Operating Systems
================ Start Lecture #8 ================
4.2: Swapping
Moving the entire processes between disk and memory is called
swapping.
Multiprogramming with Variable Partitions
 Both the number and size of the partitions change with
time.
Both the number and size of the partitions change with
time.
-
IBM OS/MVT (multiprogramming with a varying number of tasks).
-
Also early PDP-10 OS.
-
Job still has only one segment (as with MFT). That is, the
virtual address space is contiguous.
-
The physical address is also contiguous, that is, the process is
stored as one piece in memory.
-
The job can be of any
size up to the size of the machine and the job size can change
with time.
-
A single ready list.
-
A job can move (might be swapped back in a different place).
-
This is dynamic address translation (during run time).
-
Must perform an addition on every memory reference (i.e. on every
address translation) to add the start address of the partition.
-
Called a DAT (dynamic address translation) box by IBM.
-
Eliminates internal fragmentation.
-
Find a region the exact right size (leave a hole for the
remainder).
-
Not quite true, can't get a piece with 10A755 bytes. Would
get say 10A760. But internal fragmentation is much
reduced compared to MFT. Indeed, we say that internal
fragmentation has been eliminated.
-
Introduces external fragmentation, i.e., holes
outside any region of memory assigned to a process.
-
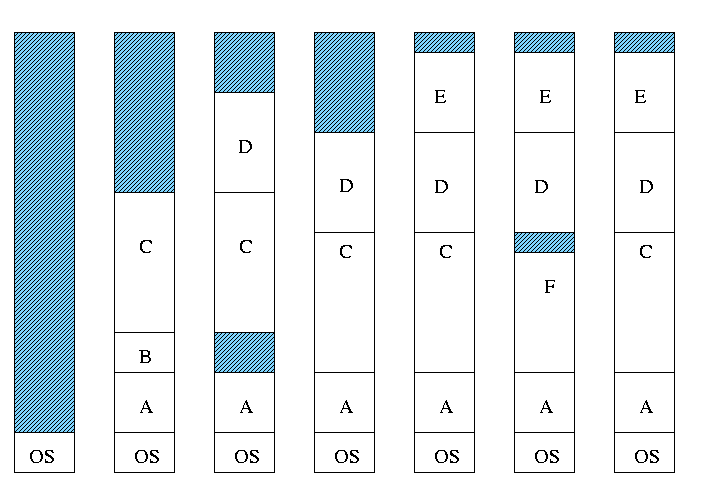
What do you do if no hole is big enough for the request?
- Can compactify
-
Transition from bar 3 to bar 4 in diagram below.
-
This is expensive.
-
Not suitable for real time (MIT ping pong).
- Can swap out one process to bring in another, e.g., bars 5-6
and 6-7 in the diagram.
- There are more processes than holes. Why?
-
Because next to a process there might be a process or a hole
but next to a hole there must be a process
-
So can have “runs” of processes but not of holes
-
If after a process one is equally likely to have a process or
a hole, you get about twice as many processes as holes.
- Base and limit registers are used.
-
Storage keys not good since compactifying or moving would require
changing many keys.
-
Storage keys might need a fine granularity to permit the
boundaries to move by small amounts (to reduce internal
fragmentation). Hence many keys would need to be changed.
Homework: 3
MVT Introduces the “Placement Question”
That is, which hole (partition) should one choose?
-
Best fit, worst fit, first fit, circular first fit, quick fit, Buddy
-
Best fit doesn't waste big holes, but does leave slivers and
is expensive to run.
-
Worst fit avoids slivers, but eliminates all big holes so a
big job will require compaction. Even more expensive than best
fit (best fit stops if it finds a perfect fit).
-
Quick fit keeps lists of some common sizes (but has other
problems, see Tanenbaum).
-
Buddy system
-
Round request to next highest power of two (causes
internal fragmentation).
-
Look in list of blocks this size (as with quick fit).
-
If list empty, go higher and split into buddies.
-
When returning coalesce with buddy.
-
Do splitting and coalescing recursively, i.e. keep
coalescing until can't and keep splitting until successful.
-
See Tanenbaum for more details (or an algorithms book).
- A current favorite is circular first fit, also known as next fit.
-
Use the first hole that is big enough (first fit) but start
looking where you left off last time.
-
Doesn't waste time constantly trying to use small holes that
have failed before, but does tend to use many of the big holes,
which can be a problem.
