Operating Systems
Start Lecture #7
Remark: Lab 3 is available
6.7 Other Issues
6.7.1 Two-phase locking
This is covered (MUCH better) in a database text.
We will skip it.
6.7.2 Communication Deadlocks
We have mostly considered actually hardware resources such as
printers, but have also considered more abstract resources such as
semaphores.
There are other possibilities.
For example a server often waits for a client to make a request.
But if the request msg is lost the server is still waiting for the
client and the client is waiting for the server to respond to the
(lost) last request.
Each will wait for the other forever, a deadlock.
A solution
to this communication deadlock would be to use a
timeout so that the client eventually determines that the msg was
lost and sends another.
But it is not nearly that simple:
The msg might have been greatly delayed and now the server will get
two requests, which could be bad, and is likely to send two replies,
which also might be bad.
This gives rise to the serious subject of communication
protocols.
6.7.3 Livelock
Instead of blocking when a resource is not available, a process may
(wait and then) try again to obtain it.
Now assume process A has the printer, and B the CD-ROM, and each
process wants the other resource as well.
A will repeatedly request the CD-ROM and B will repeatedly request the
printer.
Neither can ever succeed since the other process holds the desired
resource.
Since no process is blocked, this is not technically deadlock, but a
related concept called livelock.
6.7.4 Starvation
As usual FCFS is a good cure.
Often this is done by priority aging and picking the highest
priority process to get the resource.
Also can periodically stop accepting new processes until all old
ones get their resources.
6.8 Research on Deadlocks
6.9 Summary
Read.
Chapter 3 Memory Management
Also called storage management or
space management.
The memory manager must deal with the
storage hierarchy present in modern machines.
- The hierarchy consists of registers (the highest level),
cache, central memory, disk, tape (backup).
- Various (hardware and software) memory managers moves data
from level to level of the hierarchy.
- We are concerned with the central memory ↔ disk boundary.
- The same questions are asked about the cache ↔ central
memory boundary when one studies computer architecture.
Surprisingly, the terminology is almost completely different!
- When should we move data up to a higher level?
- Fetch on demand (e.g. demand paging, which is dominant now
and which we shall study in detail).
- Prefetch
- Read-ahead for file I/O.
- Large cache lines and pages.
- Extreme example.
Entire job present whenever running.
- Unless the top level has sufficient memory for the entire
system, we must also decide when to move data down to a lower
level.
This is normally called evicting the data (from the higher
level).
- In OS classes we concentrate on the central-memory/disk layers
and transitions.
- In architecture we concentrate on the cache/central-memory
layers and transitions (and use different terminology).
We will see in the next few weeks that there are three independent
decision:
- Should we have segmentation.
- Should we have paging.
- Should we employ fetch on demand.
Memory management implements address translation.
- Convert virtual addresses to physical addresses
- Also called logical to real address translation.
- A virtual address is the address expressed in
the program.
- A physical address is the address understood
by the computer hardware.
- The translation from virtual to physical addresses is performed by
the Memory Management Unit or (MMU).
- Another example of address translation is the conversion of
relative addresses to absolute addresses
by the linker.
- The translation might be trivial (e.g., the identity) but not
in a modern general purpose OS.
- The translation might be difficult (i.e., slow).
- Often includes addition/shifts/mask—not too bad.
- Often includes memory references.
- VERY serious.
- Solution is to cache translations in a
Translation Lookaside Buffer (TLB).
Sometimes called a translation buffer (TB).
Homework:
What is the difference between a physical address and a virtual address?
When is address translation performed?
- At compile time
- Compiler generates physical addresses.
- Requires knowledge of where the compilation unit will be loaded.
- No linker.
- Loader is trivial.
- Primitive.
- Rarely used (MSDOS .COM files).
- At link-edit time (the
linker lab
)
- Compiler
- Generates relative (a.k.a. relocatable) addresses for each
compilation unit.
- References external addresses.
- Linkage editor
- Converts relocatable addresses to absolute.
- Resolves external references.
- Must also converts virtual to physical addresses by
knowing where the linked program will be loaded.
Linker lab
does
this, but it is trivial since we
assume the linked program will be loaded at 0.
- Loader is still trivial.
- Hardware requirements are small.
- A program can be loaded only where specified and
cannot move once loaded.
- Not used much any more.
- At load time
- Similar to at link-edit time, but do not fix
the starting address.
- Program can be loaded anywhere.
- Program can move but cannot be split.
- Need modest hardware: base/limit registers.
- Loader sets the base/limit registers.
- No longer common.
- At execution time
- Addresses translated dynamically during execution.
- Hardware needed to perform the virtual to physical address
translation quickly.
- Currently dominates.
