Start Lecture #1
I start at -1 so that when we get to chapter 1, the numbering will agree with the text.
There is a web site for the course. You can find it from my home page, which is http://cs.nyu.edu/~gottlieb
The course text is Tanenbaum, "Modern Operating Systems", Third Edition (3e).
Replyto contribute to the current thread, but NOT to start another topic.
Grades will computed as 40%*LabAverage + 60%*FinalExam (but see homeworks below).
I use the upper left board for lab/homework assignments and announcements. I should never erase that board. Viewed as a file it is group readable (the group is those in the room), appendable by just me, and (re-)writable by no one. If you see me start to erase an announcement, let me know.
I try very hard to remember to write all announcements on the upper left board and I am normally successful. If, during class, you see that I have forgotten to record something, please let me know. HOWEVER, if I forgot and no one reminds me, the assignment has still been given.
I make a distinction between homeworks and labs.
Labs are
Homeworks are
Homeworks are numbered by the class in which they are assigned. So any homework given today is homework #1. Even if I do not give homework today, the homework assigned next class will be homework #2. Unless I explicitly state otherwise, all homeworks assignments can be found in the class notes. So the homework present in the notes for lecture #n is homework #n (even if I inadvertently forgot to write it to the upper left board).
You may solve lab assignments on any system you wish, but ...
request receiptfeature from home.nyu.edu or mail.nyu.edu and select the
when deliveredoption.
I sent it ... I never received itdebate. Thank you.
Good methods for obtaining help include
You may write your lab in Java, C, or C++.
Incomplete
The rules for incompletes and grade changes are set by the school and not the department or individual faculty member. The rules set by GSAS state:
The assignment of the grade Incomplete Pass(IP) or Incomplete Fail(IF) is at the discretion of the instructor. If an incomplete grade is not changed to a permanent grade by the instructor within one year of the beginning of the course, Incomplete Pass(IP) lapses to No Credit(N), and Incomplete Fail(IF) lapses to Failure(F).
Permanent grades may not be changed unless the original grade resulted from a clerical error.
Our policy on academic integrity, which applies to all graduate courses in the department, can be found here.
I do not assume you have had an OS course as an undergraduate, and I do not assume you have had extensive experience working with an operating system.
If you have already had an operating systems course, this course is probably not appropriate. For example, if you can explain the following concepts/terms, the course is probably too elementary for you.
I do assume you are an experienced programmer, at least to the extent that you are comfortable writing modest size (several hundred line) programs.
Originally called a linkage editor by IBM.
A linker is an example of a utility program included with an operating system distribution. Like a compiler, the linker is not part of the operating system per se, i.e. it does not run in supervisor mode. Unlike a compiler it is OS dependent (what object/load file format is used) and is not (normally) language dependent.
Link of course.
When the compiler and assembler have finished processing a module,
they produce an object module
that is almost runnable.
There are two remaining tasks to be accomplished before object modules
can be run.
Both are involved with linking (that word, again) together multiple
object modules.
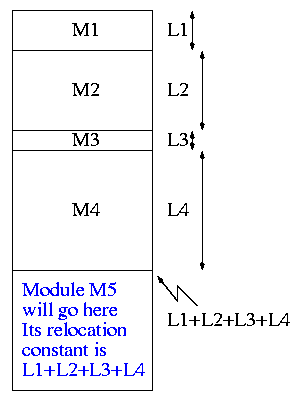
The tasks are relocating relative addresses
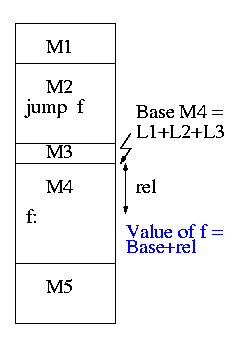
and resolving external references.
The output of a linker is called a load module because it is now ready to be loaded and run.
To see how a linker works lets consider the following example, which is the first dataset from lab #1. The description in lab1 is more detailed.
The target machine is word addressable and each word consists of 4 decimal digits. The first (leftmost) digit is the opcode and the remaining three digits form an address.
Each object module contains three parts, a definition list, a use list, and the program text itself. Each definition is a pair (sym, loc). Each entry in the use list is a symbol.
The program text consists of a count N followed by N pairs (type, word), where word is a 4-digit instruction described above and type is a single character indicating if the address in the word is Immediate, Absolute, Relative, or External.
