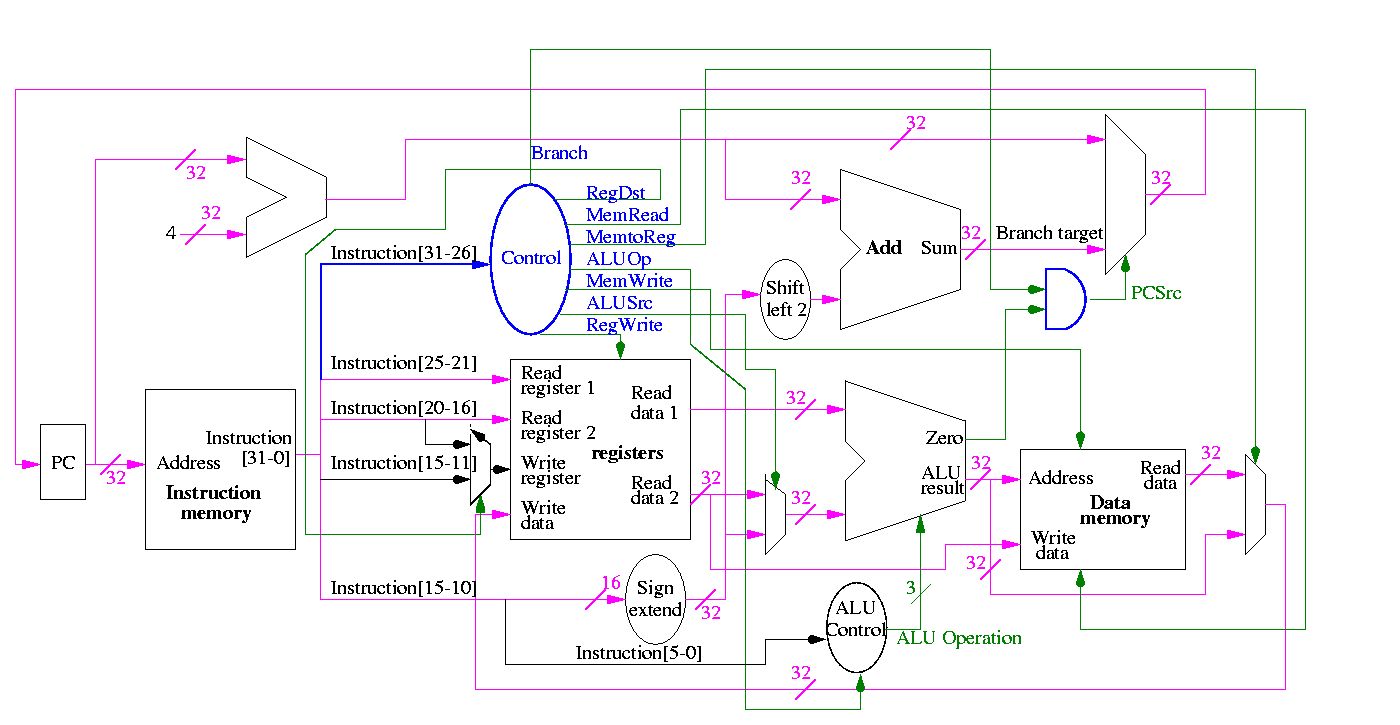
Now we need the main control
So 9 bits
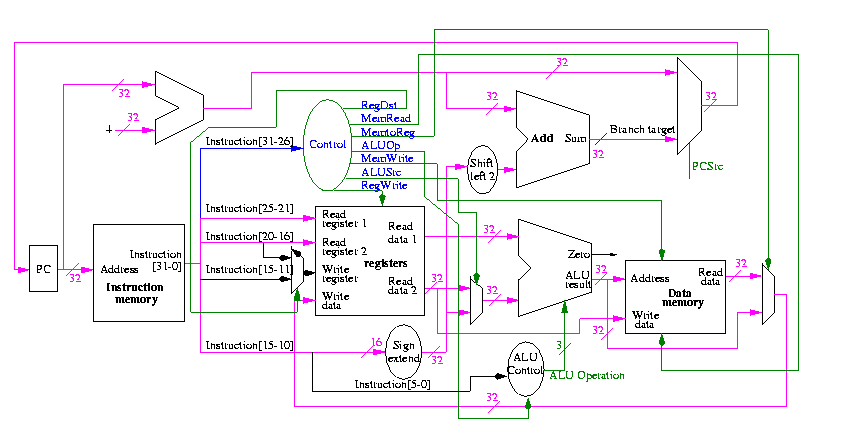
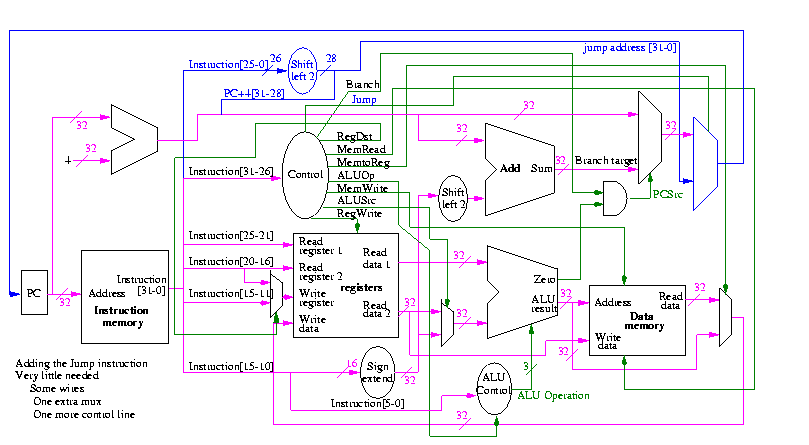
The following figure shows where these occur.