- Buddy comes with its own implementation. How about the others?
Homework: 5.
4.2.1: Memory Management with Bitmaps
Divide memory into blocks and associate a bit with each block, used
to indicate if the corresponding block is free or allocated. To find
a chunk of size N blocks need to find N consecutive bits
indicating a free block.
The only design question is how much memory does one bit represent.
-
Big: Serious internal fragmentation.
-
Small: Many bits to store and process.
4.2.2: Memory Management with Linked Lists
-
Each item on list gives the length and starting location of the
corresponding region of memory and says whether it is a Hole or Process.
-
The items on the list are not taken from the memory to be
used by processes.
-
Keep in order of starting address.
-
Merge adjacent holes.
-
Singly linked.
Memory Management using Boundary Tags
-
Use the same memory for list items as for processes.
-
Don't need an entry in linked list for blocks in use, just
the avail blocks are linked.
-
The avail blocks themselves are linked, not a node that points to
an avail block.
-
When a block is returned, we can look at the boundary tag of the
adjacent blocks and see if they are avail.
If so they must be merged with the returned block.
-
For the blocks currently in use, just need a hole/process bit at
each end and the length. Keep this in the block itself.
-
We do not need to traverse the list when returning a block can use
boundary tags to find predecessor.
-
See Knuth, The Art of Computer Programming vol 1.
MVT also introduces the “Replacement Question”
That is, which victim should we swap out?
Note that this is an example of the suspend arc mentioned in process
scheduling.
We will study this question more when we discuss
demand paging in which case
we swap out part of a process.
Considerations in choosing a victim
-
Cannot replace a job that is pinned,
i.e. whose memory is tied down. For example, if Direct Memory
Access (DMA) I/O is scheduled for this process, the job is pinned
until the DMA is complete.
-
Victim selection is a medium term scheduling decision
- A job that has been in a wait state for a long time is a good
candidate.
- Often choose as a victim a job that has been in memory for a long
time.
- Another question is how long should it stay swapped out.
-
For demand paging, where swaping out a page is not as drastic as
swapping out a job, choosing the victim is an important memory
management decision and we shall study several policies,
NOTEs:
-
So far the schemes presented so far have had two properties:
-
Each job is stored contiguously in memory.
That is, the job is
contiguous in physical addresses.
-
Each job cannot use more memory than exists in the system.
That is, the virtual addresses space cannot exceed the
physical address space.
-
Tanenbaum now attacks the second item. I wish to do both and start
with the first.
-
Tanenbaum (and most of the world) uses the term
“paging” to mean what I call demand paging. This is
unfortunate as it mixes together two concepts.
-
Paging (dicing the address space) to solve the placement
problem and essentially eliminate external fragmentation.
-
Demand fetching, to permit the total memory requirements of
all loaded jobs to exceed the size of physical memory.
-
Tanenbaum (and most of the world) uses the term virtual memory as
a synonym for demand paging. Again I consider this unfortunate.
-
Demand paging is a fine term and is quite descriptive.
-
Virtual memory “should” be used in contrast with
physical memory to describe any virtual to physical address
translation.
** (non-demand) Paging
 Simplest scheme to remove the requirement of contiguous physical
memory.
Simplest scheme to remove the requirement of contiguous physical
memory.
-
Chop the program into fixed size pieces called
pages (invisible to the programmer).
- Chop the real memory into fixed size pieces called page
frames or simply frames.
- Size of a page (the page size) = size of a frame (the frame size).
- Sprinkle the pages into the frames.
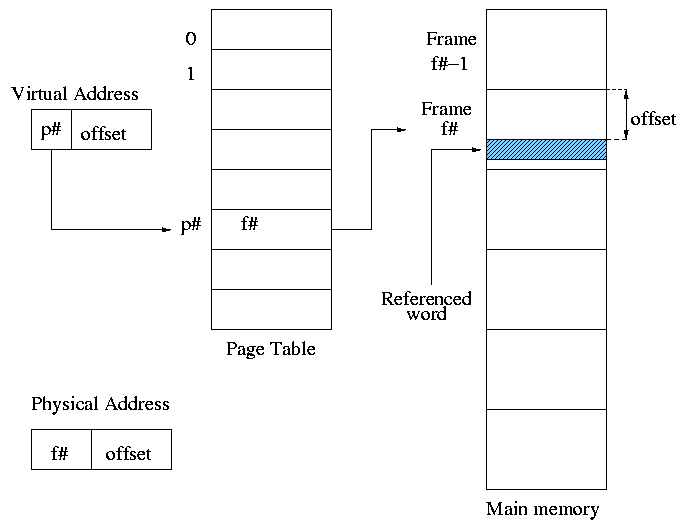
- Keep a table (called the page table) having an
entry for each page. The page table entry or PTE for
page p contains the number of the frame f that contains page p.
