 2 turn <-- 1
non-critical-section } non-critical-section }
This one forces alternation, so is not general enough. Specifically, it does not satisfy condition three, which requires that no process in its non-critical section can stop another process from entering its critical section. With alternation, if one process is in its non-critical section (NCS) then the other can enter the CS once but not again.
The first example violated rule 4 (the whole system blocked). The second example violated rule 1 (both in the critical section. The third example violated rule 3 (one process in the NCS stopped another from entering its CS).
In fact, it took years (way back when) to find a correct solution.
Many earlier solutions
were found and several were published, but
all were wrong.
The first correct solution was found by a mathematician named Dekker,
who combined the ideas of turn and wants.
The basic idea is that you take turns when there is contention, but
when there is no contention, the requesting process can enter.
It is very clever, but I am skipping it (I cover it when I teach
distributed operating systems in V22.0480 or G22.2251).
Subsequently, algorithms with better fairness properties were found
(e.g., no task has to wait for another task to enter the CS twice).
What follows is Peterson's solution, which also combines wants and turn to force alternation only when there is contention. When Peterson's algorithm was published, it was a surprise to see such a simple solution. In fact Peterson gave a solution for any number of processes. A proof that the algorithm satisfies our properties (including a strong fairness condition) for any number of processes can be found in Operating Systems Review Jan 1990, pp. 18-22.
Initially P1wants=P2wants=false and turn=1
Code for P1 Code for P2
Loop forever { Loop forever {
P1wants <-- true P2wants <-- true
turn <-- 2 turn <-- 1
while (P2wants and turn=2) {} while (P1wants and turn=1) {}
critical-section critical-section
P1wants <-- false P2wants <-- false
non-critical-section } non-critical-section }
Tanenbaum calls this instruction
test and set lock TSL
.
I call it test and set (TAS)
and define
TAS(b), where b is a binary variable,
to ATOMICALLY set b←true and return the OLD value of b.
Of course it would be silly to return the new value of b since we know the new value is true.
The word atomically means that the two actions performed by TAS(x), testing (i.e., returning the old value of x) and setting (i.e., assigning true to x) are inseparable. Specifically it is not possible for two concurrent TAS(x) operations to both return false (unless there is also another concurrent statement that sets x to false).
With TAS available, implementing a critical section for any number of processes is trivial.
loop forever {
while (TAS(s)) {} ENTRY
CS
s<--false EXIT
NCS }
Remark: Tanenbaum presents both busy waiting (as above) and blocking (process switching) solutions. We present only do busy waiting solutions, which are easier and used in the blocking solutions. Sleep and Wakeup are the simplest blocking primitives. Sleep voluntarily blocks the process and wakeup unblocks a sleeping process. However, it is far from clear how sleep and wakeup are implemented. Indeed, deep inside, they typically use TAS or some similar primitive. We will not cover these solutions.
Homework: Explain the difference between busy waiting and blocking process synchronization.
Remark: Tannenbaum use the term semaphore only for blocking solutions. I will use the term for our busy waiting solutions (as well as for blocking solutions). Others call our solutions spin locks.
The entry code is often called P and the exit code V. Thus the critical section problem is to write P and V so that
loop forever
P
critical-section
V
non-critical-section
satisfies
Note that I use indenting carefully and hence do not need (and sometimes omit) the braces {} used in languages like C or java.
A binary semaphore abstracts the TAS solution we gave for the critical section problem.
openand
closed.
while (S=closed) {}
S<--closed -- This is NOT the body of the while
where finding S=open and setting S<--closed is atomic
The above code is not real, i.e., it is not an implementation of P. It requires a sequence of two instructions to be atomic and that is, after all, what we are trying to implement in the first place. The above code is, instead, a definition of the effect P is to have.
To repeat: for any number of processes, the critical section problem can be solved by
loop forever
P(S)
CS
V(S)
NCS
The only solution we have seen for an arbitrary number of processes is the one just above with P(S) implemented via test and set.
