Operating Systems
================ Start Lecture #6 ================
Chapter 2: Process and Thread Management
Tanenbaum's chapter title is ``Processes and Threads''. I prefer to
add the word
management. The subject matter is processes, threads, scheduling,
interrupt handling, and IPC (InterProcess Communication--and
Coordination).
2.1: Processes
Definition: A process is a program
in execution.
- We are assuming a multiprogramming OS that
can switch from one process to another.
- Sometimes this is
called pseudoparallelism since one has the illusion of a
parallel processor.
- The other possibility is real
parallelism in which two or more processes are actually running
at once because the computer system is a parallel processor, i.e., has
more than one processor.
- We do not study real parallelism (parallel
processing, distributed systems, multiprocessors, etc) in this course.
2.1.1: The Process Model
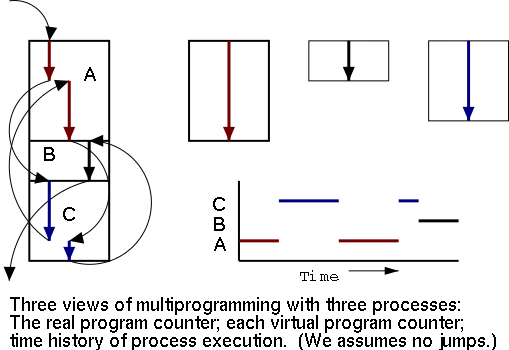
Even though in actuality there are many processes running at once, the
OS gives each process the illusion that it is running alone.
Virtual time and virtual memory are examples of abstractions
provided by the operating system to the user processes so that the
latter ``sees'' a more pleasant virtual machine than actually exists.
2.1.2: Process Creation
From the users or external viewpoint there are several mechanisms
for creating a process.
- System initialization, including daemon processes.
- Execution of a process creation system call by a running process.
- A user request to create a new process.
- Initiation of a batch job.
But looked at internally, from the system's viewpoint, the second
method dominates. Indeed in unix only one process is created at
system initialization (the process is called init); all the
others are children of this first process.
Why have init? That is why not have all processes created via
method 2?
Ans: Because without init there would be no running process to create
any others.
2.1.3: Process Termination
Again from the outside there appear to be several termination
mechanism.
- Normal exit (voluntary).
- Error exit (voluntary).
- Fatal error (involuntary).
- Killed by another process (involuntary).
And again, internally the situation is simpler. In Unix
terminology, there are two system calls kill and
exit that are used. Kill (poorly named in my view) sends a
signal to another process. If this signal is not caught (via the
signal system call) the process is terminated. There
is also an ``uncatchable'' signal. Exit is used for self termination
and can indicate success or failure.
2.1.4: Process Hierarchies
Modern general purpose operating systems permit a user to create and
destroy processes.
- In unix this is done by the fork
system call, which creates a child process, and the
exit system call, which terminates the current
process.
- After a fork both parent and child keep running (indeed they
have the same program text) and each can fork off other
processes.
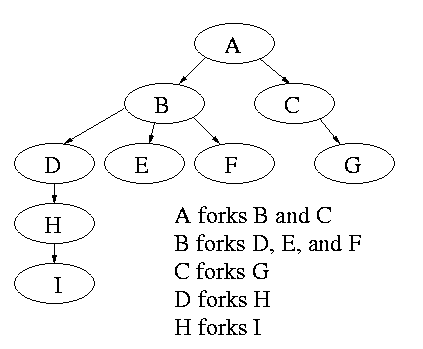
- A process tree results. The root of the tree is a special
process created by the OS during startup.
- A process can choose to wait for children to terminate.
For example, if C issued a wait() system call it would block until G
finished.
Old or primitive operating system like
MS-DOS are not multiprogrammed, so when one process starts another,
the first process is automatically blocked and waits until
the second is finished.
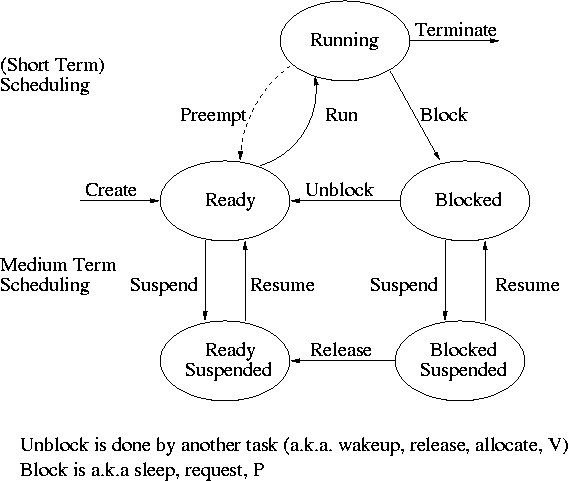
2.1.5: Process States and Transitions
The diagram on the right contains much information.
- Consider a running process P that issues an I/O request
- The process blocks
- At some later point, a disk interrupt occurs and the driver
detects that P's request is satisfied.
- P is unblocked, i.e. is moved from blocked to ready
- At some later time the operating system looks for a ready job
to run and picks P.
