================ Start Lecture #12
================
** General (not necessarily demand) Segmentation
- Permits fine grained sharing and protection. For a simple example
can share the text segment in early unix.
- Visible division of program.
- Variable size segments.
- Virtual Address = (seg#, offset).
- Does not mandate how stored in memory.
- One possibility is that the entire program must be in memory
in order to run it.
Use whole process swapping.
Very early versions of Unix did this.
- Can also implement demand segmentation.
- Can combine with demand paging (done below).
- Requires a segment table with a base and limit value for each
segment. Similar to a page table. Why is there no limit value in a
page table?
Ans: All pages are the same size so the limit is obvious.
- Entries are called STEs, Segment Table Entries.
- (seg#, offset) --> if (offset<limit) base+offset else error.
- Segmentation exhibits external fragmentation, just as whole program
swapping.
Since segments are smaller than programs (several segments make up one
program), the external fragmentation is not as bad.
** Demand Segmentation
Same idea as demand paging applied to segments.
- If a segment is loaded, base and limit are stored in the STE and
the valid bit is set in the PTE.
- The PTE is accessed for each memory reference (not really, TLB).
- If the segment is not loaded, the valid bit is unset.
The base and limit as well as the disk
address of the segment is stored in the an OS table.
- A reference to a non-loaded segment generate a segment fault
(analogous to page fault).
- To load a segment, we must solve both the placement question and the
replacement question (for demand paging, there is no placement question).
- I believe demand segmentation was once implemented by Burroughs,
but am not sure.
It is not used in modern systems.
The following table mostly from Tanenbaum compares demand
paging with demand segmentation.
| Consideration |
Demand
Paging | Demand
Segmentation |
|---|
| Programmer aware |
No | Yes |
| How many addr spaces |
1 | Many |
| VA size > PA size |
Yes | Yes |
Protect individual
procedures separately |
No | Yes |
Accommodate elements
with changing sizes |
No | Yes |
| Ease user sharing |
No | Yes |
| Why invented |
let the VA size
exceed the PA size |
Sharing, Protection,
independent addr spaces |
|
| Internal fragmentation |
Yes | No, in principle |
| External fragmentation |
No | Yes |
| Placement question |
No | Yes |
| Replacement question |
Yes | Yes |
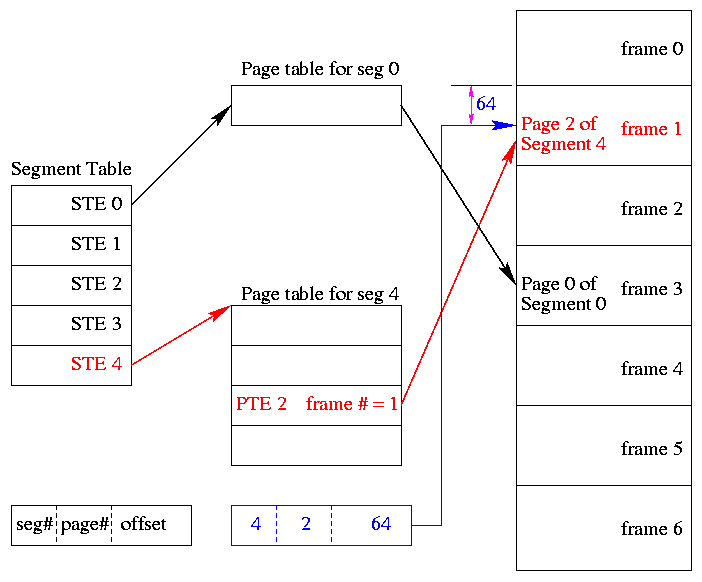
** 4.8.2 and 4.8.3: Segmentation With Paging
(Tanenbaum gives two sections to explain the differences between
Multics and the Intel Pentium. These notes cover what is common to
all segmentation).
Combines both segmentation and paging to get advantages of both at
a cost in complexity. This is very common now.
- A virtual address becomes a triple: (seg#, page#, offset).
- Each segment table entry (STE) points to the page table for that
segment.
Compare this with a
multilevel page table.
- The size of each segment is a multiple of the page size (since the
segment consists of pages). Perhaps not. Can keep the exact size in
the STE (limit value) and shoot the process if it referenced beyond
the limit. In this case the last page of each segment is partially valid.
