================ Start Lecture #4 ================
Remark: A good way to use the material in the addendum is to compare the first case (user-mode f calls user-mode g) to the TRAP/RTI case line by line so that you can see the similarities and differences.
I must note that Tanenbaum is a big advocate of the so called microkernel approach in which as much as possible is moved out of the (supervisor mode) kernel into separate processes. The (hopefully small) portion left in supervisor mode is called a microkernel.
In the early 90s this was popular. Digital Unix (now called True64) and Windows NT/2000/XP are examples. Digital Unix is based on Mach, a research OS from Carnegie Mellon university. Lately, the growing popularity of Linux has called into question the belief that ``all new operating systems will be microkernel based''.
The previous picture: one big program
The system switches from user mode to kernel mode during the poof and then back when the OS does a ``return'' (an RTI or return from interrupt).
But of course we can structure the system better, which brings us to.
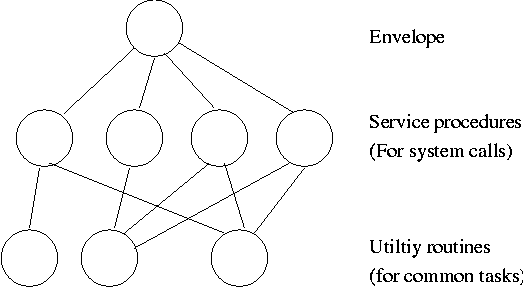
Some systems have more layers and are more strictly structured.
An early layered system was ``THE'' operating system by Dijkstra. The layers were.
The layering was done by convention, i.e. there was no enforcement by hardware and the entire OS is linked together as one program. This is true of many modern OS systems as well (e.g., linux).
The multics system was layered in a more formal manner. The hardware provided several protection layers and the OS used them. That is, arbitrary code could not jump to or access data in a more protected layer.
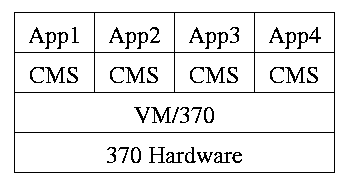
Use a ``hypervisor'' (beyond supervisor, i.e. beyond a normal OS) to switch between multiple Operating Systems. Made popular by IBM's VM/CMS
Similar to VM/CMS but the virtual machines have disjoint resources (e.g., distinct disk blocks) so less remapping is needed.
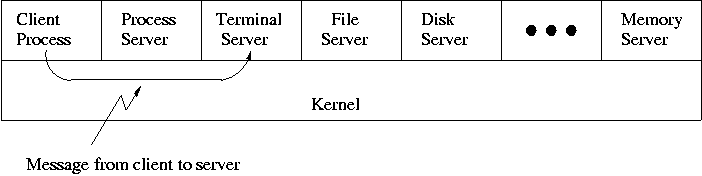
When implemented on one computer, a client server OS uses the microkernel approach in which the microkernel supplies just interprocess communication, and the main OS functions are provided by a number of separate processes.
This does have advantages. For example an error in the file server cannot corrupt memory in the process server. This makes errors easier to track down.
But it does mean that when a (real) user process makes a system call there are more processes switches. These are not free.
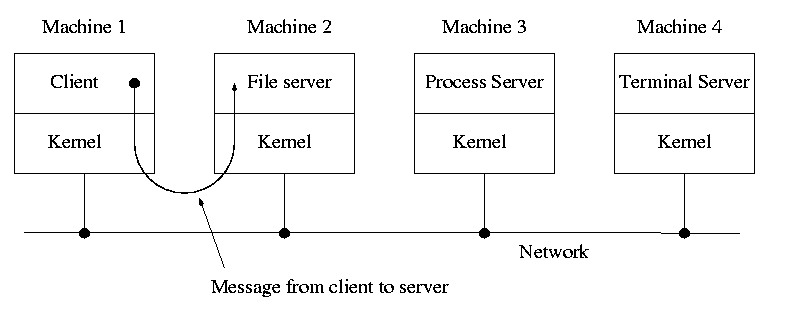
A distributed system can be thought of as an extension of the client server concept where the servers are remote.
