Start Lecture #2
Homework: Read Chapter 1 (Introduction)
Software (and hardware, but that is not this course) is often implemented in layers. The higher layers use the facilities provided by lower layers.
Alternatively said, the upper layers are written using a more powerful and more abstract virtual machine than the lower layers.
In other words, each layer is written as though it runs on the virtual machine supplied by the lower layers and in turn provides a more abstract (pleasant) virtual machine for the higher layers to run on.
Using a broad brush, the layers are.
An important distinction is that the kernel runs in privileged/kernel/supervisor mode); whereas compilers, editors, shell, linkers. browsers etc run in user mode.
The kernel itself is itself normally layered, e.g.
The machine independent I/O part is written assuming
virtual (i.e. idealized) hardware
.
For example, the machine independent I/O portion simply reads a
block from a disk
.
But in reality one must deal with the specific disk controller.
Often the machine independent part is more than one layer.
The term OS is not well defined. Is it just the kernel? How about the libraries? The utilities? All these are certainly system software but it is not clear how much is part of the OS.
As mentioned above, the OS raises the abstraction level by providing a higher level virtual machine. A second related key objective for the OS is to manage the resources provided by this virtual machine.
The kernel itself raises the level of abstraction and hides details. For example a user (of the kernel) can write to a file (a concept not present in hardware) and ignore whether the file resides on a floppy, a CD-ROM, or a hard disk. The user can also ignore issues such as whether the file is stored contiguously or is broken into blocks.
Well designed abstractions are a key to managing complexity.
The kernel must manage the resources to resolve conflicts between users. Note that when we say users, we are not referring directly to humans, but instead to processes (typically) running on behalf of humans.
Typically the resource is shared or multiplexed between the users. This can take the form of time-multiplexing, where the users take turns (e.g., the processor resource) or space-multiplexing, where each user gets a part of the resource (e.g., a disk drive).
With sharing comes various issues such as protection, privacy, fairness, etc.
Homework: What are the two main functions of an operating system?
Answer: Concurrency! Per Brinch Hansen in Operating Systems Principles (Prentice Hall, 1973) writes.
The main difficulty of multiprogramming is that concurrent activities can interact in a time-dependent manner, which makes it practically impossibly to locate programming errors by systematic testing. Perhaps, more than anything else, this explains the difficulty of making operating systems reliable.
Homework: 1. (unless otherwise stated, problems numbers are from the end of the current chapter in Tanenbaum.)
The subsection heading describe the hardware as well as the OS; we are naturally more interested in the latter. These two development paths are related as the improving hardware enabled the more advanced OS features.
One user (program; perhaps several humans) at a time. Although this time frame predates my own usage, computers without serious operating systems existed during the second generation and were now available to a wider (but still very select) audience.
I have fond memories of the Bendix G-15 (paper tape) and the IBM 1620 (cards; typewriter; decimal). During the short time you had the machine, it was truly a personal computer.
Many jobs were batched together, but the systems were still uniprogrammed, a job once started was run to completion without interruption and then flushed from the system.
A change from the previous generation is that the OS was not reloaded for each job and hence needed to be protected from the user's execution. Previously, the beginning of your job contained the trivial OS-like support features.
The batches of user jobs were prepared offline (cards to tape) using a separate computer (an IBM 1401 with a 1402 reader/punch). The tape was brought to the main computer (an IBM 7090/7094) where the output to be printed was written on another tape. This tape went back to the 1401 and was printed on a 1403.
In my opinion this is the biggest change from the OS point of view. It is with multiprogramming (multiple users executing concurrently) that we have the operating system fielding requests whose arrival order is non-deterministic (at the pragmatic level). Now operating systems become notoriously hard to get right due to the inability to test a significant percentage of the possible interactions and the inability to reproduce bugs on request.
efficientuser of resources, but is more difficult.
holesarise.
spoolingtheir own jobs on a remote terminal. Deciding when to switch and which process to switch to is called scheduling.
Homework: Why was timesharing not widespread on second generation computers?
Homework: 2.