- The page# field in the address gives the entry in the chosen page
table and the offset gives the offset in the page.
- From the limit field, one can easily compute the size of the
segment in pages (which equals the size of the corresponding page
table in PTEs). Implementations may require the size of a segment to
be a multiple of the page size in which case the STE would store the
number of pages in the segment.
- A straightforward implementation of segmentation with paging
would requires 3 memory references (STE, PTE, referenced word) so a
TLB is crucial.
- Some books carelessly say that segments are of fixed size.
This is wrong.
They are of variable size with a fixed maximum and possibly with the
requirement that the size of a segment is a multiple of the page size.
- The first example of segmentation with paging was Multics.
- Keep protection and sharing information on segments.
This works well for a number of reasons.
- A segment is variable size.
- Segments and their boundaries are user (i.e., linker) visible.
- Segments are shared by sharing their page tables. This
eliminates the problem mentioned above with
shared pages.
- Do replacement on pages so there is no placement question and
no external fragmentation.
- Do fetch-on-demand with pages (i.e., do demand paging).
- In general, segmentation with demand paging works well and is
widely used. The only problems are the complexity and the resulting 3
memory references for each user memory reference. The complexity is
real, but can be managed. The three memory references would be fatal
were it not for TLBs, which considerably ameliorate the problem. TLBs
have high hit rates and for a TLB hit there is essentially no penalty.
Homework: 38.
4.9: Research on Memory Management
Skipped
4.10: Summary
Read
Some Last Words on Memory Management
- Segmentation / Paging / Demand Loading (fetch-on-demand)
- Each is a yes or no alternative.
- Gives 8 possibilities.
- Placement and Replacement.
- Internal and External Fragmentation.
- Page Size and locality of reference.
- Multiprogramming level and medium term scheduling.
Chapter 5: Input/Output
5.1: Principles of I/O Hardware
5.1.1: I/O Devices
- Not much to say. Devices are varied.
- Block versus character devices:
- Devices, such as disks and CDROMs, with addressable chunks
(sectors in this case) are called block
devices,
These devices support seeking.
- Devices, such as Ethernet and modem connections, that are a
stream of characters are called character
devices.
These devices do not support seeking.
- Some cases, like tapes, are not so clear.
5.1.2: Device Controllers
These are the ``devices'' as far as the OS is concerned. That
is, the OS code is written with the controller spec in hand not with
the device spec.
- Also called adaptors.
- The controller abstracts away some of the low level features of
the device.
- For disks, the controller does error checking and buffering.
- (Unofficial) In the old days it handled interleaving of sectors.
(Sectors are interleaved if the
controller or CPU cannot handle the data rate and would otherwise have
to wait a full revolution. This is not a concern with modern systems
since the electronics have increased in speed faster than the
devices.)
- For analog monitors (CRTs) the controller does
a great deal. Analog video is far from a bunch of ones and
zeros.
- Controllers are also called adaptors.
5.1.3: Memory-Mapped I/O
Think of a disk controller and a read request. The goal is to copy
data from the disk to some portion of the central memory. How do we
do this?
- The controller contains a microprocessor and memory and is
connected to the disk (by a cable).
- When the controller asks the disk to read a sector, the contents
come to the controller via the cable and are stored by the controller
in its memory.
- The question is how does the OS, which is running on another
processor, let the controller know that a disk read is desired and how
is the data eventually moved from the controller's memory to the
general system memory.
- Typically the interface the OS sees consists of some device
registers located on the controller.
- These are memory locations into which the OS writes
information such as sector to access, read vs. write, length,
where in system memory to put the data (for a read) or from where
to take the data (for a write).
- There is also typically a device register that acts as a
``go button''.
- There are also devices registers that the OS reads, such as
status of the controller, errors found, etc.
- So now the question is how does the OS read and write the device
register
- With Memory-mapped I/O the device registers
appear as normal memory. All that is needed is to know at which
address each device regester appears. Then the OS uses normal
load and store instructions to write the registers.
- Some systems instead have a special ``I/O space'' into which
the registers are mapped and require the use of special I/O space
instructions to accomplish the load and store. From a conceptual
point of view there is no difference between the two models.