They all are determined by the opcode
The MIPS instruction set is fairly regular. Most fields we need are always in the same place in the instruction.
| MemRead: | Memory delivers the value stored at the specified addr |
| MemWrite: | Memory stores the specified value at the specified addr |
| ALUSrc: | Second ALU operand comes from (reg-file / sign-ext-immediate) |
| RegDst: | Number of reg to write comes from the (rt / rd) field |
| RegWrite: | Reg-file stores the specified value in the specified register |
| PCSrc: | New PC is Old PC+4 / Branch target |
| MemtoReg: | Value written in reg-file comes from (alu / mem) |
We have seen the wiring before (and given a hardcopy handout)
We are interested in four opcodes
Do a stage play
add r9,r5,r1 r9=r5+r1 0 5 1 9 0 32 sub r9,r9,r6 0 9 6 9 0 34 beq r9,r0,-8 4 9 0 < -2 > slt r1,r9,r0 0 9 0 1 0 42 lw r1,102(r2) 35 2 1 < 100 > sw r9,102(r2)
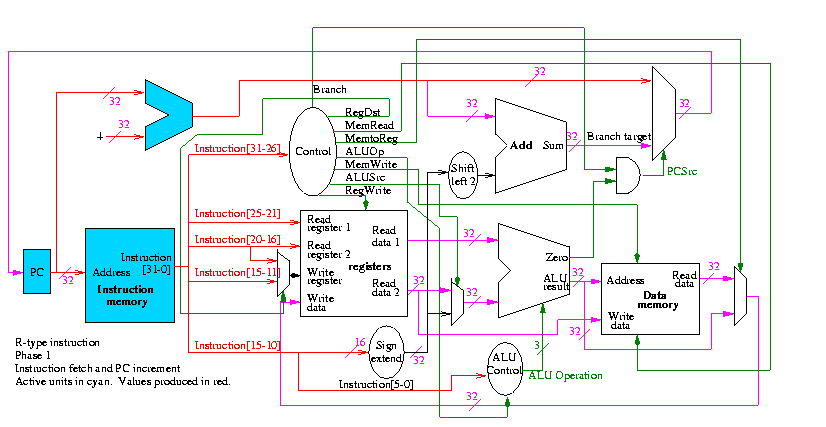
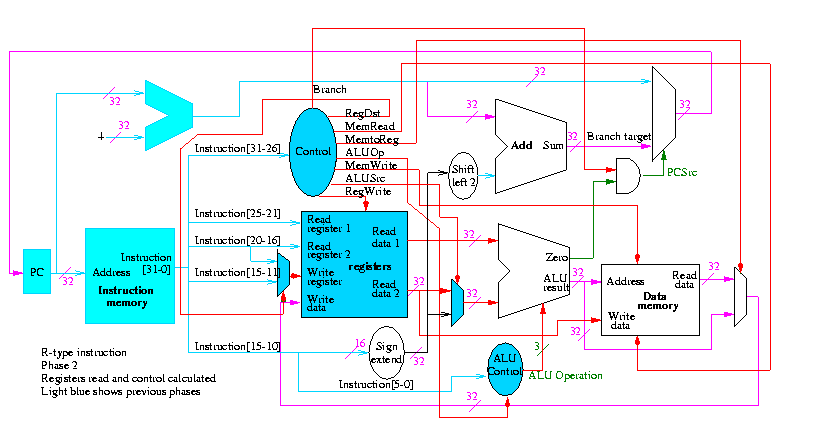
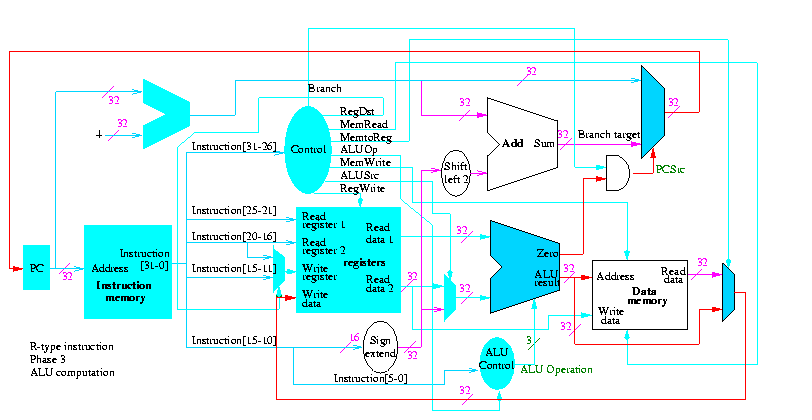
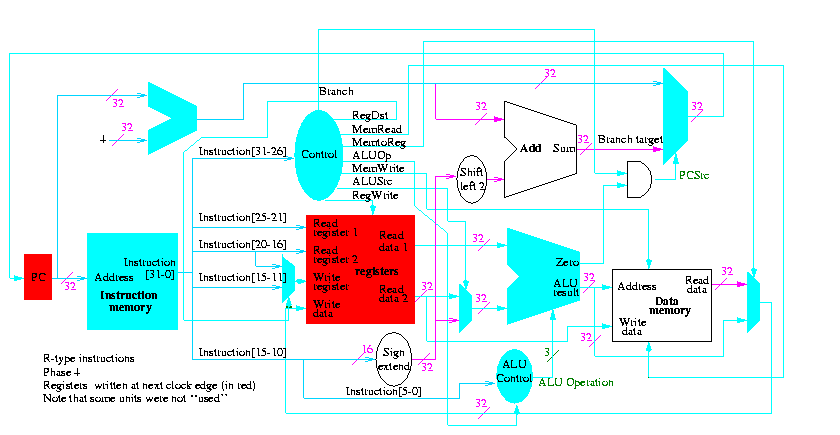
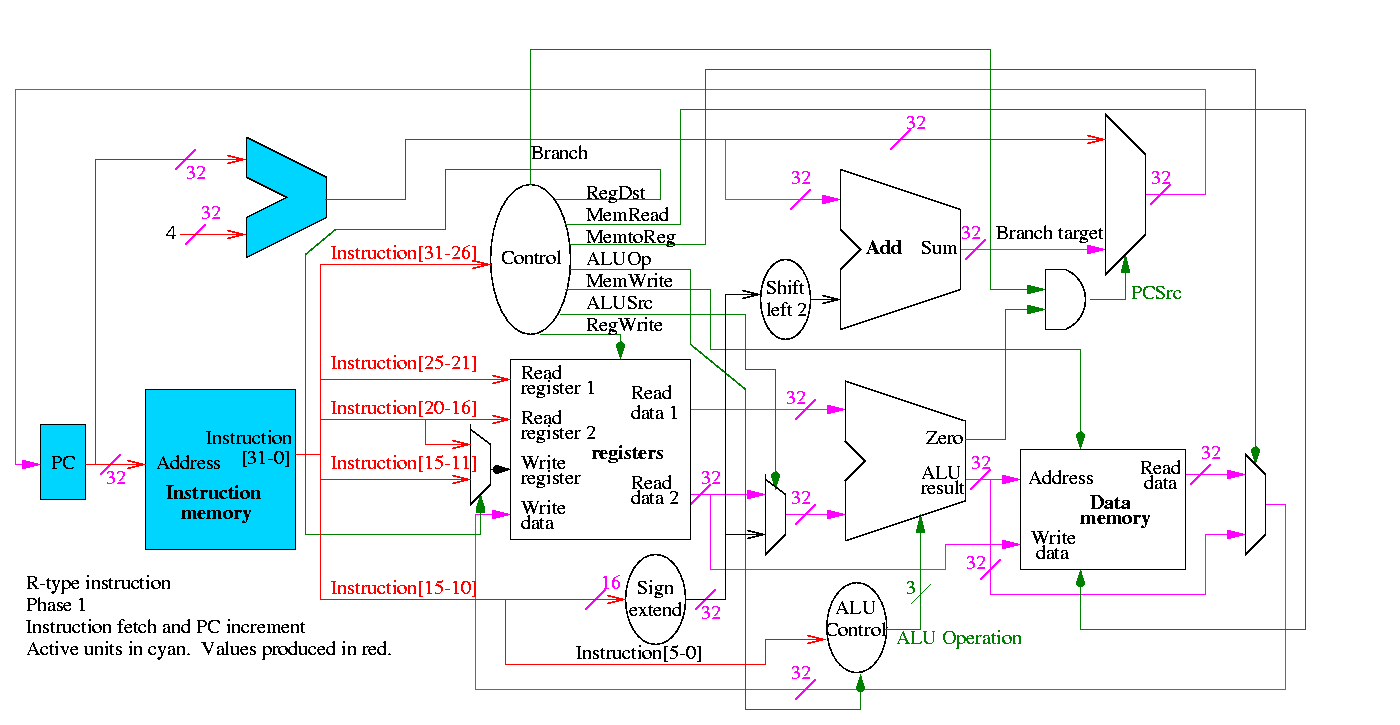
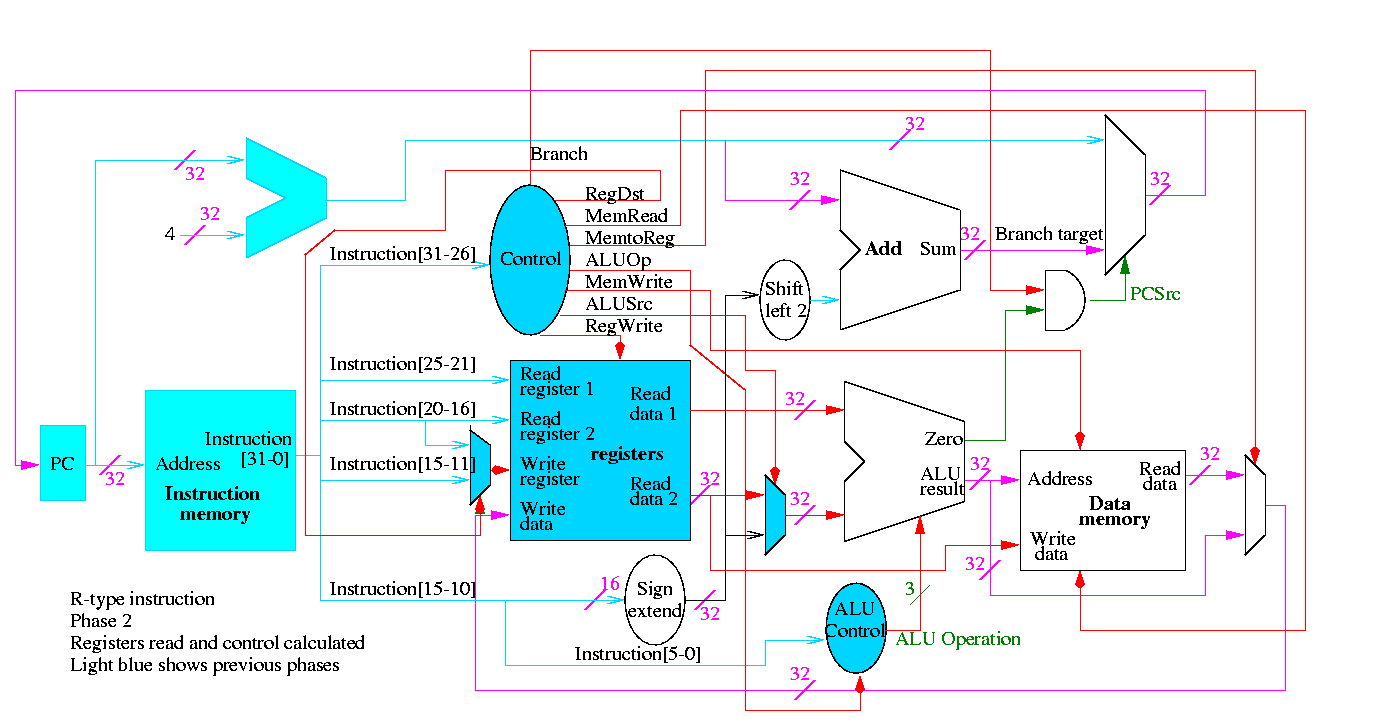
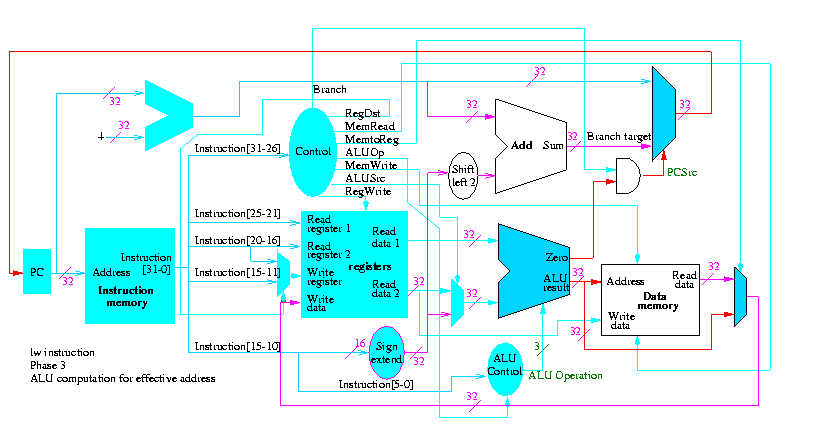