Example: Assume a decimal machine with
page size = frame size = 1000.
Assume PTE 3 contains 459.
Then virtual address 3372 corresponds to physical address 459372.
Properties of (non-demand) paging.
-
Entire job must be memory resident to run.
-
No holes, i.e. no external fragmentation.
-
If there are 50 frames available and the page size is 4KB than a
job requiring <= 200KB will fit, even if the available frames are
scattered over memory.
-
Hence (non-demand) paging is useful.
-
Introduces internal fragmentation approximately equal to 1/2 the
page size for every process (really every segment).
-
Can have a job unable to run due to insufficient memory and have
some (but not enough) memory available. This is not
called external fragmentation since it is not due to memory being
fragmented.
-
Eliminates the placement question. All pages are equally
good since don't have external fragmentation.
-
The replacement question remains.
-
Since page boundaries occur at “random” points and can
change from run to run (the page size can change with no effect on
the program--other than performance), pages are not appropriate
units of memory to use for protection and sharing. This is
discussed further when we introduce segmentation.
Homework: 16.
Address translation
-
Each memory reference turns into 2 memory references
- Reference the page table
- Reference central memory
-
This would be a disaster!
-
Hence the MMU caches page#-->frame# translations. This cache is kept
near the processor and can be accessed rapidly.
-
This cache is called a translation lookaside buffer (TLB) or
translation buffer (TB).
-
For the above example, after referencing virtual address 3372,
there would be an entry in the TLB containing the mapping
3-->459.
-
Hence a subsequent access to virtual address 3881 would be
translated to physical address 459881 without an extra memory
reference.
Naturally, a memory reference for location 459881 itself would be
required.
Choice of page size is discuss below.
Homework: 8.
4.3: Virtual Memory (meaning fetch on demand)
Idea is that a program can execute even if only the active portion
of its address space is memory resident. That is, we are to swap in
and swap out
portions of a program. In a crude sense this could be called
“automatic overlays”.
Advantages
-
Can run a program larger than the total physical memory.
-
Can increase the multiprogramming level since the total size of
the active, i.e. loaded, programs (running + ready + blocked) can
exceed the size of the physical memory.
-
Since some portions of a program are rarely if ever used, it is an
inefficient use of memory to have them loaded all the time. Fetch
on demand will not load them if not used and will unload them
during replacement if they are not used for a long time
(hopefully).
-
Simpler for the user than overlays or variable aliasing
(older techniques to run large programs using limited memory).
Disadvantages
-
More complicated for the OS.
-
Execution time less predictable (depends on other jobs).
-
Can over-commit memory.
** 4.3.1: Paging (meaning demand paging)
Fetch pages from disk to memory when they are referenced, with a hope
of getting the most actively used pages in memory.
-
Very common: dominates modern operating systems.
- Started by the Atlas system at Manchester University in
the 60s (Fortheringham).
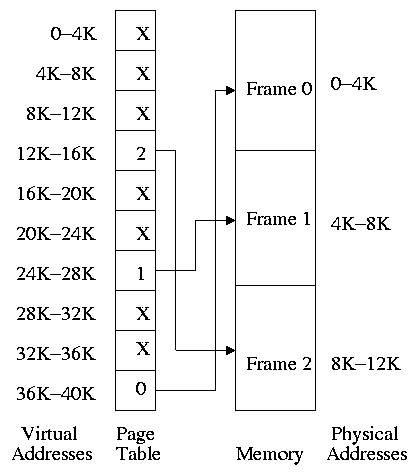
- Each PTE continues to have the frame number if the page is
loaded.
- But what if the page is not loaded (exists only on disk)?
- The PTE has a flag indicating if it is loaded (can think of
the X in the diagram on the right as indicating that this flag is
not set).
- If not loaded, the location on disk could be kept in the PTE,
but normally it is not
(discussed below).