5.1.4: Direct Memory Access (DMA)
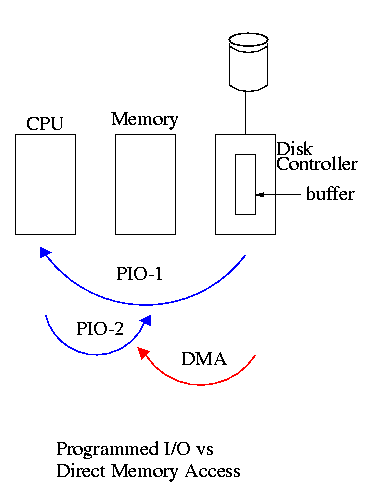
- With or without DMA, the disk controller pulls the desired data
from the disk to its buffer (and pushes data from the buffer to the
disk).
- Without DMA, i.e., with programmed I/O (PIO), the
cpu then does loads and stores (or I/O instructions) to copy the data
from the buffer to the desired memory location.
- With a DMA controller, the controller writes the memory without
intervention of the CPU.
- Clearly DMA saves CPU work. But this might not be important if
the CPU is limited by the memory or by system buses.
- Very important is that there is less data movement so the buses
are used less and the entire operation takes less time.
- Since PIO is pure software it is easier to change, which is an
advantage.
- DMA does need a number of bus transfers from the CPU to the
controller to specify the DMA. So DMA is most effective for large
transfers where the setup is amortized.
- Why have the buffer? Why not just go from the disk straight to
the memory.
Answer: Speed matching. The disk supplies data at a fixed rate, which might
exceed the rate the memory can accept it. In particular the memory
might be busy servicing a request from the processor or from another
DMA controller.
Homework: 12
5.1.5: Interrupts Revisited
Skipped.
5.2: Principles of I/O Software
As with any large software system, good design and layering is
important.
5.2.1: Goals of the I/O Software
Device independence
We want to have most of the OS, unaware of the characteristics of
the specific devices attached to the system. Indeed we also want the
OS to be largely unaware of the CPU type itself.
Due to this device independence, programs are
written to read and write generic devices and then at run time
specific devices are assigned. Writing to a disk has differences from
writing to a terminal, but Unix cp and DOS copy do not see these
differences. Indeed, most of the OS, including the file system code,
is unaware of whether the device is a floppy or hard disk.
Homework: 5.9
Uniform naming
Recall that we discussed the value
of the name space implemented by file systems. There is no dependence
between the name of the file and the device on which it is stored. So
a file called IAmStoredOnAHardDisk might well be stored on a floppy disk.
Error handling
There are several aspects to error handling including: detection,
correction (if possible) and reporting.
- Detection should be done as close to where the error occurred as
possible before more damage is done (fault containment). This is not
trivial.
- Correction is sometimes easy, for example ECC memory does this
automatically (but the OS wants to know about the error so that it can
schedule replacement of the faulty chips before unrecoverable double
errors occur).
Other easy cases include successful retries for failed ethernet
transmissions. In this example, while logging is appropriate, it is
quite reasonable for no action to be taken.
- Error reporting tends to be awful. The trouble is that the error
occurs at a low level but by the time it is reported the
context is lost. Unix/Linux in particular is horrible in this area.
Creating the illusion of synchronous I/O
- I/O must be asynchronous for good performance. That is
the OS cannot simply wait for an I/O to complete. Instead, it
proceeds with other activities and responds to the notification when
the I/O has finished.
- Users (mostly) want no part of this. The code sequence
Read X
Y <-- X+1
Print Y
should print a value one greater than that read. But if the
assignment is performed before the read completes, the wrong value is
assigned.
- Performance junkies sometimes do want the asynchrony so that they
can have another portion of their program executed while the I/O is
underway. That is they implement a mini-scheduler in their
application code.
Buffering
- Often needed to hold data for examination prior to sending it to
its desired destination.
- But this involves copying and takes time.
Sharable vs dedicated devices
For devices like printers and tape drives, only one user at a time
is permitted. These are called serially reusable
devices, and are studied next chapter.
Devices like disks and Ethernet ports can be shared by processes
running concurrently.