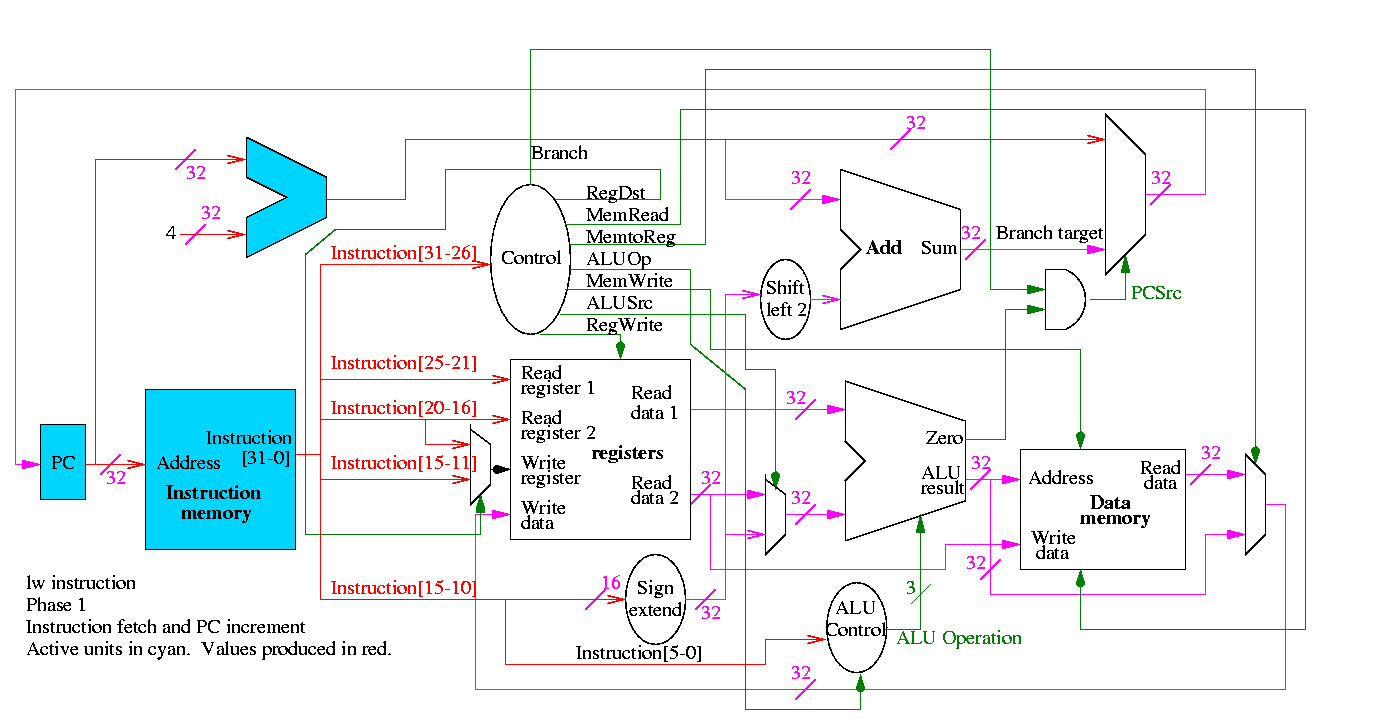
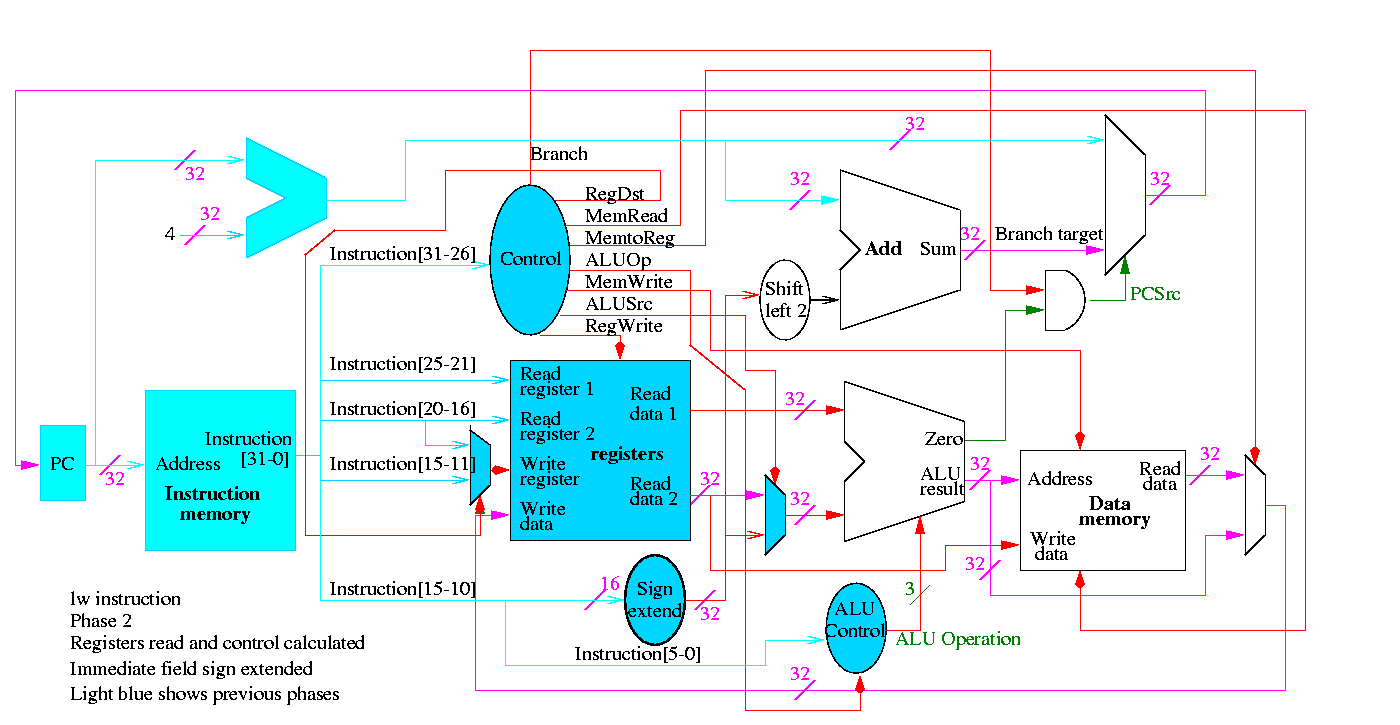
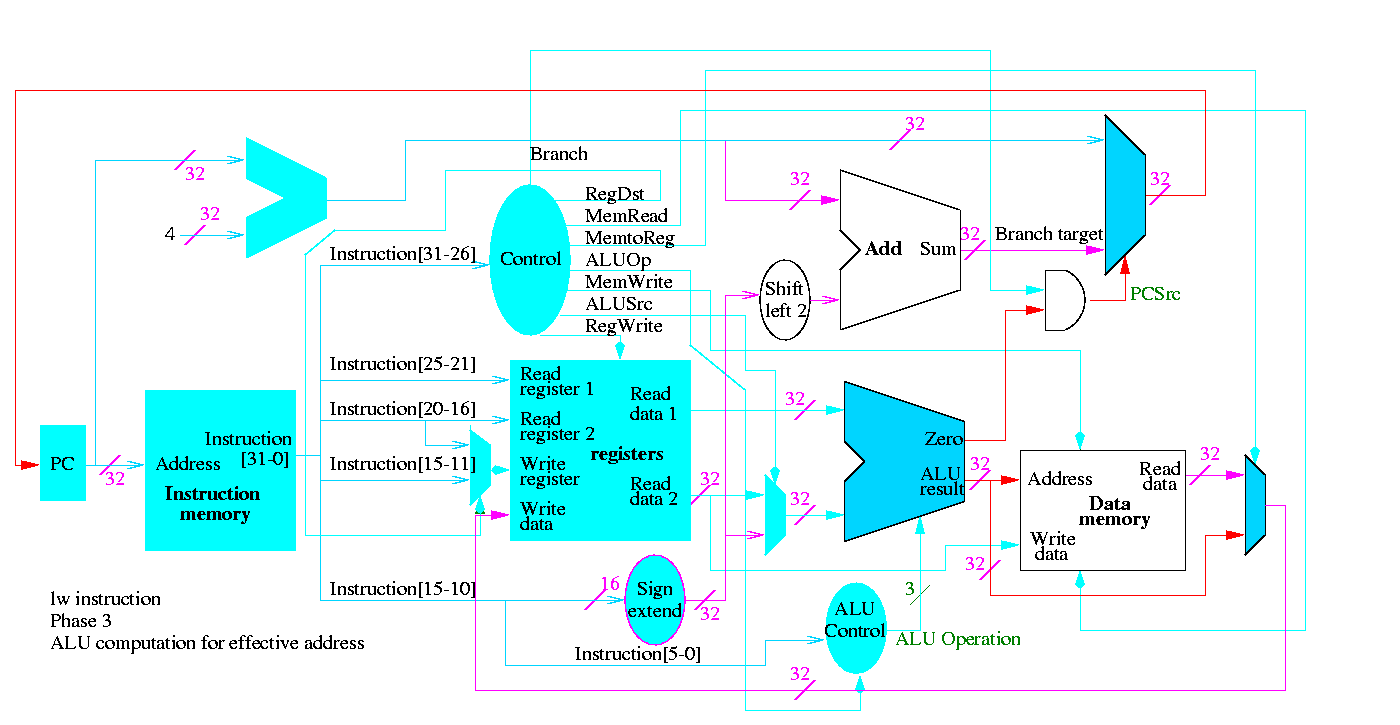
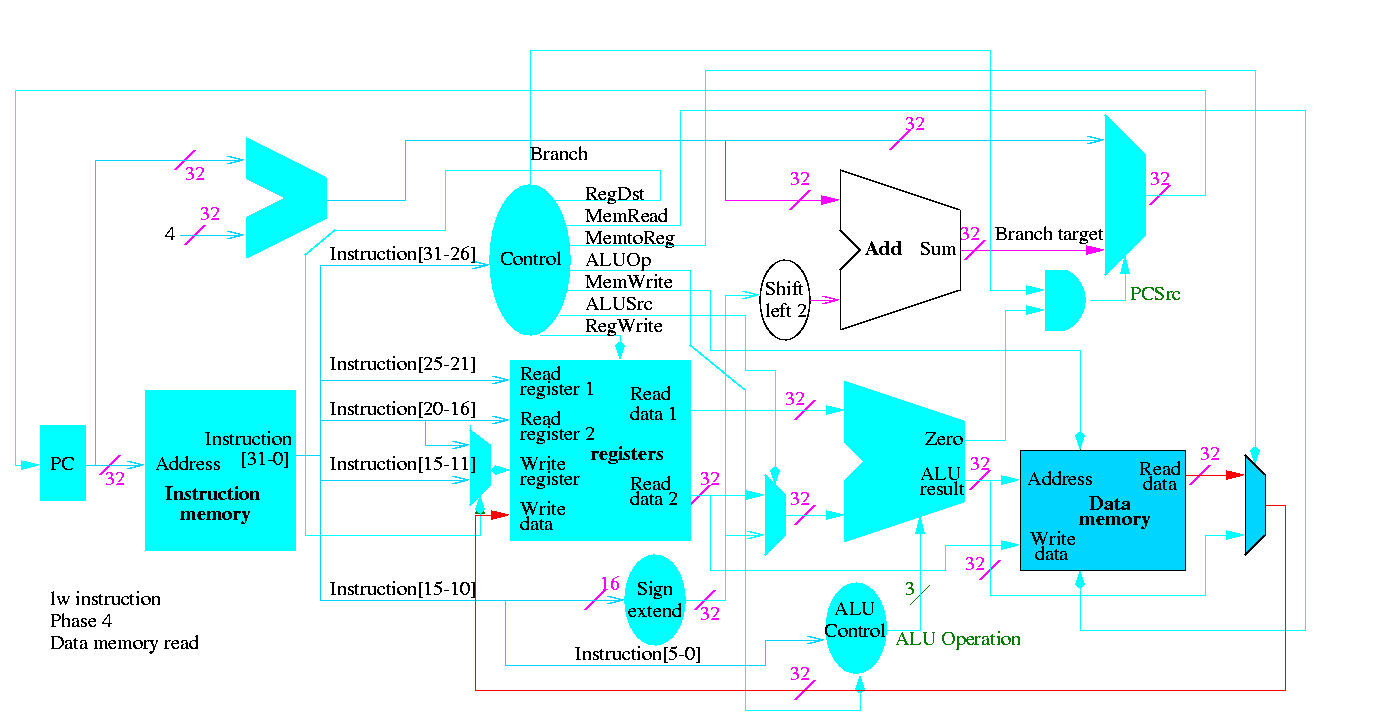
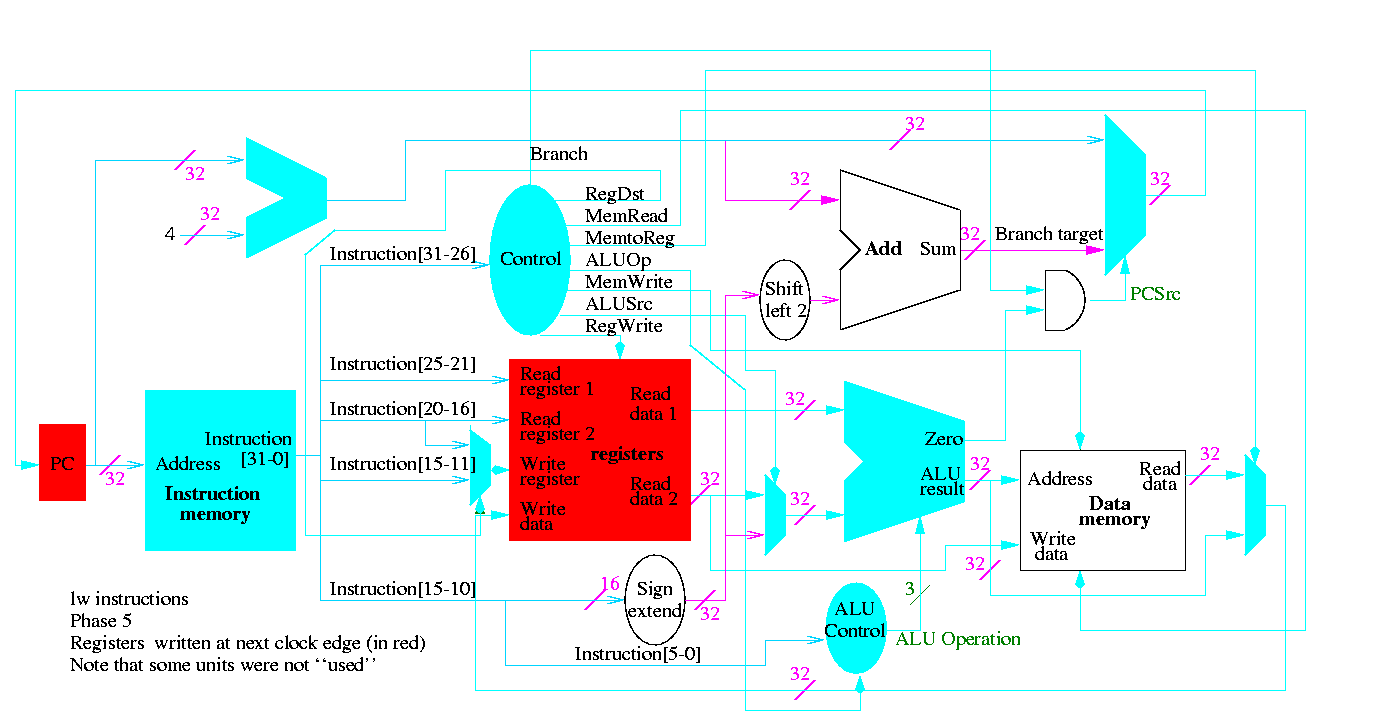
The following figures illustrate the play.
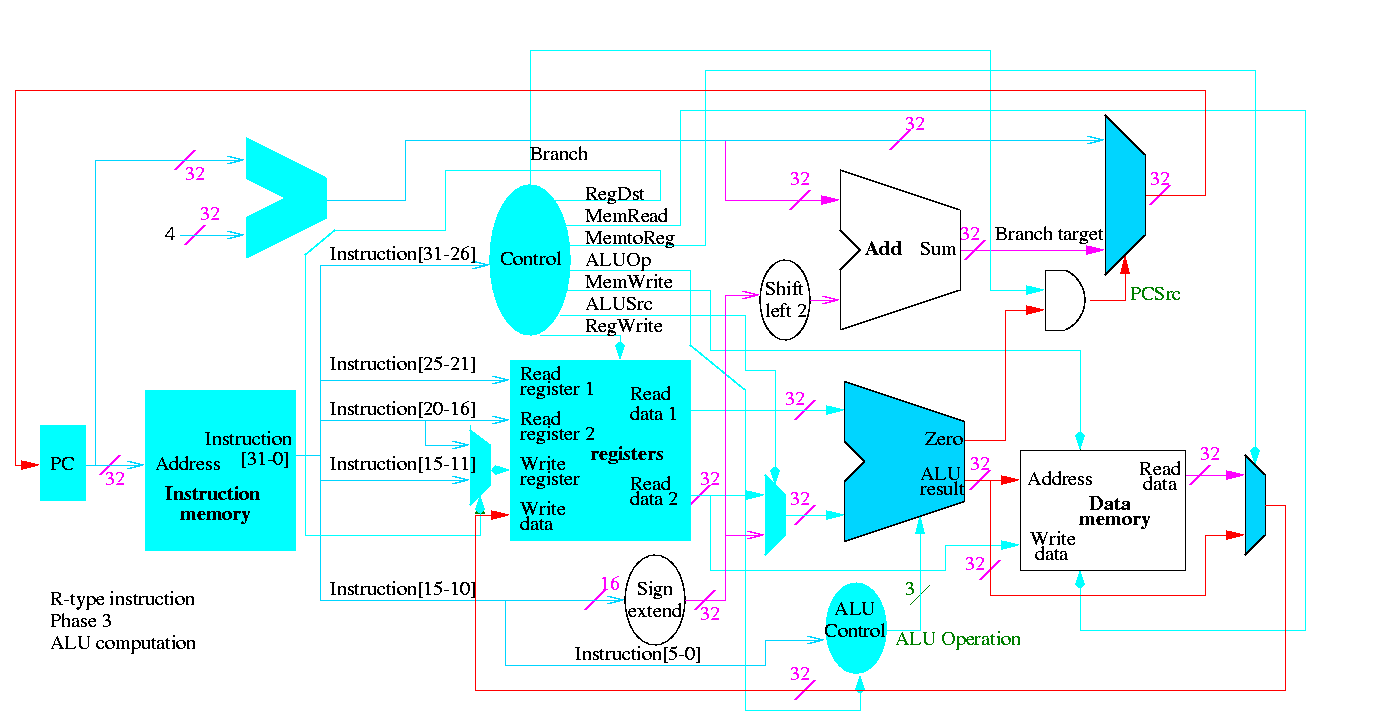
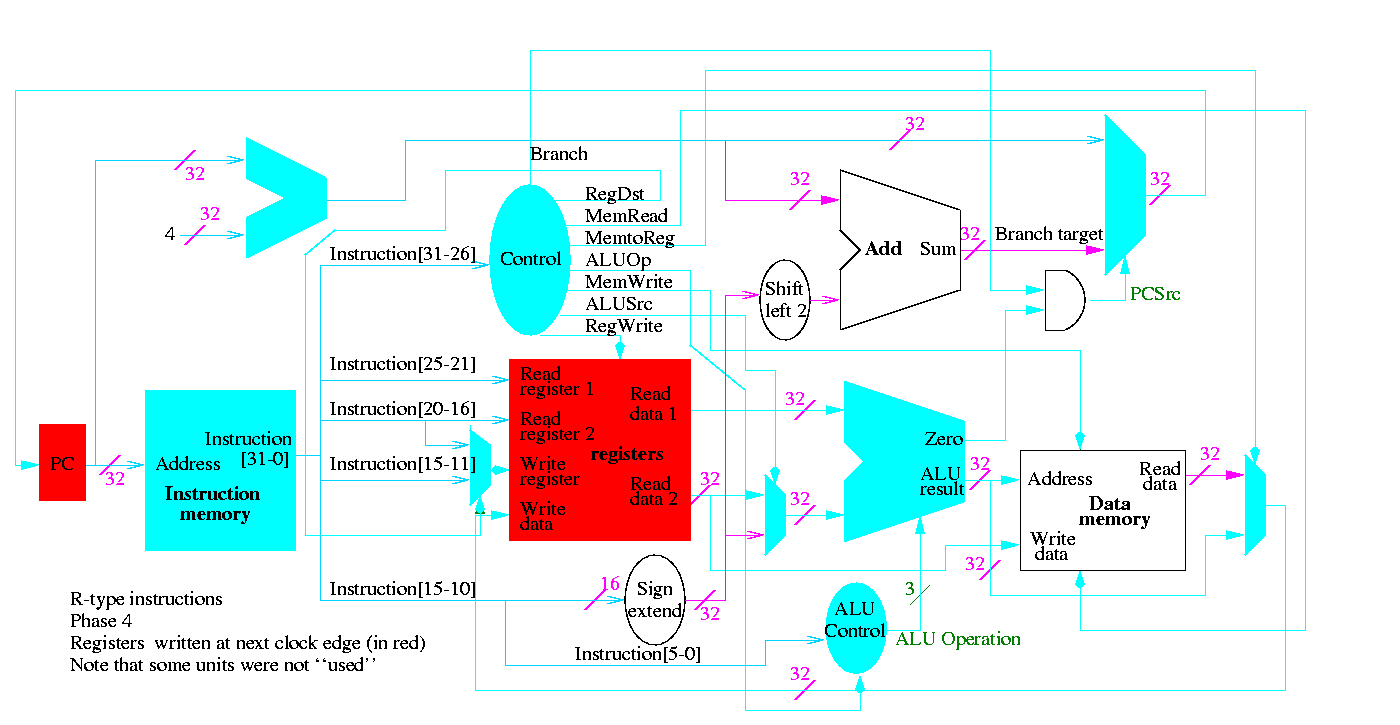
We start with R-type instructions
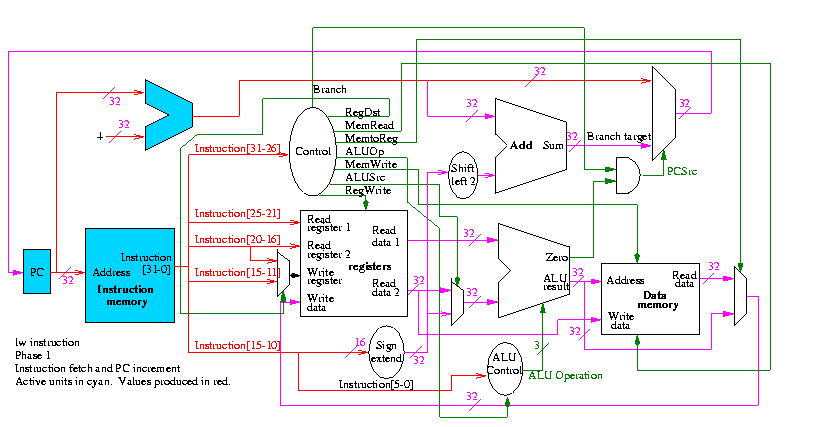
