Operating Systems
Start Lecture #4
Remark: Lab 2 assigned.
It is due in 2 weeks, 27 September 2008.
Solving the Producer-Consumer Problem Using Semaphores
Note that my definition of semaphore is different from Tanenbaum's
so it is not surprising that my solution is also different from his.
Unlike the previous problems of mutual exclusion, the
producer-consumer has two classes of processes
- Producers, which produce times and insert them into a buffer.
- Consumers, which remove items and consume them.
What happens if the producer encounters a full buffer?
Answer: It waits for the buffer to become non-full.
What if the consumer encounters an empty buffer?
Answer: It waits for the buffer to become non-empty.
The producer-consumer problem is also called the
bounded buffer problem, which is another example of
active entities being replaced by a data structure when viewed at
a lower level (Finkel's level principle).
Initially e=k, f=0 (counting semaphore); b=open (binary semaphore)
Producer Consumer
loop forever loop forever
produce-item P(f)
P(e) P(b); take item from buf; V(b)
P(b); add item to buf; V(b) V(e)
V(f) consume-item
- k is the size of the buffer
- e represents the number of empty buffer slots
- f represents the number of full buffer slots
- We assume the buffer itself is only serially accessible. That is,
only one operation at a time.
- This explains the P(b) V(b) around buffer operations
- I use ; and put three statements on one line to suggest that
a buffer insertion or removal is viewed as one atomic operation.
- Of course this writing style is only a convention, the
enforcement of atomicity is done by the P/V.
- The P(e), V(f) motif is used to force
bounded
alternation
. If k=1 it gives strict alternation.
2.3.6 Mutexes
Remark: Whereas we use the term semaphore to mean
binary semaphore and explicitly say generalized or counting
semaphore for the positive integer version, Tanenbaum uses semaphore
for the positive integer solution and mutex for the binary version.
Also, as indicated above, for Tanenbaum semaphore/mutex implies a
blocking primitive; whereas I use binary/counting semaphore for both
busy-waiting and blocking implementations.
Finally, remember that in this course we are
studying only busy-waiting solutions.
My Terminology
| | Busy wait | block/switch |
|---|
| critical | (binary) semaphore | (binary) semaphore |
| semi-critical | counting semaphore | counting semaphore |
Tanenbaum's Terminology
| | Busy wait | block/switch |
|---|
| critical | enter/leave region | mutex |
| semi-critical | no name | semaphore |
Mutexes in Pthreads
Skipped.
2.3.7 Monitors
Skipped.
2.3.8 Message Passing
Skipped.
2.3.9 Barriers
You can find some information on barriers in my
lecture notes
for a follow-on course (see in particular lecture number 16).
2.5 Classical IPC Problems
Tanenbaum reversed the order of 2.4 and 2.5 in the 3e.
I think it is more logical to do the classical IPC problems right
after learning about the IPC mechanisms so I am doing 2.5 before
2.4.
2.5.0 The Producer-Consumer (or Bounded Buffer) Problem
We did this previously.
2.5.1 The Dining Philosophers Problem
A classical problem from Dijkstra
- 5 philosophers sitting at a round table
- Each has a plate of spaghetti
- There is a fork between each two
- Need two forks to eat
What algorithm do you use for access to the shared resource (the
forks)?
- The obvious solution (pick up right; pick up left) deadlocks.
- Big lock around everything serializes.
- Good code in the book.
The purpose of mentioning the Dining Philosophers problem without
giving the solution is to give a feel of what coordination problems
are like.
The book gives others as well.
The solutions would be covered in a sequel course.
If you are interested look, for example, at
here.
Homework: 45 and 46 (these have short answers but
are not easy).
Note that the second problem refers to fig. 2-20, which is
incorrect.
It should be fig 2-46.
2.5.2 The Readers and Writers Problem
As in the producer-consumer problem we have
two classes of processes.
- Readers, which can work concurrently.
- Writers, which need exclusive access.
The problem is to
- prevent 2 writers from being concurrent.
- prevent a reader and a writer from being concurrent.
- permit readers to be concurrent when no writer is active.
- (perhaps) insure fairness (e.g., freedom from starvation).
Variants
- Writer-priority readers/writers.
