Start Lecture #4
The transfer of control between user processes and the operating system kernel can be quite complicated, especially in the case of blocking system calls, hardware interrupts, and page faults. Before tackling these issues later, we begin with the familiar example of a procedure call within a user-mode process.
An important OS objective is that, even in the more complicated cases of page faults and blocking system calls requiring device interrupts, simple procedure call semantics are observed from a user process viewpoint. The complexity is hidden inside the kernel itself, yet another example of the operating system providing a more abstract, i.e., simpler, virtual machine to the user processes.
More details will be added when we study memory management (and know officially about page faults) and more again when we study I/O (and know officially about device interrupts).
A number of the points below are far from standardized.
Such items as where to place parameters, which routine saves the
registers, exact semantics of trap, etc, vary as one changes
language/compiler/OS.
Indeed some of these are referred to as calling conventions
,
i.e. their implementation is a matter of convention rather than
logical requirement.
The presentation below is, we hope, reasonable, but must be viewed as
a generic description of what could happen instead of an exact
description of what does happen with, say, C compiled by the Microsoft
compiler running on Windows XP.
Procedure f calls g(a,b,c) in process P. An example is above where a user program calls read(fd,buffer,nbytes).
stack-likestructure of control transfer: we can be sure that control will return to this f when this call to g exits. The above statement holds even if, via recursion, g calls f. (We are ignoring language features such as
throwingand
catchingexceptions, and the use of unstructured assembly coding. In the latter case all bets are off.)
We mean one procedure running in kernel mode calling another procedure, which will also be run in kernel mode. Later, we will discuss switching from user to kernel mode and back.
There is not much difference between the actions taken during a kernel-mode procedure call and during a user-mode procedure call. The procedures executing in kernel-mode are permitted to issue privileged instructions, but the instructions used for transferring control are all unprivileged so there is no change in that respect.
One difference is that often a different stack is used in kernel mode, but that simply means that the stack pointer must be set to the kernel stack when switching from user to kernel mode. But we are not switching modes in this section; the stack pointer already points to the kernel stack. Often there are two stack pointers one for kernel mode and one for user mode.
The trap instruction, like a procedure call, is a synchronous transfer of control: We can see where, and hence when, it is executed. In this respect, there are no surprises. Although not surprising, the trap instruction does have an unusual effect, processor execution is switched from user-mode to kernel-mode. That is, the trap instruction normally itself is executed in user-mode (it is naturally an UNprivileged instruction), but the next instruction executed (which is NOT the instruction written after the trap) is executed in kernel-mode.
Process P, running in unprivileged (user) mode, executes a trap.
The code being executed is written in assembler since there are no
high level languages that generate a trap instruction.
There is no need to name the function that is executing.
Compare the following example to the explanation of f calls g
given above.
nameof the code-sequence to which the processor will jump rather than as an argument to trap.
interruptappears because an RTI is also used when the kernel is returning from an interrupt as well as the present case when it is returning from an trap.
Remark: A good way to use the material in the addendum is to compare the first case (user-mode f calls user-mode g) to the TRAP/RTI case line by line so that you can see the similarities and differences.
I must note that Tanenbaum is a big advocate of the so called microkernel approach in which as much as possible is moved out of the (supervisor mode) kernel into separate processes. The (hopefully small) portion left in supervisor mode is called a microkernel.
In the early 90s this was popular.
Digital Unix (now called True64) and Windows NT/2000/XP/Vista are
examples.
Digital Unix is based on Mach, a research OS from Carnegie Mellon
university.
Lately, the growing popularity of Linux has called into
question the belief that
all new operating systems will be microkernel based
.
The previous picture: one big program
The system switches from user mode to kernel mode during the poof and
then back when the OS does a return
(an RTI or return
from interrupt).
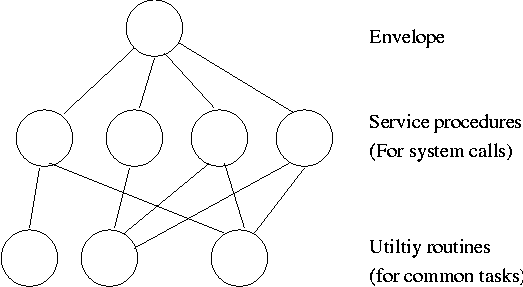
But of course we can structure the system better, which brings us to.