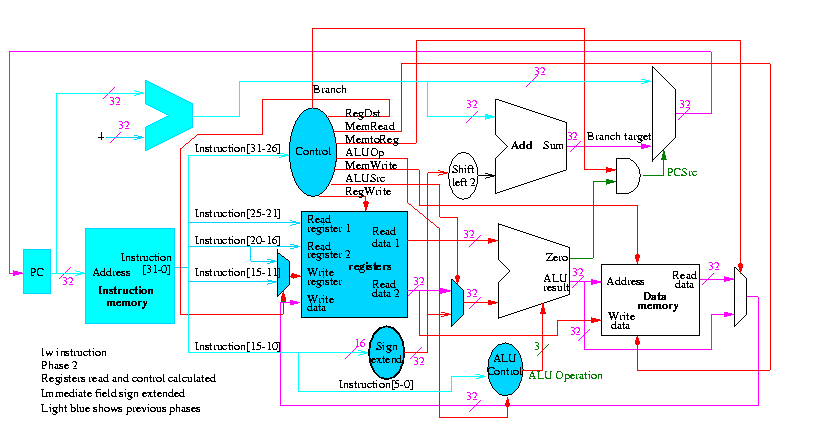
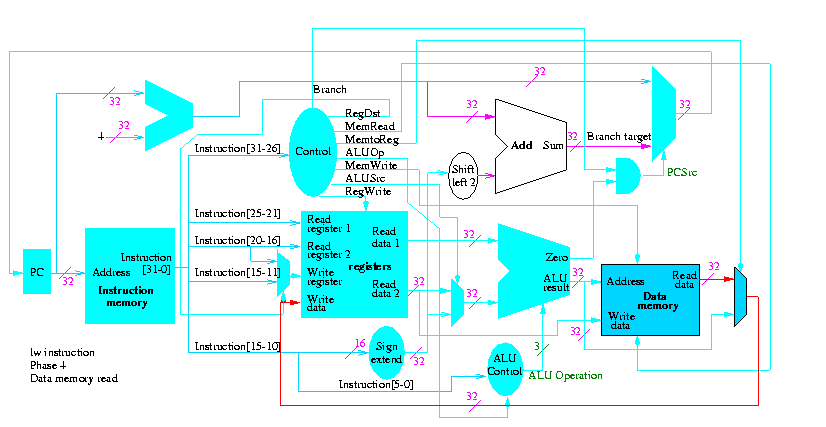
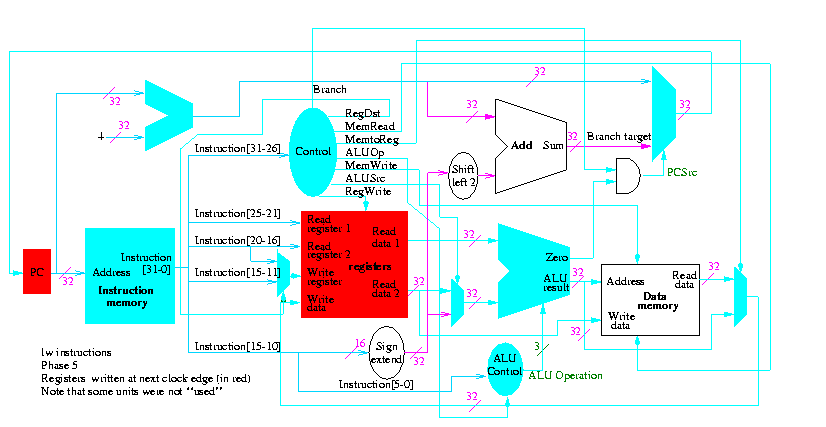
Next we show lw
The following truth table shows the settings for the control lines for each opcode. This is drawn differently since the labels of what should be the columns are long (e.g. RegWrite) and it is easier to have long labels for rows.
| Signal | R-type | lw | sw | beq |