- Much more information later.
Extensions
- Dynamic Loading
- When executing a call, check if the module is loaded.
- If it is not loaded, have a linking loader load it and
update the tables to indicate that it now is loaded and where
it is.
- This procedure slows down all calls to the routine (not just
the first one that must load the module) unless you rewrite
code dynamically.
- Not used much.
- Dynamic Linking.
- This is covered later.
- Commonly used.
Note: I will place ** before each memory management
scheme.
3.1 No Memory Management
The entire process remains in memory from start to finish and does
not move.
The sum of the memory requirements of all jobs in the system cannot
exceed the size of physical memory.
Monoprogramming
The good old days
when everything was easy.
- No address translation done by the OS (i.e., address translation is
not performed dynamically during execution).
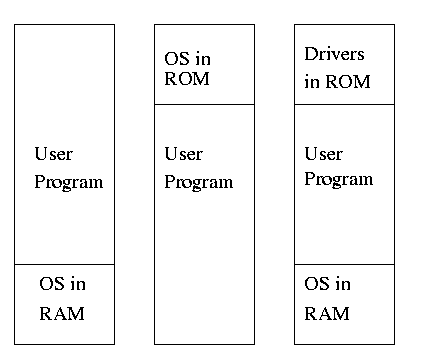
- Either reload the OS for each job (or don't have an OS, which is almost
the same), or protect the OS from the job.
- One way to protect (part of) the OS is to have it in ROM.
- Of course, must have the OS (read-write) data in RAM.
- Can have a separate OS address space that is accessible
only in supervisor mode.
- Might put just some drivers in ROM (BIOS).
- The user employs overlays if the memory needed
by a job exceeds the size of physical memory.
- Programmer breaks program into pieces.
- A
root
piece is always memory resident.
- The root contains calls to load and unload various pieces.
- Programmer's responsibility to ensure that a piece is already
loaded when it is called.
- No longer used, but we couldn't have gotten to the moon in the
60s without it (I think).
- Overlays have been replaced by dynamic address translation and
other features (e.g., demand paging) that have the system support
logical address sizes greater than physical address sizes.
- Fred Brooks (leader of IBM's OS/360 project and author of
The
mythical man month
) remarked that the OS/360 linkage editor was
terrific, especially in its support for overlays, but by the time
it came out, overlays were no longer used.
Running Multiple Programs Without a Memory Abstraction
This can be done via swapping if you have only one program loaded
at a time.
A more general version of swapping is discussed below.
One can also support a limited form of multiprogramming, similar to
MFT (which is described next).
In this limited version, the loader relocates all relative
addresses, thus permitting multiple processes to coexist in physical
memory the way your linker permitted multiple modules in a single
process to coexist.
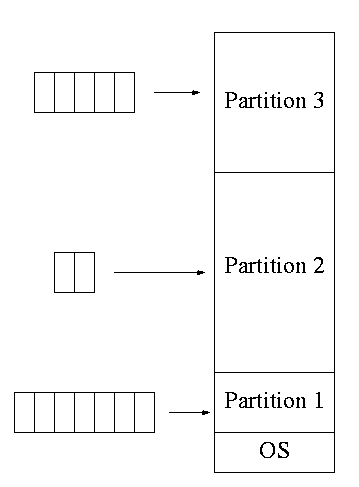
**Multiprogramming with Fixed Partitions
Two goals of multiprogramming are to improve CPU utilization, by
overlapping CPU and I/O, and to permit short jobs to finish quickly.
- This scheme was used by IBM for system 360 OS/MFT
(multiprogramming with a fixed number of tasks).
- An alternative would have a single input
list
instead
of one queue for each partition.
- With this alternative, if there are no big jobs, one can
use the big partition for little jobs.
- The single list is not a queue since would want to remove
the first job for each partition.
- I don't think IBM did this.
- You can think of the input lists(s) as the ready list(s)
with a scheduling policy of FCFS in each partition.
- Each partition was monoprogrammed, the
multiprogramming occurred
across partitions.
- The partition boundaries are not movable
(must reboot to move a job).
- So the partitions are of fixed size.
- MFT can have large internal fragmentation,
i.e., wasted space inside a region of memory assigned
to a process.
- Each process has a single
segment
(i.e., the virtual
address space is contiguous).
We will discuss segments later.
- The physical address space is also contiguous (i.e., the program
is stored as one piece).
- No sharing of memory between process.
- No dynamic address translation.
- OS/MFT is an example of address translation during load time.
- The system must
establish addressability
.
- That is, the system must set a register to the location at
which the process was loaded (the bottom of the partition).
Actually this is done with a user-mode instruction so could
be called execution time, but it is only done once at the
very beginning.