Remark: I very much recommend reading all of 1.2, not for this course especially, but for general interest. Tanenbaum writes well and is my age so lived through much of the history himself.
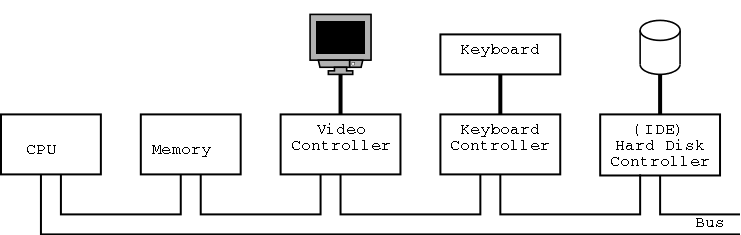
The picture above is very simplified. (For one thing, today separate buses are used to Memory and Video.)
A bus is a set of wires that connect two or more devices.
Only one message can be on the bus at a time.
All the devices receive
the message:
There are no switches in between to steer the message to the desired
destination, but often some of the wires form an address that
indicates which devices should actually process the message.
Only at a few points will we get into sufficient detail to need to understand the various processor registers such as program counters, stack pointers, and Program Status Words (PSWs). We will ignore computer design issues such as pipelining and superscalar.
We do, however, need the notion of a trap, that is an instruction that atomically switches the processor into privileged mode and jumps to a pre-defined physical address. We will have much more to say about traps later in the course.
Many of the OS issues introduced by muti-processors of any flavor are also found in a uni-processor, multi-programmed system. In particular, successfully handling the concurrency offered by the second class of systems, goes a long way toward preparing for the first class. The remaining multi-processor issues are not covered in this course.
We will ignore caches, but will (later) discuss demand paging, which is very similar (although demand paging and caches use largely disjoint terminology). In both cases, the goal is to combine large, slow memory with small, fast memory to achieve the effect of large, fast memory. We cover caches in our computer design (aka architecture) courses (you can access my class notes off my home page).
The central memory in a system is called RAM (Random Access Memory). A key point is that it is volatile, i.e. the memory loses its data if power is turned off.
ROM (Read Only Memory) is used for (low-level control) software that often comes with devices on general purpose computers, and for the entire software system on non-user-programmable devices such as microwaves and wristwatches. It is also used for non-changing data. A modern, familiar ROM is CD-ROM (or the denser DVD, or the even denser Blu-ray). ROM is non-volatile.
But often this unchangable data needs to be changed (e.g., to fix bugs). This gives rise first to PROM (Programmable ROM), which, like a CD-R, can be written once (as opposed to being mass produced already written like a CD-ROM), and then to EPROM (Erasable PROM), which is like a CD-RW. An EPROM is especially convenient if it can be erased with a normal circuit (EEPROM, Electrically EPROM or Flash RAM).
As mentioned above when discussing OS/MFT and OS/MVT, multiprogramming requires that we protect one process from another. That is we need to translate the virtual addresses of each program into physical addresses such that the physical address of each process do not clash. The hardware that performs this translation is called the MMU or Memory Management Unit.
When context switching from one process to another, the translation must change, which can be an expensive operation.
When we do I/O for real, I will show a real disk opened up and illustrate the components
Devices are often quite difficult to manage and a separate computer, called a controller, is used to translate OS commands into what the device requires.
The bottom of the memory hierarchy, tapes have large capacities, tiny cost per byte, and very long access times.
In addition to the disks and tapes just mentioned, I/O devices include monitors (and graphics controllers), NICs (Network Interface Controllers), Modems, Keyboards, Mice, etc.
The OS communicates with the device controller, not with the device itself. For each different controller, a corresponding device driver is included in the OS. Note that, for example, many graphics controllers are capable of controlling a standard monitor, and hence the OS needs many graphics device drivers.
In theory any SCSI (Small Computer System Interconnect) controller can control any SCSI disk. In practice this is not true as SCSI gets inproved to wide scsi, ultra scsi, etc. The newer controllers can still control the older disks and often the newer disks can run in degraded mode with an older controller.
Three methods are employed.