The actions taken by the linker depend on the type of the instruction below as we now illustrate.
Input set #1 1 xy 2 2 z xy 5 R 1004 I 5678 E 2000 R 8002 E 7001 0 1 z 6 R 8001 E 1000 E 1000 E 3000 R 1002 A 1010 0 1 z 2 R 5001 E 4000 1 z 2 2 xy z 3 A 8000 E 1001 E 2000
The first pass simply finds the base address of each module and produces the symbol table giving the values for xy and z (2 and 15 respectively). The second pass does the real work using the symbol table and base addresses produced in pass one.
Symbol Table
xy=2
z=15
Memory Map
+0
0: R 1004 1004+0 = 1004
1: I 5678 5678
2: xy: E 2000 ->z 2015
3: R 8002 8002+0 = 8002
4: E 7001 ->xy 7002
+5
0 R 8001 8001+5 = 8006
1 E 1000 ->z 1015
2 E 1000 ->z 1015
3 E 3000 ->z 3015
4 R 1002 1002+5 = 1007
5 A 1010 1010
+11
0 R 5001 5001+11= 5012
1 E 4000 ->z 4015
+13
0 A 8000 8000
1 E 1001 ->z 1015
2 z: E 2000 ->xy 2002
The output above is more complex than I expect you to produce. The detail is there to help me explain what the linker is doing. All I would expect from you is the symbol table and the rightmost column of the memory map.
You must process each module separately, i.e. except for the symbol table and memory map your space requirements should be proportional to the largest module not to the sum of the modules. This does NOT make the lab harder.
Remark: It is faster (less I/O) to do a one pass
approach, but is harder since you need fix-up code
whenever a use occurs in a module that precedes the module with the
definition.
The linker on unix was mistakenly called ld (for loader), which is unfortunate since it links but does not load.
Historical remark: Unix was originally developed at Bell Labs; the seventh edition of unix was made publicly available (perhaps earlier ones were somewhat available). The 7th ed man page for ld begins (see http://cm.bell-labs.com/7thEdMan).
.TH LD 1 .SH NAME ld \- loader .SH SYNOPSIS .B ld [ option ] file ... .SH DESCRIPTION .I Ld combines several object programs into one, resolves external references, and searches libraries.
By the mid 80s the Berkeley version (4.3BSD) man
page referred to ld as link editor
and this more accurate
name is now standard in unix/linux distributions.
During the 2004-05 fall semester a student wrote to me
BTW - I have meant to tell you that I know the lady who
wrote ld. She told me that they called it loader, because they just
really didn't
have a good idea of what it was going to be at the time.
Lab #1: Implement a two-pass linker. The specific assignment is detailed on the class home page.
Homework: Read Chapter 1 (Introduction)
Software (and hardware, but that is not this course) is often implemented in layers. The higher layers use the facilities provided by lower layers.
Alternatively said, the upper layers are written using a more powerful and more abstract virtual machine than the lower layers.
In other words, each layer is written as though it runs on the virtual machine supplied by the lower layers and in turn provides a more abstract (pleasant) virtual machine for the higher layers to run on.
Using a broad brush, the layers are.
An important distinction is that the kernel runs in privileged/kernel/supervisor mode); whereas compilers, editors, shell, linkers. browsersetc run in user mode.
The kernel itself is itself normally layered, e.g.
The machine independent I/O part is written assuming virtual
(i.e. idealized) hardware
.
For example, the machine independent I/O portion simply reads a
block from a disk
.
But in reality one must deal with the specific disk controller.
Often the machine independent part is more than one layer.
The term OS is not well defined. Is it just the kernel? How about the libraries? The utilities? All these are certainly system software but it is not clear how much is part of the OS.
As mentioned above, the OS raises the abstraction level by providing a higher level virtual machine. A second related key objective for the OS is to manage the resources provided by this virtual machine.
The kernel itself raises the level of abstraction and hides details. For example a user (of the kernel) can write to a file (a concept not present in hardware) and ignore whether the file resides on a floppy, a CD-ROM, or a hard disk. The user can also ignore issues such as whether the file is stored contiguously or is broken into blocks.
Well designed abstractions are a key to managing complexity.
The kernel must manage the resources to resolve conflicts between users. Note that when we say users, we are not referring directly to humans, but instead to processes running (typically on behalf of humans).