- Reader-priority readers/writers.
Quite useful in multiprocessor operating systems and database
systems.
The easy way out
is to treat all processes as writers in
which case the problem reduces to mutual exclusion (P and V).
The disadvantage of the easy way out is that you give up reader
concurrency.
Again for more information see the web page referenced above.
2.5A Critical Sections versus Database Transactions
Critical Sections have a form of atomicity, in some ways similar to
transactions.
But there is a key difference: With critical sections you have
certain blocks of code, say A, B, and C, that are mutually exclusive
(i.e., are atomic with respect to each other) and other blocks, say
D and E, that are mutually exclusive; but blocks from different
critical sections, say A and D, are not mutually exclusive.
The day after giving this lecture in 2006-07-spring, I found a
modern reference to the same question.
The quote below is from
Subtleties of Transactional Memory Atomicity Semantics
by Blundell, Lewis, and Martin in
Computer Architecture Letters
(volume 5, number 2, July-Dec. 2006, pp. 65-66).
As mentioned above, busy-waiting (binary) semaphores are often
called locks (or spin locks).
... conversion (of a critical section to a transaction) broadens
the scope of atomicity, thus changing the program's semantics: a
critical section that was previously atomic only with respect to
other critical sections guarded by the same lock is now atomic
with respect to all other critical sections.
2.5B: Summary of 2.3 and 2.5
We began with a problem (wrong answer for x++ and x--) and used it to
motivate the Critical Section Problem for which we provided a
(software) solution.
We then defined (binary) Semaphores and showed that a
Semaphore easily solves the critical section problem and doesn't
require knowledge of how many processes are competing for the critical
section. We gave an implementation using Test-and-Set.
We then gave an operational definition of Semaphore (which is
not an implementation) and morphed this definition to obtain a
Counting (or Generalized) Semaphore, for which we gave
NO implementation.
I asserted that a counting semaphore can be implemented using 2
binary semaphores and gave a reference.
We defined the Producer-Consumer (or Bounded Buffer) Problem
and showed that it can be solved using counting semaphores (and binary
semaphores, which are a special case).
Finally we briefly discussed some classical problem, but did not
give (full) solutions.
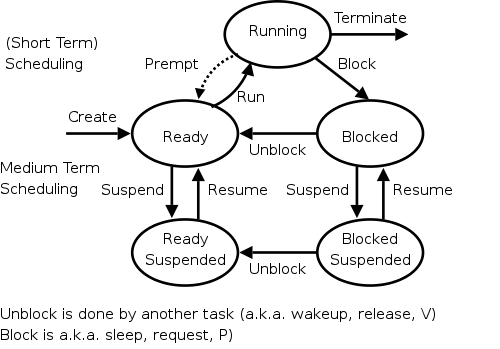
2.4 Process Scheduling
Scheduling processes on the processor is often called
processor scheduling
or simply scheduling
.
As we shall see later in the course, a more descriptive name would
be short-term, processor scheduling
.
For now we are discussing the arcs
connecting running<-->ready in the diagram on the right
showing the various states of a process.
Medium term scheduling is discussed later as is disk-arm scheduling.
Naturally, the part of the OS responsible for (short-term, processor)
scheduling is called the (short-term, processor)
scheduler and the algorithm uses is called the
(short-term, processor) scheduling algorithm.
2.4.1 Introduction to Scheduling
Importance and Difficulty for Various Generations and Circumstances
Early computer systems were monoprogrammed and, as a result,
scheduling was a non-issue.
For many current personal computers, which are definitely
multiprogrammed, there is in fact very rarely more than one runnable
process.
As a result, scheduling is not critical.
For servers (or old mainframes), scheduling is indeed important and
these are the systems you should think of.
Process Behavior
Processes alternate CPU bursts with I/O activity, as we shall see
in lab2.
The key distinguishing factor between compute-bound (aka CPU-bound)
and I/O-bound jobs is the length of the CPU bursts.
The trend over the past decade or two has been for more and more
jobs to become I/O-bound since the CPU rates have increased faster
than the I/O rates.
When to Schedule
An obvious point, which is often forgotten (I don't think 3e
mentions it) is that the scheduler cannot run when
the OS is not running.
