Operating Systems
================ Start Lecture #11 ================
Note:
Should have done this last time
Consider three processes all starting at time 0.
One requires 1ms, the second 100ms, the third 10sec (seconds).
Compute the total/average waiting time for (P)SJF and compare to RR
q=1ms, FCFS, and PS.
Remark:
Recall that SFJ/PSFJ do a good job of minimizing the average waiting
time.
The problem with them is the difficulty in finding the job whose next
CPU burst is minimal.
We now learn two scheduling algorithms that attempt to do this
(approximately).
The first one does this statically, presumably with some manual help;
the second is dynamic and fully automatic.
Multilevel Queues (**, **, MLQ, **)
Put different classes of processs in different queues
-
Processs do not move from one queue to another.
-
Can have different policies on the different queues.
For example, might have a background (batch) queue that is FCFS and one or
more foreground queues that are RR.
-
Must also have a policy among the queues.
For example, might have two queues, foreground and background, and give
the first absolute priority over the second
-
Might apply aging to prevent background starvation.
-
But might not, i.e., no guarantee of service for background
processes. View a background process as a “cycle soaker”.
-
Might have 3 queues, foreground, background, cycle soaker.
Multilevel Feedback Queues (FB, MFQ, MLFBQ, MQ)
As with multilevel queues above we have many queues, but now processs
move from queue to queue in an attempt to
dynamically separate “batch-like” from interactive processs so that
we can favor the latter.
-
Remember that average waiting time is achieved by SJF, and this is
an attempt to determine dynamically those processes that are
interactive, which means have a very short cpu burst.
-
Run processs from the highest priority nonempty queue in a RR manner.
-
When a process uses its full quanta (looks a like batch process),
move it to a lower priority queue.
-
When a process doesn't use a full quanta (looks like an interactive
process), move it to a higher priority queue.
-
A long process with frequent (perhaps spurious) I/O will remain
in the upper queues.
-
Might have the bottom queue FCFS.
-
Many variants.
For example, might let process stay in top queue 1 quantum, next queue 2
quanta, next queue 4 quanta (i.e., sometimes return a process to
the rear of the same queue it was in if the quantum expires).
Theoretical Issues
Considerable theory has been developed.
-
NP completeness results abound.
-
Much work in queuing theory to predict performance.
-
Not covered in this course.
Medium-Term Scheduling
In addition to the short-term scheduling we have discussed, we add
medium-term scheduling in which
decisions are made at a coarser time scale.
-
Called memory scheduling by Tanenbaum (part of three level scheduling).
-
Suspend (swap out) some process if memory is over-committed.
-
Criteria for choosing a victim.
-
How long since previously suspended.
-
How much CPU time used recently.
-
How much memory does it use.
-
External priority (pay more, get swapped out less).
-
We will discuss medium term scheduling again when we study memory
management.
Long Term Scheduling
- “Job scheduling”. Decide when to start jobs, i.e., do not
necessarily start them when submitted.
-
Force user to log out and/or block logins if over-committed.
-
CTSS (an early time sharing system at MIT) did this to insure
decent interactive response time.
-
Unix does this if out of processes (i.e., out of PTEs).
-
“LEM jobs during the day” (Grumman).
-
Called admission scheduling by Tanenbaum (part of three level scheduling).
-
Many supercomputer sites.
2.5.4: Scheduling in Real Time Systems
Skipped
2.5.5: Policy versus Mechanism
Skipped.
2.5.6: Thread Scheduling
Skipped.
Research on Processes and Threads
Skipped.
Chapter 3: Deadlocks
A deadlock occurs when every member of a set of
processes is waiting for an event that can only be caused
by a member of the set.
Often the event waited for is the release of a resource.
In the automotive world deadlocks are called gridlocks.
-
The processes are the cars.
-
The resources are the spaces occupied by the cars
Old Reward: I used to give one point extra credit on the final exam
for anyone who brings a real (e.g., newspaper) picture of an
automotive deadlock. Note that it must really be a gridlock, i.e.,
motion is not possible without breaking the traffic rules. A huge
traffic jam is not sufficient.
This was solved last semester so no reward any more.
One of the winners in on my office door.
For a computer science example consider two processes A and B that
each want to print a file currently on tape.
-
A has obtained ownership of the printer and will release it after
printing one file.
-
B has obtained ownership of the tape drive and will release it after
reading one file.
-
A tries to get ownership of the tape drive, but is told to wait
for B to release it.
-
B tries to get ownership of the printer, but is told to wait for
A to release the printer.
Bingo: deadlock!
3.1: Resources
The resource is the object granted to a process.
3.1.1: Preemptable and Nonpreemptable Resources
-
Resources come in two types
- Preemptable, meaning that the resource can be
taken away from its current owner (and given back later). An
example is memory.
- Non-preemptable, meaning that the resource
cannot be taken away. An example is a printer.
-
The interesting issues arise with non-preemptable resources so
those are the ones we study.