5.2.2: Programmed I/O
- As mentioned just above, with programmed I/O the
processor moves the data between memory and the device.
- How does the
process know when the device is ready to accept or supply new data?
- In the simplest implementation, the processor loops continually asking
the device. This is called polling or
busy waiting.
- If the device is slow, polling is clearly wasteful, which leads us
to.
5.2.3: Interrupt-Driven I/O
- The device interrupts the processor when it is ready.
- An interrupt service routine then initiates transfer of the next
datum
- Normally better than polling, but not always. Interrupts are
expensive on modern machines.
- To minimize interrupts, better controllers often employ ...
I/O Using DMA
- We discussed DMA above.
- An additional advantage of dma, not mentioned above, is that the
processor is interrupted only at the end of a command not after each
datum is transferred.
- Many devices receive a character at a time, but with a dma
controller, an interrupt occurs only after a buffer has been transferred.
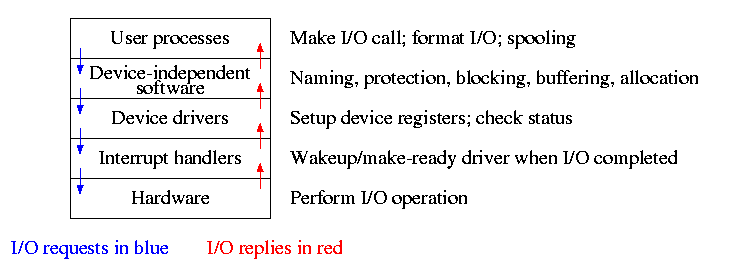
5.3: I/O Software Layers (skipped with a heavy heart, but see picture)
Layers of abstraction as usual prove to be effective. Most systems
are believed to use the following layers (but for many systems, the OS
code is not available for inspection).
- User level I/O routines.
- Device independent I/O software.
- Device drivers.
- Interrupt handlers.
We will give a bottom up explanation.
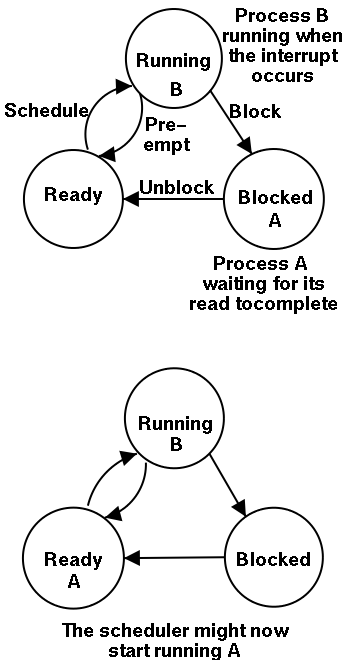
5.3.1: Interrupt Handlers
We discussed an interrupt handler before when studying page faults.
Then it was called ``assembly language code''.
In the present case, we have a process blocked on I/O and the I/O
event has just completed. So the goal is to make the process ready.
Possible methods are.
- Releasing a semaphore on which the process is waiting.
- Sending a message to the process.
- Inserting the process table entry onto the ready list.
Once the process is ready, it is up to the scheduler to decide when
it should run.
5.3.2: Device Drivers
The portion of the OS that ``knows'' the characteristics of the
controller.
The driver has two ``parts'' corresponding to its two access
points. Recall the following figure from the beginning of the course.
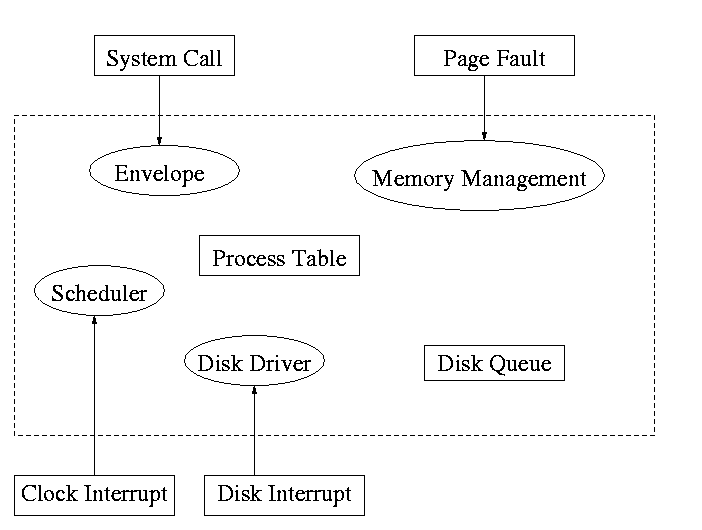
- Accessed by the main line OS via the envelope in response to an I/O
system call. The portion of the driver accessed in this way is
sometimes call the ``top'' part.