In particular, for the uniprocessor systems we are considering, no
scheduling can occur when a user process is running.
(In the mulitprocessor situation, no scheduling can occur when all
processors are running user jobs).
Again we refer to the state transition diagram above.
- Process creation.
The running process has issued a fork() system call and hence
the OS runs; thus scheduling is possible.
Scheduling is also desirable at this time since
the scheduling algorithm might favor the new process.
- Process termination.
The exit() system call has again transferred control to the OS
so scheduling is possible.
It is necessary since the previously running
process has terminated.
- Process blocks.
Same as termination.
- Interrupt received.
Since the OS takes control, scheduling is possible.
When an I/O interrupt occurs, this normally means that a blocked
process is now ready and, with a new candidate for running,
scheduling is desirable.
- Clock interrupts are treated next when we discuss preemption
and discuss the last arc in the (top triangle of the) process
state diagram.
Preemption
It is important to distinguish preemptive from non-preemptive
scheduling algorithms.
- Preemption means the operating system moves a process from running
to ready without the process requesting it.
- Without preemption, the system implements
run to completion (or yield or block)
.
- The
preempt
arc in the diagram is present for
preemptive scheduling algorithms.
- We do not emphasize yield (a solid arrow from running to ready).
- Preemption needs a clock interrupt (or equivalent).
- Preemption is needed to guarantee fairness.
- Preemption is found in all modern general purpose operating systems.
- Even non preemptive systems are multiprogrammed (remember that
processes do block for I/O).
- Preemption is not cheap.
Categories of Scheduling Algorithms
We distinguish three categories with regard to the importance of
preemption.
- Batch.
- Interactive.
- Real Time.
For multiprogramed batch systems (we don't consider uniprogrammed
systems, which don't need schedulers) the primary concern is
efficiency.
Since no user is waiting at a terminal, preemption is not crucial
and if it is used, each process is given a long time period before
being preempted.
For interactive systems (and multiuser servers), preemption is
crucial for fairness and rapid response time to short requests.
We don't study real time systems in this course, but can say that
preemption is typically not important since all the processes are
cooperating and are programmed to do their task in a prescribed time
window.
Scheduling Algorithm Goals
There are numerous objectives, several of which conflict, that a
scheduler tries to achieve.
these include.
- Fairness.
Treating users fairly, which must be balanced against ...
- Respecting priority.
That is, giving more important processes
higher priority.
For example, if my laptop is trying to fold proteins in the
background, I don't want that activity to appreciably slow down
my compiles and especially don't want it to make my system seem
sluggish when I am modifying these class notes.
For example, interactive
jobs should have higher
priority.
- Efficiency.
This has two aspects.
- Do not spend excessive time in the scheduler.
- Try to keep all parts of the system busy.
- Low turnaround time
That is, minimize the time from the submission of a
job
to its termination.
This is important for batch jobs.
- High throughput.
That is, maximize the number of jobs completed per day.
Not quite the same as minimizing the (average) turnaround time
as we shall see when we discuss shortest job first
.
- Low response time.
That is, minimize the time from when an interactive user issues
a command to when the response is given.
This is very important for interactive jobs.
- Repeatability.
Dartmouth (DTSS)
wasted cycles
and limited logins for
repeatability.
- Degrade gracefully under load.
Deadline scheduling
This is used for real time systems.
The objective of the scheduler is to find a schedule for all the
tasks (there are a fixed set of tasks) so that each meets its
deadline.
The run time of each task is known in advance.
Actually it is more complicated.
- Periodic tasks
- What if we can't schedule all task so that each meets its deadline
(i.e., what should be the penalty function)?
- What if the run-time is not constant but has a known probability
distribution?
We do not cover deadline scheduling in this course.
The Name Game
There is an amazing inconsistency in naming the different
(short-term) scheduling algorithms.
Over the years I have used primarily 4 books: In chronological order
they are Finkel, Deitel, Silberschatz, and Tanenbaum.
The table just below illustrates the name game for these four books.
After the table we discuss several scheduling policy in some detail.