We discuss these alternatives more in chapter 5. In particular, we explain the last point about halving bus accesses.
Homework: 3.
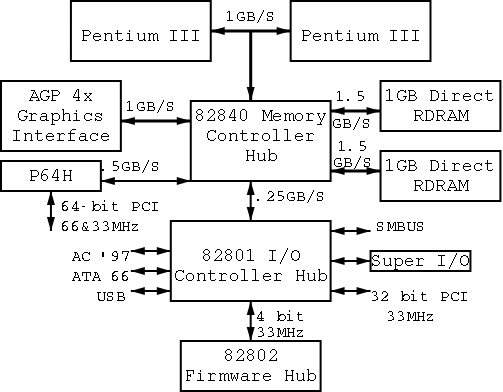
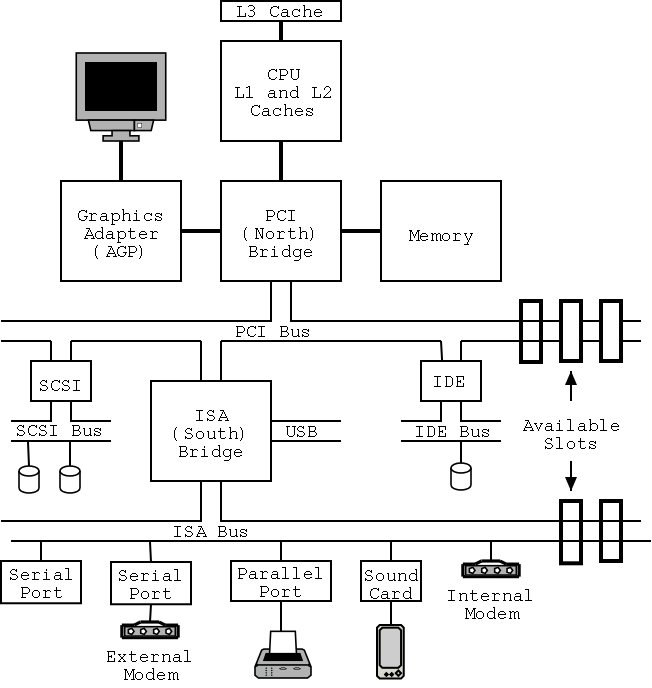
On the right is a figure showing the specifications for an Intel chip set introduced in 2000. Many different names are used, e.g., hubs are often called bridges. Most likely due to their location on the diagram to the right, the Memory Controller Hub is called the Northbridge and the I/O Controller Hub the Southbridge.
As shown on the right the chip set has two different width PCI buses. The figure below, which includes some devices themselves, does not show the two different PCI buses. This particular chip set supplies USB, but others do not. In the latter case, a PCI USB controller may be used.
The use of ISA (Industry Standard Architecture) is decreasing but is still found on most southbridges.
Note that the diagram below, which is close to figure 1-12 of the 3e differs from the figure to the right in at least two respects. The connection between the bridges is a proprietary bus and the PCI bus is generated by the Northbridge. The figure on the right is definitely correct for the specific chip set described and is very similar to the Wikipedia article.
Remark: In January 2008, I received an email reply from Tanenbaum stating that he will try to fix the diagram in the book in the next printing.
When the power button is pressed control starts at the BIOS a
(typically flash) ROM in the system.
Control is then passed to (the tiny program stored in) the MBR
(Master Boot Record), which is the first 512-byte block on the
primary
disk.
Control then proceeds to the first block in the active
partition and from there the OS (normally via an OS loader) is
finally invoked.
The above assumes that the boot medium selected by the bios was the hard disk. Other possibilities include: floppy, CD-ROM, NIC.
There is not much difference between mainframe, server, multiprocessor, and PC OS's. Indeed 3e has considerably softened the differences given in the 2e. For example Unix/Linux and Windows runs on all of them.
This course covers these four classes (or one class).
Used in data centers, these systems ofter tremendous I/O capabilities and extensive fault tolerance.
Perhaps the most important servers today are web servers. Again I/O (and network) performance are critical.