- This register (often called a base register by ibm) is
part of the programmer visible register set.
Soon we will meet base/limit registers, which, although
related to the IBM base register above, have the important
difference of being outside the programmer's control or
view.
- Also called relocation.
- In addition, since the linker/assembler
allow the use of addresses as data, the loader itself
relocates these at load time.
- Storage keys are adequate for protection (the IBM method).
- An alternative protection method is base/limit registers,
which are discussed below.
- An advantage of the base/limit scheme is that it is easier to
move a job.
- But MFT didn't move jobs so this disadvantage of storage keys
is moot.
3.2 A Memory Abstraction: Address Spaces
3.2.1 The Notion of an Address Space
Just as the process concept creates a kind of abstract CPU to run
programs, the address space creates a kind of abstract memory for
programs to live in.
This does for processes, what you so kindly did for modules in the
linker lab: permit each to believe it has its own memory starting at
address zero.
Base and Limit Registers
Base and limit registers are additional hardware, invisible to the
programmer, that supports multiprogramming by automatically adding
the base address (i.e., the value in the base register) to every
relative address when that address is accessed at run time.
In addition the relative address is compared against the value in
the limit register and if larger, the processes aborted since it has
exceeded its memory bound.
Compare this to your error checking in the linker lab.
The base and limit register are set by the OS when the job starts.
3.2.2 Swapping
Moving an entire processes between disk and memory is called
swapping.
Multiprogramming with Variable Partitions
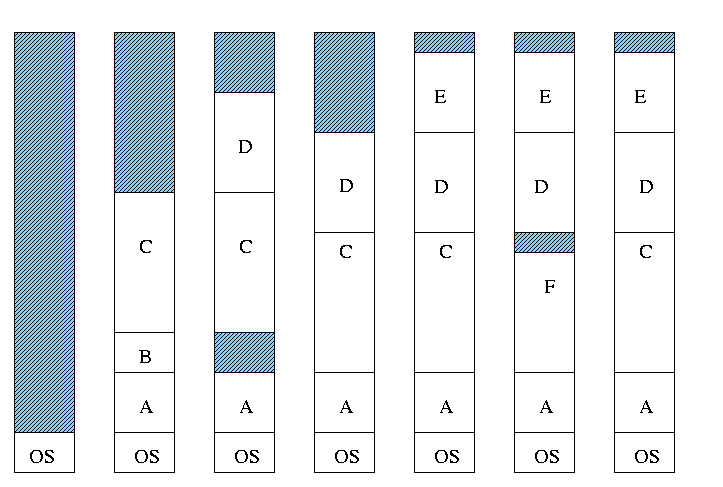
Both the number and size of the
partitions change with time.
Homework: A swapping system eliminates holes by
compaction.
Assume a random distribution of holes and data segments, assume the
data segments are much bigger than the holes, and assume a time to
read or write a 32-bit memory word of 10ns.
About how long does it take to compact 128 MB?
For simplicity, assume that word 0 is part of a hole and the highest
word in memory conatains valid data.
3.2.3 Managing Free Memory
MVT Introduces the Placement Question
That is, which hole (partition) should one choose?
- There are various algorithms for choosing a hole including best
fit, worst fit, first fit, circular first fit, quick fit, and
Buddy.
- Best fit doesn't waste big holes, but does leave slivers and
is expensive to run.
- Worst fit avoids slivers, but eliminates all big holes so
a big job will require compaction.
Even more expensive than best fit (best fit stops if it
finds a perfect fit).
- Quick fit keeps lists of some common sizes (but has other
problems, see Tanenbaum).
- Buddy system
- Round request to next highest power of two (causes
internal fragmentation).
- Look in list of blocks this size (as with quick fit).
- If list empty, go higher and split into buddies.
- When returning coalesce with buddy.
- Do splitting and coalescing recursively, i.e. keep
coalescing until can't and keep splitting until successful.
- See Tanenbaum (look in the index) or an algorithms
book for more details.
- A current favorite is circular first fit, also known as next fit.
- Use the first hole that is big enough (first fit) but start
looking where you left off last time.
- Doesn't waste time constantly trying to use small holes that
have failed before, but does tend to use many of the big holes,
which can be a problem.
- Buddy comes with its own implementation.
How about the others?
Homework:
Consider a swapping system in which memory consists of the following
hole sizes in memory order: 10K, 4K, 20K, 18K 7K, 9K, 12K, and 15K.
Which hole is taken for successive segment requests of
- 12K
- 10K
- 9K
for first fit?
Now repeat the question for best fit, worst fit, and next fit.
Memory Management with Bitmaps
Divide memory into blocks and associate a bit with each block, used
to indicate if the corresponding block is free or allocated.