- Accessed by the interrupt handler when the I/O completes (this
completion is signaled by an interrupt). The portion of the driver
accessed in this way is sometimes call the ``bottom'' part.
Tanenbaum describes the actions of the driver assuming it is
implemented as a process (which he recommends). I give both that view
point and the self-service paradigm in which the driver is invoked by
the OS acting in behalf of a user process (more precisely the process
shifts into kernel mode).
Driver in a self-service paradigm
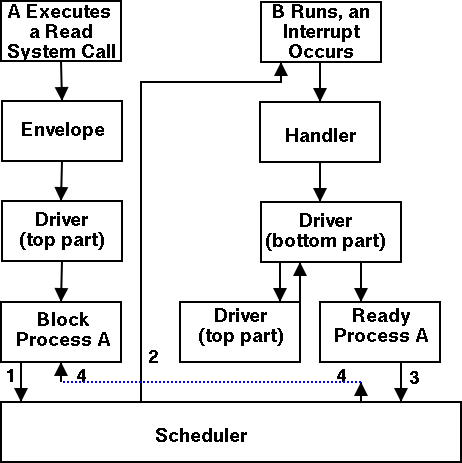
- The user (A) issues an I/O system call.
- The main line, machine independent, OS prepares a
generic request for the driver and calls (the top part of)
the driver.
- If the driver was idle (i.e., the controller was idle), the
driver writes device registers on the controller ending with a
command for the controller to begin the actual I/O.
- If the controller was busy (doing work the driver gave it
previously), the driver simply queues the current request (the
driver dequeues this request below).
- The driver jumps to the scheduler indicating that the current
process should be blocked.
- The scheduler blocks A and runs (say) B.
- B starts running.
- An interrupt arrives (i.e., an I/O has been completed).
- The interrupt handler invokes (the bottom part of) the driver.
- The driver informs the main line perhaps passing data and
surely passing status (error, OK).
- The top part is called to start another I/O if the queue is
nonempty. We know the controller is free. Why?
Answer: We just received an interrupt saying so.
- The driver jumps to the scheduler indicating that process A should
be made ready.
- The scheduler picks a ready process to run. Assume it picks A.
- A resumes in the driver, which returns to the main line, which
returns to the user code.
Driver as a process (Tanenbaum) (less detailed than above)
- The user issues an I/O request. The main line OS prepares a
generic request (e.g. read, not read using Buslogic BT-958 SCSI controller)
for the driver and the driver is awakened (perhaps a message is sent to
the driver to do both jobs).
- The driver wakes up.
- If the driver was idle (i.e., the controller is idle), the
driver writes device registers on the controller ending with a
command for the controller to begin the actual I/O.
- If the controller is busy (doing work the driver gave it), the
driver simply queues the current request (the driver dequeues this
below).
- The driver blocks waiting for an interrupt or for more
requests.
- An interrupt arrives (i.e., an I/O has been completed).
- The driver wakes up.
- The driver informs the main line perhaps passing data and
surely passing status (error, OK).
- The driver finds the next work item or blocks.
- If the queue of requests is non-empty, dequeue one and
proceed as if just received a request from the main line.
- If queue is empty, the driver blocks waiting for an
interrupt or a request from the main line.
5.3.3: Device-Independent I/O Software
The device-independent code does most of the functionality, but not
necessarily most of the code since there can be many drivers
all doing essentially the same thing in slightly different ways due to
slightly different controllers.
- Naming. Again an important O/S functionality.
Must offer a consistent interface to the device drivers.
- In Unix this is done by associating each device with a
(special) file in the /dev directory.