Typically the resource is shared or multiplexed between the users. This can take the form of time-multiplexing, where the users take turns (e.g., the processor resource) or space-multiplexing, where each user gets a part of the resource (e.g., memory).
With sharing comes various issues such as protection, privacy, fairness, etc.
Answer: Concurrency! Per Brinch Hansen in Operating Systems Principles (Prentice Hall, 1973) writes.
The main difficulty of multiprogramming is that concurrent activities can interact in a time-dependent manner, which makes it practically impossibly to locate programming errors by systematic testing. Perhaps, more than anything else, this explains the difficulty of making operating systems reliable.
Homework: 1. (unless otherwise stated, problems numbers are from the end of the current chapter in Tanenbaum.)
The subsection heading describe the hardware as well as the OS; we are naturally more interested in the latter. These two development paths are related as the improving hardware enabled the more advanced OS features.
One user (program; perhaps several humans) at a time. Although this time frame predates my own usage, computers without serious operating systems existed during the second generation and were now available to a wider (but still very select) audience.
I have fond memories of the Bendix G-15 (paper tape) and the IBM 1620 (cards; typewriter; decimal). During the short time you had the machine, it was truly a personal computer.
Many jobs were batched together, but the systems were still uniprogrammed, a job once started was run to completion without interruption and then flushed from the system.
A change from the previous generation is that the OS was not reloaded for each job and hence needed to be protected from the user's execution. Previously, the beginning of your job contained the trivial OS-like support features.
The batches of user jobs were prepared offline (cards to tape) using a separate computer (an IBM 1401 with a 1402 reader/punch). The tape was brought to the main computer (an IBM 7090/7094) where the output to be printed was written on another tape. This tape went back to the 1401 and was printed on a 1403.
This is the biggest change in my opinion. It is with multiprogramming (multiple users concurrently executing) that we have the operating system fielding requests whose arrival order is non-deterministic (at the pragmatic level). Now operating systems become notoriously hard to get right due to the inability to test a significant percentage of the possible interactions and the inability to reproduce bugs on request.
efficientuser of resources, but is more difficult.
holesarise.
spoolingtheir own jobs on a remote terminal. Deciding when to switch and which process to switch to is called scheduling.
Homework: 3.
Remark: I very much recommend reading all of 1.2, not for this course especially, but for general interest. Tanenbaum writes well and is my age so lived through much of the history himself.
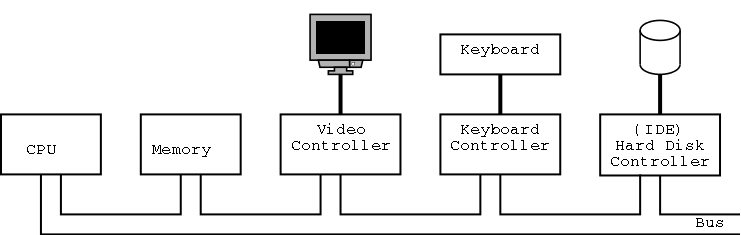
The picture above is very simplified. (For one thing, today separate buses are used to Memory and Video.)
A bus is a set of wires that connect two or more devices.
Only one message can be on the bus at a time.
All the devices receive
the message:
There are no switches in between to steer the message to the desired
destination, but often some of the wires form an address that
indicates which devices should actually process the message.
Only at a few points will we get into sufficient detail to need to understand the various processor registers such as program counters, stack pointers, and Program Status Words (PSWs). We will ignore computer design issues such as pipelining and superscalar.
We do, however, need the notion of a trap, that is an instruction that atomically switches the processor into privileged mode and jumps to a pre-defined physical address. We will have much more to say about traps later in the course.
Many of the OS issues introduced by muti-processors of any flavor are also found in a uni-processor multi-programmed system. In particular successfully handling the concurrency offered by the second class of systems, goes a long way toward preparing for the first class. The remaining multi-processor issues are not covered in this course.
We will ignore caches, but will (later) discuss demand paging, which is very similar (although demand paging and caches use completely disjoint terminology). In both cases, the goal is to combine large slow memory with small fast memory to achieve the effect of large fast memory. We cover caches in our computer design (aka architecture) courses (you can access my class notes off my home page).
The central memory in a system is called RAM (Random Access Memory). A key point is that it is volatile, i.e. the memory loses its data if power is turned off.