Finkel Deitel Silbershatz Tanenbaum
-------------------------------------
FCFS FIFO FCFS FCFS
RR RR RR RR
PS ** PS PS
SRR ** SRR ** not in tanenbaum
SPN SJF SJF SJF
PSPN SRT PSJF/SRTF SRTF
HPRN HRN ** ** not in tanenbaum
** ** MLQ ** only in silbershatz
FB MLFQ MLFQ MQ
Remark: For an alternate organization of the
scheduling algorithms (due to Eric Freudenthal and presented by him
Fall 2002) click here.
2.4.2 Scheduling in Batch Systems
First Come First Served (FCFS, FIFO, FCFS, --)
If the OS doesn't
schedule, it still needs to store the list
of ready processes in some manner.
If it is a queue you get FCFS.
If it is a stack (strange), you get LCFS.
Perhaps you could get some sort of random policy as well.
- Only FCFS is considered.
- Non-preemptive.
- The simplist scheduling policy.
- In some sense the fairest since it is first come first served.
But perhaps that is not so fair—Consider a 1 hour job
submitted one second before a 3 second job.
- The most efficient usage of cpu since the scheduler is very
fast.
- Does not favor interactive jobs.
Shortest Job First (SPN, SJF, SJF, SJF)
Sort jobs by execution time needed and run the shortest first.
- Nonpreemptive
- First consider a static situation where all jobs are available
in the beginning and we know how long each one takes to run.
For simplicity lets consider
run-to-completion
, also
called uniprogrammed
(i.e., we don't even switch to
another process on I/O).
In this situation, uniprogrammed SJF has the shortest average
waiting time.
- Assume you have a schedule with a long job right before a
short job.
- Consider swapping the two jobs.
- This decreases the wait for the short by the length of the
long job and increases the wait of the long job by the
length of the short job.
- This decreases the total waiting time for these two.
- Hence decreases the total waiting for all jobs and hence decreases
the average waiting time as well.
- Hence, whenever a long job is right before a short job, we can
swap them and decrease the average waiting time.
- Thus the lowest average waiting time occurs when there are no
short jobs right before long jobs.
- This is uniprogrammed SJF.
- The above argument illustrates an advantage of favoring short
jobs (e.g., RR with small quantum—): the average waiting
time is reduced.
- In the more realistic case of true SJF where the scheduler
switches to a new process when the currently running process
blocks (say for I/O), we should call the policy shortest
next-CPU-burst first.
- The difficulty is predicting the future (i.e., knowing in advance
the time required for the job or next-CPU-burst).
Shortest Remaining Time Next (PSPN, SRT, PSJF/SRTF, SRTF)
Preemptive version of above.
Indeed some authors call it essentially preemptive shortest job
first.
- Permit a process that enters the ready list to preempt the running
process if the time for the new process (or for its next burst) is
less than the remaining time for the running process (or for
its current burst).
- It will never happen that a process already in the ready list
will require less time than the remaining time for the currently
running process.
Why?
Ans: When the process joined the ready list it would have
started running if the current process had more time remaining.
Since that didn't happen the current job had less time remaining
and now it has even less.
- Can starve a process that require a long burst.
- This is fixed by the standard technique.
- What is that technique?
Ans: Priority aging (see below).
2.4.3 Scheduling in Interactive Systems
The following algorithms can also be used for batch systems, but in
that case, the gain may not justify the extra complexity.
Round Robin (RR, RR, RR, RR)
- An important preemptive policy.
- Essentially the preemptive version of FCFS.
- Note that RR works well if you have a 1 hr job and then a 3 second
job.
- The key parameter is the quantum size q.
- When a process is put into the running state a timer is set to q.
- If the timer goes off and the process is still running, the OS
preempts the process.
- This process is moved to the ready state (the
preempt arc in the diagram), where it is placed at the
rear of the ready list.
- The process at the front of the ready list is removed from
the ready list and run (i.e., moves to state running).
- Note that the ready list is being treated as a queue.
Indeed it is sometimes called the ready queue, but not by me
since for other scheduling algorithms it is not accessed in a
FIFO manner.
- When a process is created, it is placed at the rear of the ready
list.
- As q gets large, RR approaches FCFS.
Indeed if q is larger that the longest time a process can run
before terminating or blocking, then RR IS FCFS.
A good way to see this is to look at my favorite diagram and note
the three arcs leaving running.