- The inodes for these files contain an indication that these
are special files and also contain so called major and minor
device numbers.
- The major device number gives the number of the driver.
(These numbers are rather ad hoc, they correspond to the position
of the function pointer to the driver in a table of function
pointers.)
- The minor number indicates for which device (e.g., which scsi
cdrom drive) the request is intended
- Protection. A wide range of possibilities are
actually done in real systems. Including both extreme examples of
everything is permitted and nothing is permitted (directly).
- In ms-dos any process can write to any file. Presumably, our
offensive nuclear missile launchers do not run dos.
- In IBM and other mainframe OS's, normal processors do not
access devices. Indeed the main CPU doesn't issue the I/O
requests. Instead an I/O channel is used and the mainline
constructs a channel program and tells the channel to invoke it.
- Unix uses normal rwx bits on files in /dev (I don't believe x
is used).
- Buffering is necessary since requests come in a
size specified by the user and data is delivered in a size specified
by the device.
- Enforce exclusive access for non-shared devices
like tapes.
5.3.4: User-Space Software
A good deal of I/O code is actually executed in user space. Some
is in library routines linked into user programs and some is in daemon
processes.
- Some library routines are trivial and just move their arguments
into the correct place (e.g., a specific register) and then issue a
trap to the correct system call to do the real work.
- Some, notably standard I/O (stdio) in Unix, are definitely not
trivial. For example consider the formatting of floating point
numbers done in printf and the reverse operation done in scanf.
- Printing to a local printer is often performed in part by a
regular program (lpr in Unix) and part by a daemon
(lpd in Unix).
The daemon might be started when the system boots or might be started
on demand. I guess it is called a daemon because it is not under the
control of any user. Does anyone know the
reason.
- Printing uses spooling, i.e., the file to be
printed is copied somewhere by lpr and then the daemon works with this
copy. Mail uses a similar technique (but generally it is called
queuing, not spooling).
Homework: 10, 13.
5.4: Disks
The ideal storage device is
- Fast
- Big (in capacity)
- Cheap
- Impossible
Disks are big and cheap, but slow.
5.4.1: Disk Hardware
Show a real disk opened up and illustrate the components
- Platter
- Surface
- Head
- Track
- Sector
- Cylinder
- Seek time
- Rotational latency
- Transfer time
Overlapping I/O operations is important. Many controllers can do
overlapped seeks, i.e. issue a seek to one disk while another is
already seeking.
Modern disks cheat and do not have the
same number of sectors on outer cylinders as on inner one. However,
the disks have electronics and software (firmware) that hides the
cheat and gives the illusion of the same number of sectors on all
cylinders.
(Unofficial) Despite what tanenbaum says later, it is not true that
when one head is reading from cylinder C, all the heads can read from
cylinder C with no penalty. It is, however, true that the penalty is
very small.
Choice of block size
- We discussed this before when studying page size.
- Current commodity disk characteristics (not for laptops) result in
about 15ms to transfer the first byte and 10K bytes per ms for
subsequent bytes (if contiguous).
- Rotation rate is 5400, 7600, or 10,000 RPM (15K just now
available).
- Recall that 6000 RPM is 100 rev/sec or one rev
per 10ms. So half a rev (the average time for to rotate to a
given point) is 5ms.
- Transfer rates around 10MB/sec = 10KB/ms.
- Seek time around 10ms.
- This favors large blocks, 100KB or more.
- But the internal fragmentation would be severe since many files
are small.
- Multiple block sizes have been tried as have techniques to try to
have consecutive blocks of a given file near each other.
- Typical block sizes are 4KB-8KB.
Homework:
Consider a disk with an average seek time of 10ms, an average
rotational latency of 5ms, and a transfer rate of 10MB/sec.
- If the block size is 1KB, how long would it take to read a block?
- If the block size is 100KB, how long would it take to read a
block?
- If the goal is to read 1K, a 1KB block size is better as the
remaining 99KB are wasted. If the goal is to read 100KB, the 100KB
block size is better since the 1KB block size needs 100 seeks and 100
rotational latencies. What is the minimum size request for which a
disk with a 100KB block size would complete faster than one with a 1KB
block size?
RAID (Redundant Array of Inexpensive Disks) (Skipped)
- The name RAID is from Berkeley.