-
Life history of a resource is a sequence of
-
Request
-
Allocate
-
Use
-
Release
-
Processes make requests, use the resource, and release the
resource. The allocate decisions are made by the system and we will
study policies used to make these decisions.
3.1.2: Resource Acquisition
Simple example of the trouble you can get into.
-
Two resources and two processes.
-
Each process wants both resources.
-
Use a semaphore for each. Call them S and T.
-
If both processes execute P(S); P(T); --- V(T); V(S)
all is well.
-
But if one executes instead P(T); P(S); -- V(S); V(T)
disaster! This was the printer/tape example just above.
Recall from the semaphore/critical-section treatment last
chapter, that it is easy to cause trouble if a process dies or stays
forever inside its critical section; we assume processes do not do
this.
Similarly, we assume that no process retains a resource forever.
It may obtain the resource an unbounded number of times (i.e. it can
have a loop forever with a resource request inside), but each time it
gets the resource, it must release it eventually.
3.2: Introduction to Deadlocks
To repeat: A deadlock occurs when a every member of a set of
processes is waiting for an event that can only be caused
by a member of the set.
Often the event waited for is the release of
a resource.
3.2.1: (Necessary) Conditions for Deadlock
The following four conditions (Coffman; Havender) are
necessary but not sufficient for deadlock. Repeat:
They are not sufficient.
-
Mutual exclusion: A resource can be assigned to at most one
process at a time (no sharing).
-
Hold and wait: A processing holding a resource is permitted to
request another.
-
No preemption: A process must release its resources; they cannot
be taken away.
-
Circular wait: There must be a chain of processes such that each
member of the chain is waiting for a resource held by the next member
of the chain.
The first three are characteristics of the system and resources.
That is, for a given system with a fixed set of resources, the first
three conditions are either true or false: They don't change with time.
The truth or falsehood of the last condition does indeed change with
time as the resources are requested/allocated/released.
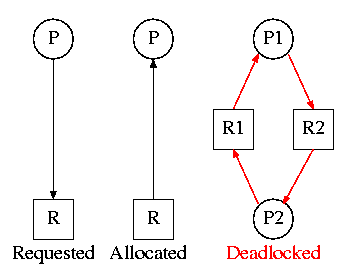
3.2.2: Deadlock Modeling
On the right are several examples of a
Resource Allocation Graph, also called a
Reusable Resource Graph.
-
The processes are circles.
-
The resources are squares.
-
An arc (directed line) from a process P to a resource R signifies
that process P has requested (but not yet been allocated) resource R.
-
An arc from a resource R to a process P indicates that process P
has been allocated resource R.
Homework: 5.
Consider two concurrent processes P1 and P2 whose programs are.
P1: request R1 P2: request R2
request R2 request R1
release R2 release R1
release R1 release R2
On the board draw the resource allocation graph for various possible
executions of the processes, indicating when deadlock occurs and when
deadlock is no longer avoidable.
There are four strategies used for dealing with deadlocks.
-
Ignore the problem
-
Detect deadlocks and recover from them
-
Avoid deadlocks by carefully deciding when to allocate resources.
-
Prevent deadlocks by violating one of the 4 necessary conditions.
3.3: Ignoring the problem--The Ostrich Algorithm
The “put your head in the sand approach”.
-
If the likelihood of a deadlock is sufficiently small and the cost
of avoiding a deadlock is sufficiently high it might be better to
ignore the problem. For example if each PC deadlocks once per 100
years, the one reboot may be less painful that the restrictions needed
to prevent it.
-
Clearly not a good philosophy for nuclear missile launchers.
-
For embedded systems (e.g., missile launchers) the programs run
are fixed in advance so many of the questions Tanenbaum raises (such
as many processes wanting to fork at the same time) don't occur.
3.4: Detecting Deadlocks and Recovering From Them
3.4.1: Detecting Deadlocks with Single Unit Resources
Consider the case in which there is only one
instance of each resource.
-
Thus a request can be satisfied by only one specific resource.
-
In this case the 4 necessary conditions for
deadlock are also sufficient.
-
Remember we are making an assumption (single unit resources) that
is often invalid. For example, many systems have several printers and
a request is given for “a printer” not a specific printer.
Similarly, one can have many tape drives.
-
So the problem comes down to finding a directed cycle in the resource
allocation graph. Why?
Answer: Because the other three conditions are either satisfied by the
system we are studying or are not in which case deadlock is not a
question. That is, conditions 1,2,3 are conditions on the system in
general not on what is happening right now.
To find a directed cycle in a directed graph is not hard. The
algorithm is in the book. The idea is simple.
-
For each node in the graph do a depth first traversal to see if the
graph is a DAG (directed acyclic graph), building a list as you go
down the DAG.
-
If you ever find the same node twice on your list, you have found
a directed cycle, the graph is not a DAG, and deadlock exists among
the processes in your current list.
-
If you never find the same node twice, the graph is a DAG and no
deadlock occurs.
-
The searches are finite since the list size is bounded by the
number of nodes.