They are
triggered
by three conditions: process
terminating, process blocking, and process preempted.
If the first trigger condition to arise is never preemption, we
can erase that arc and then RR becomes FCFS.
- As q gets small, RR approaches PS (Processor Sharing, described
next).
- What value of q should we choose?
- Trade-off
- Small q makes system more responsive, a long compute-bound job
cannot starve a short job.
- Large q makes system more efficient since less process switching.
- A reasonable time for q is a few tens of milliseconds
(millisecond = 1/1000 second).
This means each other job can delay your job by at most q
(plus the context switch time CS, which is much less than 1ms).
Also the overhead is CS/(CS+q), which is small.
- A student found the following
reference for the name Round Robin.
The round robin was originally a petition, its signatures
arranged in a circular form to disguise the order of signing.
Most probably it takes its name from the ruban rond
,
round ribbon
, in 17th-century France, where government
officials devised a method of signing their petitions of
grievances on ribbons that were attached to the documents in a
circular form.
In that way no signer could be accused of signing the document
first and risk having his head chopped off for instigating
trouble.
Ruban rond
later became round robin
in English and
the custom continued in the British navy, where petitions of
grievances were signed as if the signatures were spokes of a
wheel radiating from its hub.
Today round robin
usually means a sports tournament where
all of the contestants play each other at least once and losing
a match doesn't result in immediate elimination.
Encyclopedia of Word and Phrase Origins by Robert Hendrickson
(Facts on File, New York, 1997).
Homework: 20, 35.
Homework:
Round-robin schedulers normally maintain a list of all runnable
processes, with each process occurring exactly once in the list.
What would happen if a process occurred in the list?
Can you think of any reason for allowing this?
Homework: Give an argument favoring a large
quantum; give an argument favoring a small quantum.
| Process | CPU Time | Creation Time |
|---|
| P1 | 20 | 0 |
| P2 | 3 | 3 |
| P3 | 2 | 5 |
Homework:
- Consider the set of processes in the table to the right.
- When does each process finish if RR scheduling is used with q=1,
if q=2, if q=3, if q=100?
- First assume (unrealistically) that context switch time is zero.
- Then assume it is .1. Each process performs no I/O (i.e., no
process ever blocks).
- All times are in milliseconds.
- The CPU time is the total time required for the process (excluding
any context switch time).
- The creation time is the time when the process is created.
So P1 is created when the problem begins and P3 is created 5
milliseconds later.
- If two processes have equal priority (in RR this means if thy
both enter the ready state at the same cycle), we give priority
(in RR this means place first on the queue) to the process with
the earliest creation time.
If they also have the same creation time, then we give priority
to the process with the lower number.
- Remind me to discuss this last one in class next time.
Homework:
Redo the previous homework for q=2 with the following change.
After process P1 runs for 3ms (milliseconds), it blocks
for 2ms.
P1 never blocks again.
P2 never blocks.
After P3 runs for 1 ms it blocks for 1ms.
Remind me to answer this one in class next lecture.
Processor Sharing (PS, **, PS, PS)
Merge the ready and running states and permit all ready jobs to be
run at once.
However, the processor slows down so that when n jobs are running at
once, each progresses at a speed 1/n as fast as it would if it were
running alone.
- Clearly impossible as stated due to the overhead of process
switching.
- Of theoretical interest (easy to analyze).
- Approximated by RR when the quantum is small.
Make sure you understand this last point.
For example, consider the last homework assignment (with zero
context switch time and no blocking) and consider q=1, q=.1,
q=.01, etc.
- Show what happens for 3 processes, A, B, C, each requiring 3
seconds of CPU time.
A starts at time 0, B at 1 second, C at 2.
- Consider three processes all starting at time 0.
One requires 1ms, the second 100ms, the third 10sec (seconds).
Compute the total/average waiting time for RR q=1ms, PS, SJF,
SRTN, and FCFS.
Note that this depends on the order the processes happen to be
processed in.
The effect is huge for FCFS, modest for RR with modest quantum,
and non-existent for PS and SRTN.
Homework: 32.
Variants of Round Robin
- State dependent RR
- Same as RR but q is varied dynamically depending on the state
of the system.
- Favor processes holding important resources.
- For example, non-swappable memory.