- IBM changed the name to Redundant Array of Independent
Disks. I wonder why?
- A simple form is mirroring, where two disks contain the
same data.
- Another simple form is striping (interleaving) where consecutive
blocks are spread across multiple disks. This helps bandwidth, but is
not redundant. Thus it shouldn't be called RAID, but it sometimes is.
- One of the normal RAID methods is to have N (say 4) data disks and one
parity disk. Data is striped across the data disks and the bitwise
parity of these sectors is written in the corresponding sector of the
parity disk.
- On a read if the block is bad (e.g., if the entire disk is bad or
even missing), the system automatically reads the other blocks in the
stripe and the parity block in the stripe. Then the missing block is
just the bitwise exclusive or of all these blocks.
- For reads this is very good. The failure free case has no penalty
(beyond the space overhead of the parity disk). The error case
requires N+1 (say 5) reads.
- A serious concern is the small write problem. Writing a sector
requires 4 I/O. Read the old data sector, compute the change, read
the parity, compute the new parity, write the new parity and the new
data sector. Hence one sector I/O became 4, which is a 300% penalty.
- Writing a full stripe is not bad. Compute the parity of the N
(say 4) data sectors to be written and then write the data sectors and
the parity sector. Thus 4 sector I/Os become 5, which is only a 25%
penalty and is smaller for larger N, i.e., larger stripes.
- A variation is to rotate the parity. That is, for some stripes
disk 1 has the parity, for others disk 2, etc. The purpose is to not
have a single parity disk since that disk is needed for all small
writes and could become a point of contention.
5.4.2: Disk Formatting
Skipped.
5.4.3: Disk Arm Scheduling Algorithms
There are three components to disk response time: seek, rotational
latency, and transfer time. Disk arm scheduling is concerned with
minimizing seek time by reordering the requests.
These algorithms are relevant only if there are several I/O
requests pending. For many PCs this is not the case. For most
commercial applications, I/O is crucial and there are often many
requests pending.
- FCFS (First Come First Served): Simple but has long delays.
- Pick: Same as FCFS but pick up requests for cylinders that are
passed on the way to the next FCFS request.
- SSTF or SSF (Shortest Seek (Time) First): Greedy algorithm. Can
starve requests for outer cylinders and almost always favors middle
requests.
- Scan (Look, Elevator): The method used by an old fashioned
jukebox (remember ``Happy Days'') and by elevators. The disk arm
proceeds in one direction picking up all requests until there are no
more requests in this direction at which point it goes back the other
direction. This favors requests in the middle, but can't starve any
requests.
- C-Scan (C-look, Circular Scan/Look): Similar to Scan but only
service requests when moving in one direction. When going in the
other direction, go directly to the furthest away request. This
doesn't favor any spot on the disk. Indeed, it treats the cylinders
as though they were a clock, i.e. after the highest numbered cylinder
comes cylinder 0.
- N-step Scan: This is what the natural implementation of Scan
gives.
- While the disk is servicing a Scan direction, the controller
gathers up new requests and sorts them.
- At the end of the current sweep, the new list becomes the next
sweep.
Minimizing Rotational Latency
Use Scan based on sector numbers not cylinder number. For
rotational latency Scan which is the same as C-Scan. Why?
Ans: Because the disk only rotates in one direction.
Homework: 24, 25
5.4.4: Error Handling
Disks error rates have dropped in recent years. Moreover, bad
block forwarding is normally done by the controller (or disk electronic) so
this topic is no longer as important for OS.
5.5: Clocks
Also called timers.
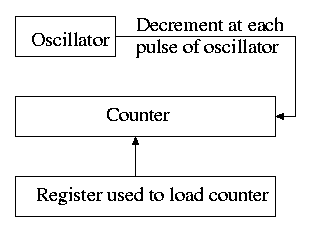
5.5.1: Clock Hardware
- Generates an interrupt when timer goes to zero
- Counter reload can be automatic or under software (OS) control.
- If done automatically, the interrupt occurs periodically and thus
is perfect for generating a clock interrupt at a fixed period.
5.5.2: Clock Software
- TOD: Bump a counter each tick (clock interupt). If counter is
only 32 bits must worry about overflow so keep two counters: low order
and high order.