ROM (Read Only Memory) is used to hold software that often comes with devices (low-level control) on general purpose computers and for the entire software system on non-user-programmable devices such as microwaves and wristwatches. It is also used for non-changing data. A modern, familiar ROM is CD-ROM (or the denser DVD). ROM is non-volatile.
But often this unchangable data needs to be changed (e.g., to fix bugs). This gives rise first to PROM (Programmable ROM), which, like a CD-R, can be written once (as opposed to being mass produced already written like a CD-ROM), and then to EPROM (Erasable PROM), which is like a CD-RW. An EPROM is especially convenient if it can be erased with a normal circuit (EEPROM, Electrically EPROM or Flash RAM).
As mentioned above when discussing OS/MFT and OS/MVT, multiprogramming requires that we protect one process from another. That is we need to translate the virtual addresses of each program into distinct physical addresses. The hardware that performs this translation is called the MMU or Memory Management Unit.
When context switching from one process to another, the translation must change, which can be an expensive operation.
When we do I/O for real, I will show a real disk opened up and illustrate the components
Devices are often quite difficult to manage and a separate computer, called a controller, is used to translate OS commands into what the device requires.
The bottom of the memory hierarchy, tapes have huge capacities, tiny cost per byte, and very long access times.
In addition to the disks and tapes just mentioned, I/O devices include monitors (really, graphics controllers), NICs (Network Interface Controllers), Modems, Keyboards, Mice, etc.
The OS communicates with the device controller, not with the device itself. For each different controller, a corresponding device driver is included in the OS. Note that, for example, many graphics controllers are capable of controlling a standard monitor, and hence the OS needs many graphics device drivers.
In theory any SCSI (Small Computer System Interconnect) controller can control any SCSI disk. In practice this is not true as SCSI gets inproved to wide scsi, ultra scsi, etc. The newer controllers can still control the older disks and often the newer disks can run in degraded mode with an older controller.
We discuss these alternatives more in chapter 5. In particular, we explain the last point about halving bus accesses.
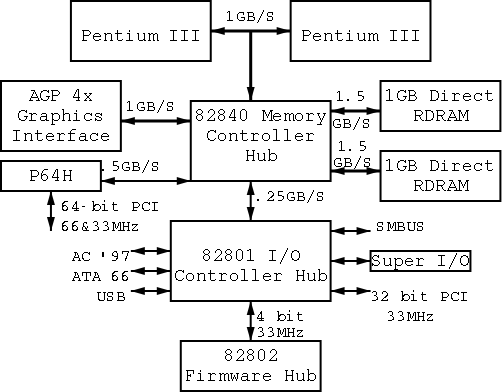
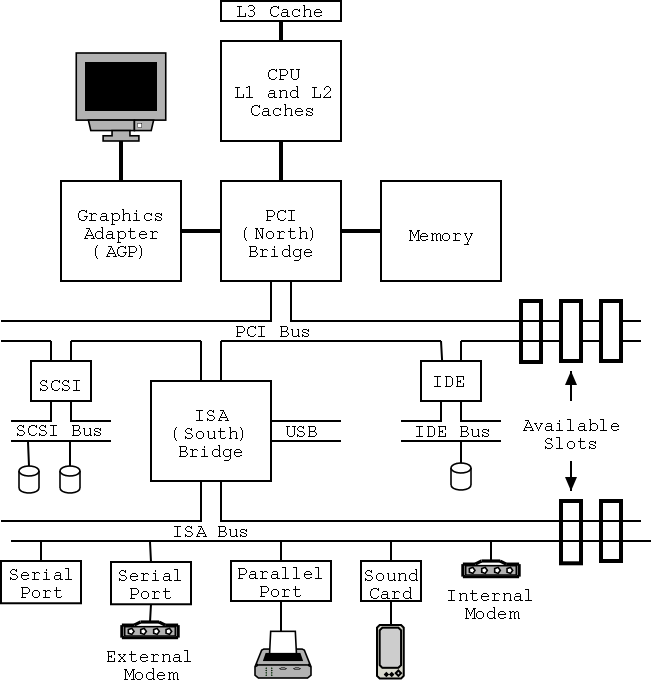
On the right is a figure showing the specifications for an Intel chip set introduced in 2000. Many different names are used, e.g., hubs are often called bridges. Most likely because of their location on the diagram to the right, the Memory Controller Hub is called the Northbridge and the I/O Controller Hub is called the Southbridge.