Homework: 23
Dennis Ritchie, the inventor of the C programming language and co-inventor, with Ken Thompson, of Unix was interviewed in February 2003. The following is from that interview.
What's your opinion on microkernels vs. monolithic?
Dennis Ritchie: They're not all that different when you actually use them. "Micro" kernels tend to be pretty large these days, and "monolithic" kernels with loadable device drivers are taking up more of the advantages claimed for microkernels.
Tanenbaum's chapter title is ``Processes and Threads''. I prefer to add the word management. The subject matter is processes, threads, scheduling, interrupt handling, and IPC (InterProcess Communication--and Coordination).
Definition: A process is a program in execution.
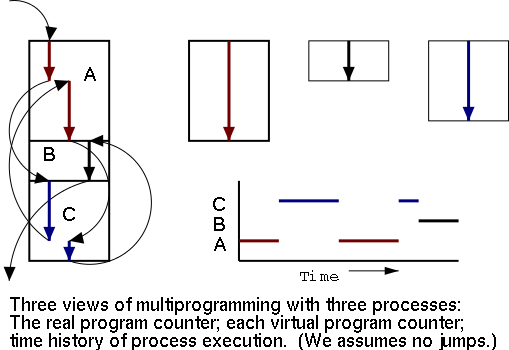
Even though in actuality there are many processes running at once, the OS gives each process the illusion that it is running alone.
Think of the individual modules that are input to the linker. Each numbers its addresses from zero; the linker eventually translates these relative addresses into absolute addresses. That is the linker provides to the assembler a virtual memory in which addresses start at zero.
Virtual time and virtual memory are examples of abstractions provided by the operating system to the user processes so that the latter ``sees'' a more pleasant virtual machine than actually exists.
From the users or external viewpoint there are several mechanisms for creating a process.
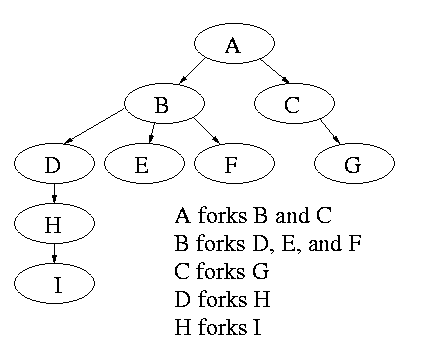
But looked at internally, from the system's viewpoint, the second method dominates. Indeed in unix only one process is created at system initialization (the process is called init); all the others are children of this first process.
Why have init? That is why not have all processes created via
method 2?
Ans: Because without init there would be no running process to create
any others.
Again from the outside there appear to be several termination mechanism.
And again, internally the situation is simpler. In Unix terminology, there are two system calls kill and exit that are used. Kill (poorly named in my view) sends a signal to another process. If this signal is not caught (via the signal system call) the process is terminated. There is also an ``uncatchable'' signal. Exit is used for self termination and can indicate success or failure.
Modern general purpose operating systems permit a user to create and destroy processes.
Old or primitive operating system like
MS-DOS are not multiprogrammed, so when one process starts another,
the first process is automatically blocked and waits until
the second is finished.
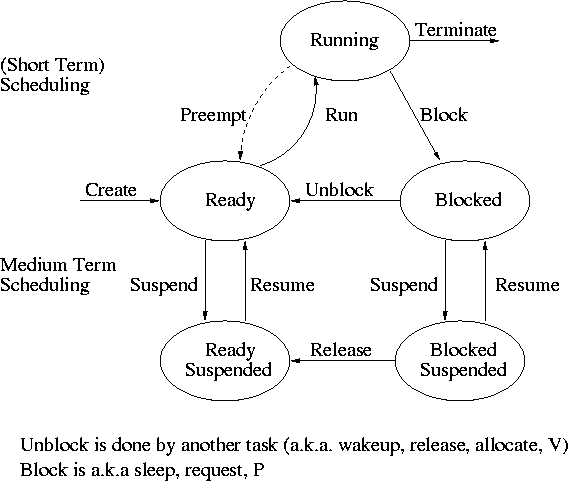
The diagram on the right contains much information.