- A preemptive scheduler has the dotted line preempt;
A non-preemptive scheduler doesn't.
- The number of processes changes only for two arcs: create and
terminate.
- Suspend and resume are medium term scheduling
- Done on a longer time scale.
- Involves memory management as well.
- Sometimes called two level scheduling.
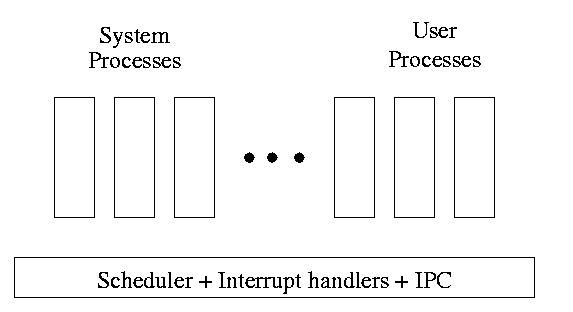
One can organize an OS around the scheduler.
- Write a minimal ``kernel'' consisting of the scheduler, interrupt
handlers, and IPC (interprocess communication).
- The rest of the OS consists of kernel processes (e.g. memory,
filesystem) that act as servers for the user processes (which of
course act as clients.
- The system processes also act as clients (of other system processes).
- The above is called the client-server model and is one Tanenbaum likes.
His ``Minix'' operating system works this way.
- Indeed, there was reason to believe that the client-server model
would dominate OS design.
But that hasn't happened.
- Such an OS is sometimes called server based.
- Systems like traditional unix or linux would then be
called self-service since the user process serves itself.
- That is, the user process switches to kernel mode and performs
the system call.
- To repeat: the same process changes back and forth from/to
user<-->system mode and services itself.
2.1.6: Implementation of Processes
The OS organizes the data about each process in a table naturally
called the process table.
Each entry in this table is called a
process table entry (PTE) or
process control block.
- One entry per process.
- The central data structure for process management.
- A process state transition (e.g., moving from blocked to ready) is
reflected by a change in the value of one or more
fields in the PTE.
- We have converted an active entity (process) into a data structure
(PTE). Finkel calls this the level principle ``an active
entity becomes a data structure when looked at from a lower level''.
- The PTE contains a great deal of information about the process.
For example,
- Saved value of registers when process not running
- Program counter (i.e., the address of the next instruction)
- Stack pointer
- CPU time used
- Process id (PID)
- Process id of parent (PPID)
- User id (uid and euid)
- Group id (gid and egid)
- Pointer to text segment (memory for the program text)
- Pointer to data segment
- Pointer to stack segment
- UMASK (default permissions for new files)
- Current working directory
- Many others
An aside on Interrupts (will be done again
here)
In a well defined location in memory (specified by the hardware) the
OS stores an interrupt vector, which contains the
address of the (first level) interrupt handler.
-
Tanenbaum calls the interrupt handler the interrupt service routine.
-
Actually one can have different priorities of interrupts and the
interrupt vector contains one pointer for each level. This is why it is
called a vector.
Assume a process P is running and a disk interrupt occurs for the
completion of a disk read previously issued by process Q, which is
currently blocked.
Note that disk interrupts are unlikely to be for the currently running
process (because the process that initiated the disk access is likely
blocked).
- The hardware saves the program counter and some other registers
(or switches to using another set of registers, the exact mechanism is
machine dependent).
- Hardware loads new program counter from the interrupt vector.
- Loading the program counter causes a jump.
- Steps 1 and 2 are similar to a procedure call.
But the interrupt is asynchronous.
- As with a trap (poof), the interrupt automatically switches
the system into privileged mode.
- Assembly language routine saves registers.
- Assembly routine sets up new stack.
- These last two steps can be called setting up the C environment.
- Assembly routine calls C procedure (Tanenbaum forgot this one).
- C procedure does the real work.
- Determines what caused the interrupt (in this case a disk
completed an I/O)
- How does it figure out the cause?
- Which priority interrupt was activated.
- The controller can write data in memory before the
interrupt
- The OS can read registers in the controller
- Mark process Q as ready to run.
- That is move Q to the ready list (note that again
we are viewing Q as a data structure).
- The state of Q is now ready (it was blocked before).
- The code that Q needs to run initially is likely to be OS
code. For example, Q probably needs to copy the data just
read from a kernel buffer into user space.
- Now we have at least two processes ready to run: P and Q
- The scheduler decides which process to run (P or Q or
something else). Lets assume that the decision is to run P.
- The C procedure (that did the real work in the interrupt
processing) continues and returns to the assembly code.
- Assembly language restores P's state (e.g., registers) and starts
P at the point it was when the interrupt occurred.
2.2: Threads
| Per process items | Per thread items
|
|---|
| Address space | Program counter
|
| Global variables | Machine registers
|
| Open files | Stack
|
| Child processes
|
| Pending alarms
|
| Signals and signal handlers
|
| Accounting information
|
The idea is to have separate threads of control (hence the name)
running in the same address space.
An address space is a memory management concept.