A multiprocessor (as opposed to a multi-computer or multiple computers or computer network or grid) means multiple processors sharing memory and controlled by a single instance of the OS, which typically can run on any of the processors. Often it can run on several simultaneously.
These existed almost from the beginning of the computer age, but now are not exotic. Indeed even my laptop is a multiprocessor.
The operating system(s) controlling a system of multiple computers often are classified as either a Network OS, which is basically a collection of ordinary PCs on a LAN that use the network facilities available on PC operating systems. Some extra utilities are often present to ease running jobs on other processors.
A more sophisticated Distributed OS is a
more seamless
version of the above where the boundaries
between the processors are made nearly invisible to users (except
for performance).
This subject is not part of our course (but often is covered G22.2251).
In the recent past some OS systems (e.g., ME) were claimed to be tailored to client operation. Others felt that they were restricted to client operation. This seems to be gone now; a modern PC OS is fully functional. I guess for marketing reasons some of the functionality can be disabled.
This includes PDAs and phones, which are rapidly merging.
The only real difference between this class and the above is the
restriction to very modest memory.
However, very modest
keeps getting bigger and some phones now
include a stripped-down linux.
The OS is part of
the device, e.g., microwave ovens,
and cardiac monitors.
The OS is on a ROM so is not changed.
Since no user code is run, protection is not as important. In that respect the OS is similar to the very earliest computers. Embedded OS are very important commercially, but not covered much in this course.
Embedded systems that also contain sensors and communication devices so that the systems in an area can cooperate.
As the name suggests, time (more accurately timeliness) is an important consideration. There are two classes: Soft vs hard real time. In the latter missing a deadline is a fatal error—sometimes literally. Very important commercially, but not covered much in this course.
Very limited in power (both meanings of the word).
This will be very brief.
Much of the rest of the course will consist of
filling in the details
.
A process is program in execution. If you run the same program twice, you have created two processes. For example if you have two editors running in two windows, each instance of the editor is a separate process.
Often one distinguishes the state or context of a process—its
address space (roughly its memory image), open files), etc.—
from the thread of control.
If one has many threads running in the same task,
the result is a multithreaded processes
.
The OS keeps information about all processes in the process table. Indeed, the OS views the process as the entry. This is an example of an active entity being viewed as a data structure (cf. discrete event simulations), an observation made by Finkel in his (out of print) OS textbook.
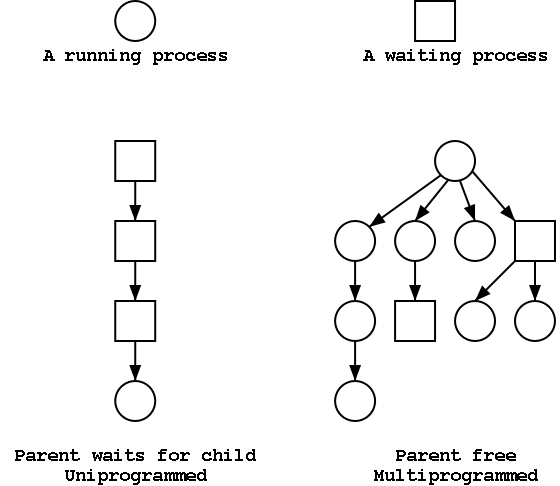
The set of processes forms a tree via the fork system call.
The forker is the parent of the forkee, which is
called a child.
If the system always blocks the parent until the child finishes, the
tree
is quite simple, just a line.
But the parent (in many OSes) is free to continue executing and in
particular is free to fork again producing another child.
A process can send a signal to another process to
cause the latter to execute a predefined function (the signal
handler).
It can be tricky to write a program with a signal handler since the
programmer does not know when in the mainline
program the
signal handler will be invoked.
Each user is assigned a User IDentification (UID) and all processes created by that user have this UID. A child has the same UID as its parent. It is sometimes possible to change the UID of a running process. A group of users can be formed and given a Group IDentification, GID. One UID is special (the superuser or administrator) and has extra privileges.
Access to files and devices can be limited to a given UID or GID.