To find a chunk of size N blocks need to find N consecutive
bits indicating a free block.
The only design question is how much memory does one bit represent.
- Big: Serious internal fragmentation.
- Small: Many bits to store and process.
Memory Management with Linked Lists
Instead of a bit map, use a linked list of nodes where each node
corresponds to a region of memory either allocated to a process or
still available (a hole).
- Each item on list gives the length and starting location of
the corresponding region of memory and says whether it is a hole
or Process.
- The items on the list are not taken from the memory to be
used by processes.
- The list is kept in order of starting address.
- Merge adjacent holes when freeing memory.
- Use either a singly or doubly linked list.
Memory Management using Boundary Tags
See Knuth, The Art of Computer Programming vol 1.
- Use the same memory for list items as for processes.
- Don't need an entry in linked list for the blocks in use, just
the avail blocks are linked.
- The avail blocks themselves are linked, not a node that points to
an avail block.
- When a block is returned, we can look at the boundary tag of the
adjacent blocks and see if they are avail.
If so they must be merged with the returned block.
- For the blocks currently in use, just need a hole/process bit at
each end and the length.
Keep this in the block itself.
- We do not need to traverse the list when returning a block can use
boundary tags to find predecessor.
MVT also introduces the Replacement Question
That is, which victim should we swap out?
This is an example of the suspend arc mentioned in process
scheduling.
We will study this question more when we discuss
demand paging in which case
we swap out only part of a process.
Considerations in choosing a victim
- Cannot replace a job that is pinned,
i.e. whose memory is tied down. For example, if Direct Memory
Access (DMA) I/O is scheduled for this process, the job is pinned
until the DMA is complete.
- Victim selection is a medium term scheduling decision
- A job that has been in a wait state for a long time is a good
candidate.
- Often choose as a victim a job that has been in memory for a long
time.
- Another question is how long should it stay swapped out.
- For demand paging, where swaping out a page is not as drastic
as swapping out a job, choosing the victim is an important
memory management decision and we shall study several policies.
NOTEs:
- So far the schemes presented so far have had two properties:
- Each job is stored contiguously in memory.
That is, the job is contiguous in physical addresses.
- Each job cannot use more memory than exists in the system.
That is, the virtual addresses space cannot exceed the
physical address space.
- Tanenbaum now attacks the second item.
I wish to do both and start with the first.
- Tanenbaum (and most of the world) uses the term
paging
to mean what I call demand paging.
This is unfortunate as it mixes together two concepts.
- Paging (dicing the address space) to solve the placement
problem and essentially eliminate external fragmentation.
- Demand fetching, to permit the total memory requirements of
all loaded jobs to exceed the size of physical memory.
- Most of the world uses the term virtual memory as a synonym for
demand paging.
Again I consider this unfortunate.
- Demand paging is a fine term and is quite descriptive.
- Virtual memory
should
be used in contrast with
physical memory to describe any virtual to physical address
translation.
** (non-demand) Paging
Simplest scheme to remove the requirement of contiguous physical
memory.
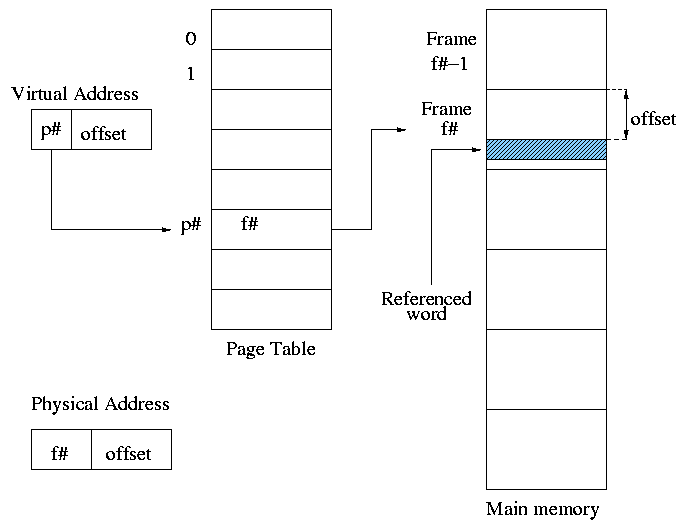
- Chop the program into fixed size pieces called
pages, which are invisible to the user.
Tanenbaum sometimes calls pages
virtual pages.
- Chop the real memory into fixed size pieces called
page frames or
simply frames.
- The size of a page (the page size) = size of a frame (the frame
size).
- Sprinkle the pages into the frames.
- Keep a table (called the page table) having
an entry for each page.
The page table entry or PTE for page p contains
the number of the frame f that contains page p.