As shown on the right the chip set has two different width PCI buses. The figure below, which includes some devices themselves, does not show the two different PCI buses. This particular chip set supplies USB, but others do not. In the latter case, a PCI USB controller may be used.
The use of ISA (Industry Standard Architecture) is decreasing but is still found on most southbridges.
Note that the diagram below, which is close to figure 1-12 of the 3e differs from the figure to the right in at least two respects. The connection between the bridges is a proprietary bus and the PCI bus is generated by the Northbridge. The figure on the right is definitely correct for the specific chip set described and is very similar to the Wikipedia article.
Remark: Just today (23 jan 08) I received an email reply from tanenbaum. He will try to fix the diagram in the book in the next printing.
When the power button is pressed control starts at the BIOS a
(typically flash) ROM in the system.
Control is then passed to (the tiny program stored in) the MBR
(Master Boot Record), which is the first 512-byte block on the
primary
disk.
Control then proceeds to the first block in the active
partition and from there the OS (actually the OS loader first) is
finally invoked.
The above assume that the boot medium selected by the bios was the hard disk. Other possibilities include: floppy, CD-ROM, NIC.
There is not as much difference between mainframe, server, multiprocessor, and PC OS's as 2e suggested. Indeed 3e has softened the differences considerably. For example Unix/Linux and Windows runs on all of them.
This course covers these four classes (or one class).
Used in data centers, these systems ofter tremendous I/O capabilities and extensive fault tolerance.
Perhaps the most important servers today are web servers. Again I/O (and network) performance are critical.
A multiprocessor (as opposed to a multi-computer or multiple computers or computer network or grid) means multiple processors sharing memory and controlled by a single instance of the OS, which typically can run on any of the processors. Often it can run on several simultaneously.
These existed almost from the beginning of the computer age, but now are not exotic. Indeed even my laptop is a multiprocessor.
The operating system(s) controlling a system of multiple computers often are classified as either a Network OS, which is basically a collection of ordinary PCs on a LAN that use the network facilities available on PC operating systems. Some extra utilities are often present to ease running jobs on other processors.
A more sophisticated Distributed OS is a
more seamless
version of the above where the boundaries
between the processors are made nearly invisible to users (except
for performance).
This subject is not part of our course (but often is covered G22.2251).
In the recent past some OS systems (e.g., ME) were claimed to be tailored to client operation. Others felt that they were restricted to client operation. This seems to be gone now; a modern PC OS is fully functional. I guess for marketing reasons some of the functionality can be disabled.
This includes PDAs and phones, which are rapidly merging.
The only real difference between this class and the above is the
restriction to very modest memory.
However, very modest
keeps getting bigger and some phones now
include a stripped-down linux.
The OS is part of
the device, e.g., microwave ovens,
and cardiac monitors.
The OS is on a ROM so is not changed.
Since no user code is run, protection is not as important. In that respect the OS is similar to the very earliest computers.
Embedded systems that also contain sensors and communication devices so that the systems in an area can cooperate.
As the name suggests, time (more accurately timeliness) is an important consideration. There are two classes: Soft vs hard real time. In the latter missing a deadline is a fatal error—sometimes literally.
Very limited in power (both meanings of the word).
This will be very brief.
Much of the rest of the course will consist of filling in the
details
.
A process is program in execution. If you run the same program twice, you have created two processes. For example if you have two editors running in two windows, each instance of the editor is a separate process.
Often one distinguishes the state or context of a process—its
address space (roughly its memory image), open files), etc.—
from the thread of control.
If one has many threads running in the same task,
the result is a multithreaded processes
.
The OS keeps information about all processes in the process table. Indeed, the OS views the process as the entry. This is an example of an active entity being viewed as a data structure (cf. discrete event simulations). An observation made by Finkel in his (out of print) OS textbook.
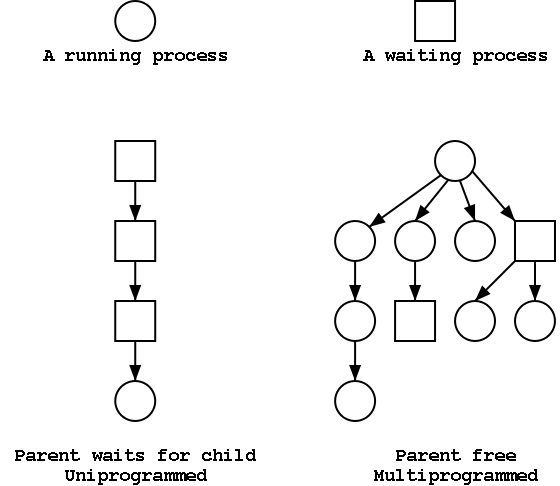
The set of processes forms a tree via the fork system call.