- Time quantum for RR: Decrement a counter at each tick. The quantum
expires when counter is zero. Load this counter when the scheduler
runs a process.
- Accounting: At each tick, bump a counter in the process table
entry for the currently running process.
- Alarm system call and system alarms:
- Users can request an alarm at some future time.
- The system also on occasion needs to schedule some of its own
activities to occur at specific times in the future (e.g. turn off
the floppy motor).
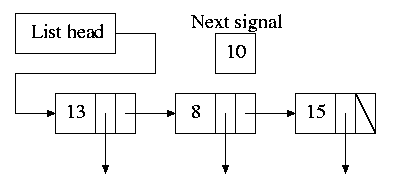
- The conceptually simplest solution is to have one timer for
each event.
- Instead, we simulate many timers with just one.
- The data structure on the right works well.
- The time in each list entry is the time after the
preceding entry that this entry's alarm is to ring.
- For example, if the time is zero, this event occurs at the
same time as the previous event.
- The other entry is a pointer to the action to perform.
- At each tick, decrement next-signal.
- When next-signal goes to zero,
process the first entry on the list and any others following
immediately after with a time of zero (which means they are to be
simultaneous with this alarm). Then set next-signal to the value
in the next alarm.
- Profiling
- Want a histogram giving how much time was spent in each 1KB
(say) block of code.
- At each tick check the PC and bump the appropriate counter.
- A user-mode program can determine the software module
associated with each 1K block.
- If we use finer granularity (say 10B instead of 1KB), we get
increased accuracy but more memory overhead.
Homework: 27
5.6: Character-Oriented Terminals (skipped)
5.6.1: RS-232 Terminal Hardware
Quite dated. It is true that modern systems can communicate to a
hardwired ascii terminal, but most don't. Serial ports are used, but
they are normally connected to modems and then some protocol (SLIP,
PPP) is used not just a stream of ascii characters. So skip this
section.
Memory-Mapped Terminals
Not as dated as the previous section but it still discusses the
character not graphics interface.
- Today, software writes into video memory
the bits that are to be put on the screen and then the graphics
controller
converts these bits to analog signals for the monitor (actually laptop
displays and some modern monitors are digital).
- But it is much more complicated than this. The graphics
controllers can do a great deal of video themselves (like filling).
- This is a subject that would take many lectures to do well.
- I believe some of this is covered in 201.
Keyboards
Tanenbaum description of keyboards is correct.
- At each key press and key release a code is written into the
keyboard controller and the computer is interrupted.
- By remembering which keys have been depressed and not released
the software can determine Cntl-A, Shift-B, etc.
5.6.2: Input Software
- We are just looking at keyboard input. Once again graphics is too
involved to be treated here.
- There are two fundamental modes of input, sometimes called
raw and cooked.
- In raw mode the application sees every ``character'' the user
types. Indeed, raw mode is character oriented.
- All the OS does is convert the keyboard ``scan codes'' to
``characters'' and and pass these characters to the application.
- Some examples
- down-cntl down-x up-x up-cntl is converted to cntl-x
- down-cntl up-cntl down-x up-x is converted to x
- down-cntl down-x up-cntl up-x is converted to cntl-x (I just
tried it to be sure).
- down-x down-cntl up-x up-cntl is converted to x
- Full screen editors use this mode.
- Cooked mode is line oriented. The OS delivers lines to the
application program.
- Special characters are interpreted as editing characters
(erase-previous-character, erase-previous-word, kill-line, etc).
- Erased characters are not seen by the application but are
erased by the keyboard driver.
- Need an escape character so that the editing characters can be
passed to the application if desired.
- The cooked characters must be echoed (what should one do if the
application is also generating output at this time?)
- The (possibly cooked) characters must be buffered until the
application issues a read (and an end-of-line EOL has been received
for cooked mode).
5.6.3: Output Software
Again too dated and the truth is too complicated to deal with in a
few minutes.
5.7: Graphical User Interfaces (GUIs)
Skipped.
5.8: Network Terminals
Skipped.
5.9: Power Management
Skipped.
5.10: Research on Input/Output
Skipped.
5.11: Summary
Read.