Remark: Peterson's solution requires each process to know its process number; the TAS soluton does not. Moreover the definition of P and V does not permit use of the process number. Thus, strictly speaking Peterson did not provide an implementation of P and V. He did solve the critical section problem.
To solve other coordination problems we want to extend binary semaphores.
Both of the shortcomings can be overcome by not restricting ourselves to a binary variable, but instead define a generalized or counting semaphore.
while (S=0) {}
S--
where finding S>0 and decrementing S is atomic
Counting semaphores can solve what I call the semi-critical-section problem, where you premit up to k processes in the section. When k=1 we have the original critical-section problem.
initially S=k
loop forever
P(S)
SCS -- semi-critical-section
V(S)
NCS
Note that my definition of semaphore is different from Tanenbaum's so it is not surprising that my solution is also different from his.
Unlike the previous problems of mutual exclusion, the producer-consumer has two classes of processes
What happens if the producer encounters a full buffer?
Answer: It waits for the buffer to become non-full.
What if the consumer encounters an empty buffer?
Answer: It waits for the buffer to become non-empty.
The producer-consumer problem is also called the bounded buffer problem, which is another example of active entities being replaced by a data structure when viewed at a lower level (Finkel's level principle).
Initially e=k, f=0 (counting semaphores); b=open (binary semaphore)
Producer Consumer
loop forever loop forever
produce-item P(f)
P(e) P(b); take item from buf; V(b)
P(b); add item to buf; V(b) V(e)
V(f) consume-item
bounded alternation. If k=1 it gives strict alternation.
Remark: Whereas we use the term semaphore to mean binary semaphore and explicitly say generalized or counting semaphore for the positive integer version, Tanenbaum uses semaphore for the positive integer solution and mutex for the binary version. Also, as indicated above, for Tanenbaum semaphore/mutex implies a blocking primitive; whereas I use binary/counting semaphore for both busy-waiting and blocking implementations. Finally, remember that in this course our only solutions are busy-waiting.
| Busy wait | block/switch | |
|---|---|---|
| critical | (binary) semaphore | (binary) semaphore |
| semi-critical | counting semaphore | counting semaphore |
| Busy wait | block/switch | |
|---|---|---|
| critical | enter/leave region | mutex |
| semi-critical | no name | semaphore |
You can find some information on barriers in my lecture notes for a follow-on course (see in particular lecture number 16).
We did this previously.
A classical problem from Dijkstra
What algorithm do you use for access to the shared resource (the forks)?
The purpose of mentioning the Dining Philosophers problem without giving the solution is to give a feel of what coordination problems are like. The book gives others as well. The solutions would be covered in a sequel course. If you are interested look, for example here.
Homework: 45 and 46 (these have short answers but are not easy). Note that the second problem refers to fig. 2-20, which is incorrect. It should be fig 2-46.
As in the producer-consumer problem we have two classes of processes.
The problem is to
Variants
Solutions to the readers-writers problem are quite useful in
multiprocessor operating systems and database systems.
The easy way out
is to treat all processes as writers in
which case the problem reduces to mutual exclusion (P and V).
The disadvantage of the easy way out is that you give up reader
concurrency.
Again for more information see the web page referenced above.
Critical Sections have a form of atomicity, in some ways similar to transactions. But there is a key difference: With critical sections you have certain blocks of code, say A, B, and C, that are mutually exclusive (i.e., are atomic with respect to each other) and other blocks, say D and E, that are mutually exclusive; but blocks from different critical sections, say A and D, are not mutually exclusive.
The day after giving this lecture in 2006-07-spring, I found a
modern reference to the same question.
The quote below is from
Subtleties of Transactional Memory Atomicity Semantics
by Blundell, Lewis, and Martin in
Computer Architecture Letters
(volume 5, number 2, July-Dec. 2006, pp. 65-66).