- Perhaps this should be considered medium term scheduling
since you probably do not recalculate q each time.
- External priorities: RR but a user can pay more and get
bigger q.
That is, one process can be given a higher priority than another.
But this is not an absolute priority: the lower priority (i.e.,
less important) process does get to run, but not as much as the
higher priority process.
Priority Scheduling
Each job is assigned a priority (externally, perhaps by charging
more for higher priority) and the highest priority ready job is run.
- Similar to
External priorities
above
- If many processes have the highest priority, use RR among
them.
Indeed one often groups several priorities into a priority class
and employs RR within a class.
- Can easily starve processes (see aging below for fix).
- Can have the priorities changed dynamically to favor processes
holding important resources (similar to state dependent RR).
- Many policies can be thought of as priority scheduling in
which we run the job with the highest priority.
The different scheduling policies have different notions of
priority.
For example:
- FIFO and RR are priority scheduling where the priority is
the time spent on the ready list/queue.
- SJF and SRTN are priority scheduling, where the
priority of the job is the negative of the time it needs to
run in order to complete (or complete its current CPU
burst).
Priority aging
As a job is waiting, raise its priority so eventually it will have the
maximum priority.
- This prevents starvation (assuming all jobs terminate or the
policy is preemptive).
- Starvation means that some process is never run, because it
never has the highest priority. It is also starvation, if process
A runs for a while, but then is never able to run again, even
though it is ready.
The formal way to say this is
No job can remain in the ready
state forever
.
- There may be many processes with the maximum priority.
- If so, can use FIFO among those with max priority (risks
starvation if a job doesn't terminate) or can use RR.
- Can apply priority aging to many policies, in particular to priority
scheduling described above.
Homework: 36, 37.
Note that when the book says RR with each process getting its fair
share, it means Processor Sharing.
Selfish RR (SRR, **, SRR, **)
- Preemptive.
- Perhaps it should be called
snobbish RR
.
Accepted processes
run RR.
- Accepted process have their priority increase at rate a≥0.
- A new process starts at priority 0; its priority increases at rate b≥0.
- An unaccepted process becomes an accepted process when its
priority reaches that of an accepted process (or when there are no
accepted processes).
- From this it follows that, once a process is accepted, it
remains accepted until it terminates.
- Note that at any time all accepted processes have same priority.
- Note that, when the only accepted process terminates, all the
process with the next highest priority become accepted.
- It is not clear what is supposed to happen when a process
blocks.
Should its priority get reset (as when it terminates) and have
unblock act like create?
Should the priority continue to grow (at rate a or b)?
Should its priority be frozen during the blockage.
Let us assume the second case (continue to grow) since it seems
the simplest.
- If b≥a, get FCFS.
- If b=0, get RR.
- If a>b>0, it is interesting.
- If b>a=0, you get RR in
batches
.
This is similar to
n-step scan for disk I/O.
Remark: Recall that SFJ/PSFJ do a good job of minimizing the average waiting
time.
The problem with them is the difficulty in finding the job whose next
CPU burst is minimal.
We now learn two scheduling algorithms that attempt to do this
(approximately).
The first one does this statically, presumably with some manual help;
the second is dynamic and fully automatic.
Multilevel Queues (**, **, MLQ, **)
Put different classes of processs in different queues
- Processes do not move from one queue to another.
- Can have different policies on the different queues.
For example, might have a background (batch) queue that is FCFS
and one or more foreground queues that are RR (possibly with
different quanta).
- Must also have a policy among the queues.
For example, might have two queues, foreground and background, and give
the first absolute priority over the second
- Might apply priority aging to prevent background starvation.
- But might not, i.e., no guarantee of service for background
processes.
View a background process as a
cycle soaker
.
- Might have 3 queues, foreground, background, cycle soaker.
Multiple Queues (FB, MFQ, MLFBQ, MQ)
As with multilevel queues above we have many queues, but now
processes move from queue to queue in an attempt to dynamically
separate batch-like
from interactive processs so that we can
favor the latter.
- Remember that average waiting time is achieved by SJF and this is
an attempt to determine dynamically those processes that are
interactive, which means have a very short cpu burst.
- Run processs from the highest priority nonempty queue in a RR manner.