The forker is the parent of the forkee, which is
called a child.
If the system blocks the parent until the child finishes, the
tree
is quite simple, just a line.
But the parent (in many OSes) is free to continue executing and in
particular is free to fork again producing another child.
A process can send a signal to another process to
cause the latter to execute a predefined function (the signal
handler).
This can be tricky to program since the programmer does not know
when in his main
program the signal handler will be
invoked.
Each user is assigned a User IDentification (UID) and all processes created by that user have this UID. A child has the same UID as its parent. It is sometimes possible to change the UID of a running process. A group of users can be formed and given a Group IDentification, GID. One UID is special (the superuser or administrator) and has extra privileges.
Access to files and devices can be limited to a given UID or GID.
A set of processes is deadlocked if each of the processes is blocked by a process in the set. The automotive equivalent, shown below, is called gridlock. (The photograph was sent to me by Laurent Laor.)

Clearly, each process requires memory, but there are other issues as well. For example your linker produces a load module that assumes the process is loaded at location 0. The result would be that every load module has the same address space. The operating system must ensure that the address spaces of concurrently executing processes are assigned disjoint real memory.
For another example note that current operating systems permit each process to be given more (virtual) memory than the total amount of (real) memory on the machine.
Modern systems have a hierarchy of files. A file system tree.
My Computeris the parent of a:\ and c:\.
You can name a file via an absolute path starting at the root directory or via a relative path starting at the current working directory.
In Unix, one file system can be mounted on (attached to) another. When this is done an existing directory on the second filesystem is temporarily replaced by the entire second file system. Most often the directory chosen is empty before the mount so no files become temporarily invisible.
In addition to regular files and directories, Unix also uses the file system namespace for devices (called special files, which are typically found in the /dev directory. Often utilities that are normally applied to (ordinary) files can be applied as well to some special files. For example, when you are accessing a unix system using a mouse and do not have anything serious going on (e.g., right after you log in), type the following command
cat /dev/mouse
and then move the mouse.
You kill the cat by typing cntl-C.
I tried this on my linux box and no damage occurred.
Your mileage may vary.
Before a file can be accessed, it must be opened and a file descriptor obtained. Subsequent I/O system calls (e.g., read and write) use the file descriptor rather that the file name. This is an optimization that enables the OS to find the file once and save the information in a file table accessed by the file descriptor. Many systems have standard files that are automatically made available to a process upon startup. These (initial) file descriptors are fixed.
A convenience offered by some command interpreters is a pipe or pipeline. The pipeline
dir | wc
which pipes the output of dir into a character/word/line counter,
will give the number of files in the directory (plus other info).
There are a wide variety of I/O devices that the OS must manage. For example, if two processes are printing at the same time, the OS must not interleave the output.
The OS contains device specific code (drivers) for each device as well as device-independent I/O code.
Files and directories have associated permissions.
attributesas well. For example the linux ext2 and ext3 file systems support a
dattribute that is a hint to the dump program not to backup this file.
Security has of course sadly become a very serious concern. The topic is quite deep and I do not feel that the necessarily superficial coverage that time would permit is useful so we are not covering the topic at all.
The command line interface to the operating system. The shell permits the user to
ls | wc).
Instead of a shell one can have a more graphical interface.
Homework: 7.
Some concepts become obsolete and then reemerge due in both cases to technology changes. Several examples follow. Perhaps the cycle will repeat with smart card OS.
The use of assembly languages greatly decreases when memories get larger. When minicomputers and microcomputers (early PCs) were first introduced, they each had small memories and for a while assembly language again became popular.
Multiprogramming requires protection hardware. Once the hardware becomes available monoprogramming becomes obsolete. Again when minicomputers and microcomputers were introduced, they had no such hardware so monoprogramming revived.
When disks are small, they hold few files and a flat (single directory) file system is adequate. Once disks get large a hierarchical file system is necessary. When mini and microcomputer were introduced, they had tiny disks and the corresponding file systems were flat.
Virtual memory, among other advantages, permits dynamically linked libraries so as VM hardware appears so does dynamic linking.