As mentioned above, busy-waiting (binary) semaphores are often
called locks (or spin locks).
... conversion (of a critical section to a transaction) broadens the scope of atomicity, thus changing the program's semantics: a critical section that was previously atomic only with respect to other critical sections guarded by the same lock is now atomic with respect to all other critical sections.
We began with a subtle bug (wrong answer for x++ and x--) and used it to motivate the Critical Section Problem for which we provided a (software) solution.
We then defined (binary) Semaphores and showed that a Semaphore easily solves the critical section problem and doesn't require knowledge of how many processes are competing for the critical section. We gave an implementation using Test-and-Set.
We then gave an operational definition of Semaphore (which is not an implementation) and morphed this definition to obtain a Counting (or Generalized) Semaphore, for which we gave NO implementation. I asserted that a counting semaphore can be implemented using 2 binary semaphores and gave a reference.
We defined the Producer-Consumer (or Bounded Buffer) Problem and showed that it can be solved using counting semaphores (and binary semaphores, which are a special case).
Finally we briefly discussed some classical problems, but did not give (full) solutions.
Skipped.
Skipped, but you should read.
Remark: Deadlocks are closely related to process
management so belong
here, right after chapter 2.
It was here in 2e.
A goal of 3e is to make sure that the basic material gets covered in
one semester.
But I know we will do the first 6 chapters so there is no need for
us to postpone the study of deadlock.
A deadlock occurs when every member of a set of processes is waiting for an event that can only be caused by a member of the set.
Often the event waited for is the release of a resource.
In the automotive world deadlocks are called gridlocks.
For a computer science example consider two processes A and B that each want to print a file currently on a CD-ROM Drive.
Bingo: deadlock!
A resource is an object granted to a process.
Resources come in two types
The interesting issues arise with non-preemptable resources so those are the ones we study.
The life history of a resource is a sequence of
Processes request the resource, use the resource, and release the resource. The allocate decisions are made by the system and we will study policies used to make these decisions.
A simple example of the trouble you can get into.
Recall from the semaphore/critical-section treatment last chapter, that it is easy to cause trouble if a process dies or stays forever inside its critical section. We assume processes do not do this. Similarly, we assume that no process retains a resource forever. It may obtain the resource an unbounded number of times (i.e. it can have a loop forever with a resource request inside), but each time it gets the resource, it must release it eventually.
Definition: A deadlock occurs when a every member of a set of processes is waiting for an event that can only be caused by a member of the set.
Often the event waited for is the release of a resource.
The following four conditions (Coffman; Havender) are necessary but not sufficient for deadlock. Repeat: They are not sufficient.
One can say
If you want a deadlock, you must have these four conditions.
.
But of course you don't actually want a deadlock, so you would more
likely say If you want to prevent deadlock, you need only violate
one or more of these four conditions.
.
The first three are static characteristics of the system and resources. That is, for a given system with a fixed set of resources, the first three conditions are either always true or always false: They don't change with time. The truth or falsehood of the last condition does indeed change with time as the resources are requested/allocated/released.
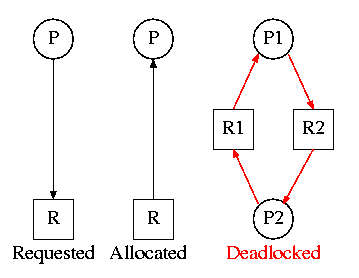
On the right are several examples of a Resource Allocation Graph, also called a Reusable Resource Graph.
Homework: 5.
Consider two concurrent processes P1 and P2 whose programs are.
P1 P2
request R1 request R2
request R2 request R1
release R2 release R1
release R1 release R2
On the board draw the resource allocation graph for various possible executions of the processes, indicating when deadlock occurs and when deadlock is no longer avoidable.
There are four strategies used for dealing with deadlocks.
The put your head in the sand approach
.