- When a process uses its full quanta (looks a like batch process),
move it to a lower priority queue.
- When a process doesn't use a full quanta (looks like an interactive
process), move it to a higher priority queue.
- A long process with frequent (perhaps spurious) I/O will remain
in the upper queues.
- Might have the bottom queue FCFS.
- Many variants.
For example, might let process stay in top queue 1 quantum, next queue 2
quanta, next queue 4 quanta (i.e., sometimes return a process to
the rear of the same queue it was in if the quantum
expires).
Might might move to a higher queue only if a keyboard interrupt
occurred rather than if the quantum failed to expire for any
reason (disk I/O).
Shortest Process Next
An attempt to apply sjf to interactive scheduling.
What is needed is an estimate of how long the process will run until
it blocks again.
One method is to choose some initial estimate when the process starts
and then, whenever the process blocks choose a new estimate via
NewEstimate = A*OldEstimate + (1-A)*LastBurst
where LastBurst is the actual time used during the burst
that just ended.
Highest Penalty Ratio Next (HPRN, HRN, **, **)
Run the process that has been hurt
the most.
- For each process, let r = T/t; where T is the wall clock time this
process has been in system and t is the running time of the
process to date.
- If r=2.5, that means the job has been running 1/2.5 = 40% of the
time it has been in the system.
- We call r the penalty ratio and run the process having
the highest r value.
- We must worry about a process that just enters the system
since t=0 and hence the ratio is undefined.
Define t to be the max of 1 and the running time to date.
Since now t is at least 1, the ratio is always defined.
- HPRN is normally defined to be non-preemptive (i.e., the system
only checks r when a burst ends), but there is an preemptive analogue
- When putting process into the run state compute the time at
which it will no longer have the highest ratio and set a timer.
- When a process is moved into the ready state, compute its ratio
and preempt if needed.
- HRN stands for highest response ratio next and means the same thing.
- This policy is yet another example of priority scheduling
Guaranteed Scheduling
A variation on HPRN.
The penalty ratio is a little different.
It is nearly the reciprocal of the above, namely
t / (T/n)
where n is the multiprogramming level.
So if n is constant, this ratio is a constant times r from HPRN.
Lottery Scheduling
Each process gets a fixed number of tickets and at each scheduling
event a random ticket is drawn (with replacement)
and the process holding that ticket runs for the next interval
(probably a RR-like quantum q).
On the average a process with P percent of the tickets will get P
percent of the CPU (assuming no blocking, i.e., full quanta).
Fair-Share Scheduling
If you treat processes fairly
you may not be treating
users fairly
since users with many processes will get more
service than users with few processes.
The scheduler can group processes by user and only give one of a
user's processes a time slice before moving to another user.
Fancier methods have been implemented that give some fairness to
groups of users.
Say one group paid 30% of the cost of the computer.
That group would be entitled to 30% of the cpu cycles providing it
had at least one process active.
Furthermore a group earns some credit when it has no processes
active.
Theoretical Issues
Considerable theory has been developed.
- NP completeness results abound.
- Much work in queuing theory to predict performance.
- Not covered in this course.
Medium-Term Scheduling
In addition to the short-term scheduling we have discussed, we add
medium-term scheduling in which decisions are made at a
coarser time scale.
- Suspend (swap out) some process if memory is over-committed.
- Criteria for choosing a victim.
- How long since previously suspended.
- How much CPU time used recently.
- How much memory does it use.
- External priority (pay more, get swapped out less).
- We will discuss medium term scheduling again when we study memory
management.
Long Term Scheduling
This is sometimes called Job scheduling
.
- The system decides when to start jobs, i.e., it does not
necessarily start them when submitted.
- Force some users to log out and/or block logins if over-committed.
- CTSS (an early time sharing system at MIT) did this to insure
decent interactive response time.
- Unix does this if out of processes (i.e., out of PTEs).
LEM jobs during the day
(Grumman).
- Used at many supercomputer sites.
2.4.4 Scheduling in Real Time Systems
Skipped
2.4.5 Policy versus Mechanism
Skipped.
2.4.6 Thread Scheduling
Skipped.
2.6 Research on Processes and Threads
Skipped.
2.7 Summary
Skipped, but you should read.