For now think of an address space as the memory in which a process
runs and the mapping from the virtual addresses (addresses in the
program) to the physical addresses (addresses in the machine).
Each thread is somewhat like a
process (e.g., it is scheduled to run) but contains less state
(e.g., the address space belongs to the process in which the thread runs.
2.2.1: The Thread Model
A process contains a number of resources such as address space,
open files, accounting information, etc. In addition to these
resources, a process has a thread of control, e.g., program counter,
register contents, stack. The idea of threads is to permit multiple
threads of control to execute within one process. This is often
called multithreading and threads are often called
lightweight processes. Because threads in the same
process share so much state, switching between them is much less
expensive than switching between separate processes.
Individual threads within the same process are not completely
independent. For example there is no memory protection between them.
This is typically not a security problem as the threads are
cooperating and all are from the same user (indeed the same process).
However, the shared resources do make debugging harder. For example
one thread can easily overwrite data needed by another and if one thread
closes a file other threads can't read from it.
2.2.2: Thread Usage
Often, when a process A is blocked (say for I/O) there is still
computation that can be done. Another process B can't do this
computation since it doesn't have access to the A's memory. But two
threads in the same process do share memory so there is no problem.
An important modern example is a multithreaded web server. Each thread is
responding to a single WWW connection. While one thread is blocked on
I/O, another thread can be processing another WWW connection. Why not
use separate processes, i.e., what is the shared memory?
Ans: The cache of frequently referenced pages.
A common organization is to have a dispatcher thread that fields
requests and then passes this request on to an idle thread.
Another example is a producer-consumer problem
(c.f. below)
in which we have 3 threads in a pipeline.
One reads data, the second processes the data read, and the third
outputs the processed data. Again, while one thread is blocked the
others can execute.
Homework: 9.
2.2.3: Implementing threads in user space
Write a (threads) library that acts as a mini-scheduler and
implements thread_create, thread_exit,
thread_wait, thread_yield, etc. The central data
structure maintained and used by this library is the thread
table, the analogue of the process table in the operating system
itself.
Advantages
- Requires no OS modification.
- Very fast since no context switching.
- Can customize the scheduler for each application.
Disadvantages
- Re-doing the effort of writing a scheduler.
- Blocking system calls can't be executed directly since that would block
the entire process.
- Similarly a page fault would block the entire process.
- A thread with infinite loop prevents all other threads in this
process from running.
2.2.4: Implementing Threads in the Kernel
Move the thread operations into the operating system itself. This
naturally requires that the operating system itself be (significantly)
modified and is thus not a trivial undertaking.
- Thread-create and friends are now system calls and hence much
slower than with user-mode threads.
They are, however, still much faster than creating/switching/etc
processes since there is so much shared state that does not need
to be recreated.
- During this past summer (2002), Ingo Molnar has been speeding
up the linux kernel thread performance with the goal that a pure kernel
level thread system will achieve (nearly) the speed of a user mode
system.
Benchmarking has begun; results should be available in a few months.
- A thread that blocks causes no particular problem. The kernel can
run another thread from this process or can run another process.
- Similarly a page fault, or infinite loop in one thread does not
automatically block the other threads in the process.
2.2.5: Hybrid Implementations
One can write a (user-level) thread library even if the kernel also
has threads. This is sometimes called the M:N model since M user mode threads
run on each of N kernel threads.
Then each kernel thread can switch between user level
threads. Thus switching between user-level threads within one kernel
thread is very fast (no context switch) and we maintain the advantage
that a blocking system call or page fault does not block the entire
multi-threaded application.
2.2.6: Scheduler Activations
Skipped
2.2.7: Popup Threads
The idea is to automatically issue a create thread system call upon
message arrival. (The alternative is to have a thread or process
blocked on a receive system call.)
If implemented well the latency between message arrival and thread
execution can be very small since the new thread does not have state
to restore.
Making Single-threaded Code Multithreaded
Definitely NOT for the faint of heart.
- There often is state that should not be shared. A well-cite
example is the unix errno variable that contains the error
number (zero means no error) of the error encountered by the last
system call. Errno is hardly elegant (even in normal,
single-threaded, applications), but its use is widespread.
If multiple threads issue faulty system calls the errno value of the
second overwrites the first and thus the first errno value may be lost.
- Much existing code, including many libraries, are not
re-entrant.
- What should be done with a signal sent to a process. Does it go
to all or one thread?
- How should stack growth be managed. Normally the kernel grows the
(single) stack automatically when needed. What if there are
multiple stacks?
2.3: Interprocess Communication (IPC) and Coordination/Synchronization
2.3.1: Race Conditions
A race condition occurs when two processes can
interact and the outcome depends on the order in which the processes
execute.
Imagine two processes both accessing x, which is initially 10.
- One process is to execute x <-- x+1
- The other is to execute x <-- x-1
- When both are finished x should be 10
- But we might get 9 and might get 11!
- Show how this can happen (x <-- x+1 is not atomic)
- Tanenbaum shows how this can lead to disaster for a printer
spooler
Homework: 18.