- When a reference is made to a non-loaded page (sometimes
called a non-existent page, but that is a bad name), the system
has a lot of work to do. We give more details
below.
- Choose a free frame, if one exists.
- If not
- Choose a victim frame.
- More later on how to choose a victim.
- Called the replacement question
- Write victim back to disk if dirty,
- Update the victim PTE to show that it is not loaded.
- Copy the referenced page from disk to the free frame.
- Update the PTE of the referenced page to show that it is
loaded and give the frame number.
- Do the standard paging address translation (p#,off)-->(f#,off).
-
Really not done quite this way
-
There is “always” a free frame because ...
-
... there is a deamon active that checks the number of free frames
and if this is too low, chooses victims and “pages them out”
(writing them back to disk if dirty).
-
Choice of page size is discussed below.
Homework: 12.
4.3.2: Page tables
A discussion of page tables is also appropriate for (non-demand)
paging, but the issues are more acute with demand paging since the
tables can be much larger. Why?
-
The total size of the active processes is no longer limited to the
size of physical memory. Since the total size of the processes is
greater, the total size of the page tables is greater and hence
concerns over the size of the page table are more acute.
-
With demand paging an important question is the choice of a victim
page to page out. Data in the page table
can be useful in this choice.
We must be able access to the page table very quickly since it is
needed for every memory access.
Unfortunate laws of hardware.
-
Big and fast are essentially incompatible.
-
Big and fast and low cost is hopeless.
So we can't just say, put the page table in fast processor registers,
and let it be huge, and sell the system for $1000.
The simplest solution is to put the page table in main memory.
However it seems to be both too slow and two big.
-
Seems too slow since all memory references require two reference.
-
This can be largely repaired by using a TLB, which is fast
and, although small, often captures almost all references to
the page table.
-
For this course, officially TLBs “do not exist”,
that is if you are asked to perform a translation, you should
assume there is no TLB.
-
Nonetheless we will discuss them below and in reality they
very much do exist.
-
The page table might be too big.
-
Currently we are considering contiguous virtual
addresses ranges (i.e. the virtual addresses have no holes).
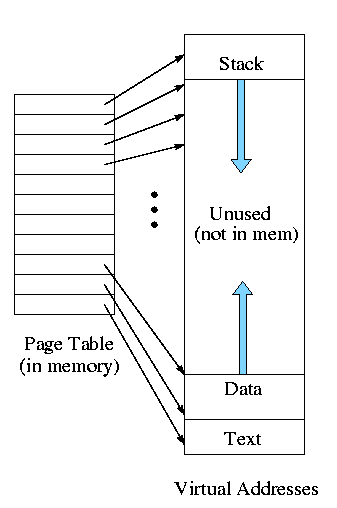
-
Typically put the stack at one end of virtual address and the
global (or static) data at the other end and let them grow towards
each other.
-
The memory in between is unused.
-
This unused virtual memory can be huge (in address range) and
hence the page table will mostly contain unneeded PTEs.
-
Works fine if the maximum virtual address size is small, which
was once true (e.g., the PDP-11 of the 1970s) but is no longer the
case.
-
The “fix” is to use multiple levels of mapping.
We will see two examples below: two-level paging and
segmentation plus paging.
Contents of a PTE
Each page has a corresponding page table entry (PTE).
The information in a PTE is for use by the hardware.
Information set by and used by the OS is normally kept in other OS tables.
The page table format is determined by the hardware so access routines
are not portable.
The following fields are often present.
-
The valid bit. This tells if
the page is currently loaded (i.e., is in a frame). If set, the frame
number is valid.
It is also called the presence or
presence/absence bit. If a page is accessed with the valid
bit unset, a page fault is generated by the hardware.
-
The frame number. This is the main reason for the table. It gives
the virtual to physical address translation.
-
The Modified bit. Indicates that some part of the page
has been written since it was loaded. This is needed if the page is
evicted so that the OS can tell if the page must be written back to
disk.
-
The referenced bit. Indicates that some word in the page
has been referenced. Used to select a victim: unreferenced pages make
good victims by the locality property (discussed below).
-
Protection bits. For example one can mark text pages as
execute only. This requires that boundaries between regions with
different protection are on page boundaries. Normally many
consecutive (in logical address) pages have the same protection so
many page protection bits are redundant.
Protection is more
naturally done with segmentation.