Some systems have more layers and are more strictly structured.
An early layered system was THE
operating system by
Dijkstra and his students at Technische Hogeschool Eindhoven.
This was a simple batch system so the operator
was the user.
The layering was done by convention, i.e. there was no enforcement by hardware and the entire OS is linked together as one program. This is true of many modern OS systems as well (e.g., linux).
The multics system was layered in a more formal manner. The hardware provided several protection layers and the OS used them. That is, arbitrary code could not jump into or access data in a more protected layer.
The idea is to have the kernel, i.e. the portion running in supervisor mode, as small as possible and to have most of the operating system functionality provided by separate processes. The microkernel provides just enough to implement processes.
This does have advantages. For example an error in the file server cannot corrupt memory in the process server since they have separate address spaces (they are after all separate process). Confining the effect of errors makes them easier to track down. Also an error in the ethernet driver can corrupt or stop network communication, but it cannot crash the system as a whole.
But the microkernel approach does mean that when a (real) user process makes a system call there are more processes switches. These are not free.
Related to microkernels is the idea of putting the mechanism in the kernel, but not the policy. For example, the kernel would know how to select the highest priority process and run it, but some user-mode process would assign the priorities. One could envision changing the priority scheme being a relatively minor event compared to the situation in monolithic systems where the entire kernel must be relinked and rebooted.
Dennis Ritchie, the inventor of the C programming language and co-inventor, with Ken Thompson, of Unix was interviewed in February 2003. The following is from that interview.
What's your opinion on microkernels vs. monolithic?
Dennis Ritchie: They're not all that different when you actually use them. "Micro" kernels tend to be pretty large these days, and "monolithic" kernels with loadable device drivers are taking up more of the advantages claimed for microkernels.
I should note, however, that the Minix microkernel (excluding the processes) is quite small, about 4000 lines.
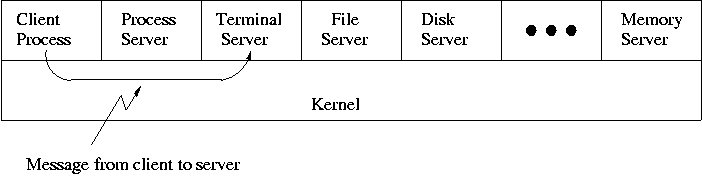
When implemented on one computer, a client-server OS often uses the microkernel approach in which the microkernel just handles communication between clients and servers, and the main OS functions are provided by a number of separate processes.
A distributed system can be thought of as an extension of the client server concept where the servers are remote.
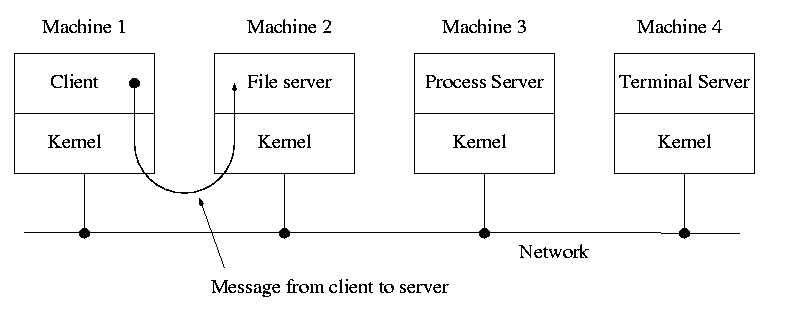
Today with plentiful memory, each machine would have all the different servers. So the only reason am OS-internal message would go to another computer is if the originating process wished to communicate with a specific process on that computer (for example wanted to access a remote disk).
Distributes systems are becoming increasingly important for application programs. Perhaps the program needs data found only on certain machine (no one machine has all the data). For example, think of (legal, of course) file sharing programs.
Homework: 24