|---|---|---|---|---|
| Op5 | 0 | 1 | 1 | 0 |
| Op4 | 0 | 0 | 0 | 0 |
| Op3 | 0 | 0 | 1 | 0 |
| Op2 | 0 | 0 | 0 | 1 |
| Op1 | 0 | 1 | 1 | 0 |
| Op0 | 0 | 1 | 1 | 0 |
| RegDst | 1 | 0 | X | X |
| ALUSrc | 0 | 1 | 1 | 0 |
| MemtoReg | 0 | 1 | X | X |
| RegWrite | 1 | 1 | 0 | 0 |
| MemRead | 0 | 1 | 0 | 0 |
| MemWrite | 0 | 0 | 1 | 0 |
| Branch | 0 | 0 | 0 | 1 |
| ALUOp1 | 1 | 0 | 0 | 0 |
| ALUOp | 0 | 0 | 0 | 1 |
Now it is straightforward but tedious to get the logic equations
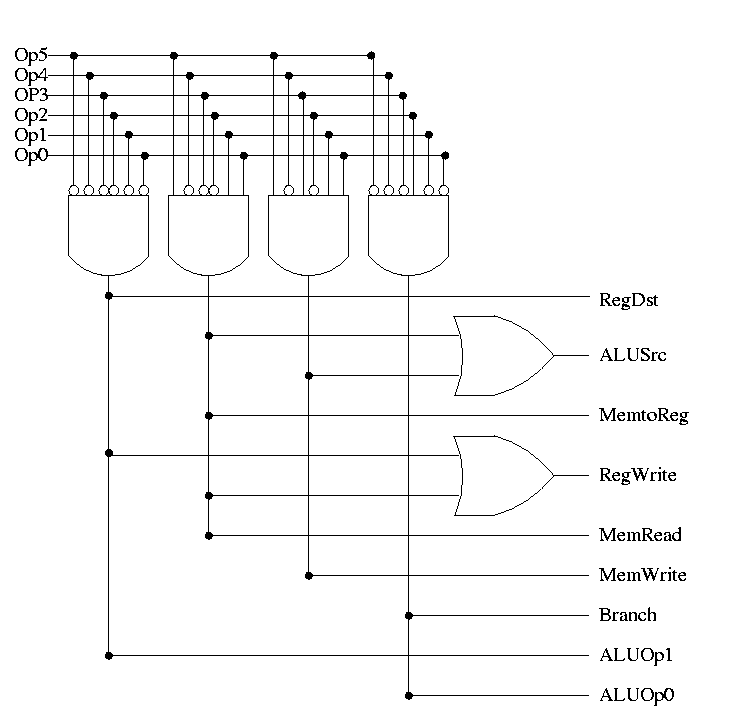
When drawn in pla style the circuit is
Homework: 5.5 and 5.11 control, 5.1, 5.2, 5.10 (just the single-cycle datapath) 5.11
opcode addr
31-26 25-0
Addr is word address; bottom 2 bits of PC are always 0
Top 4 bits of PC stay as they were (AFTER incr by 4)
Easy to add.
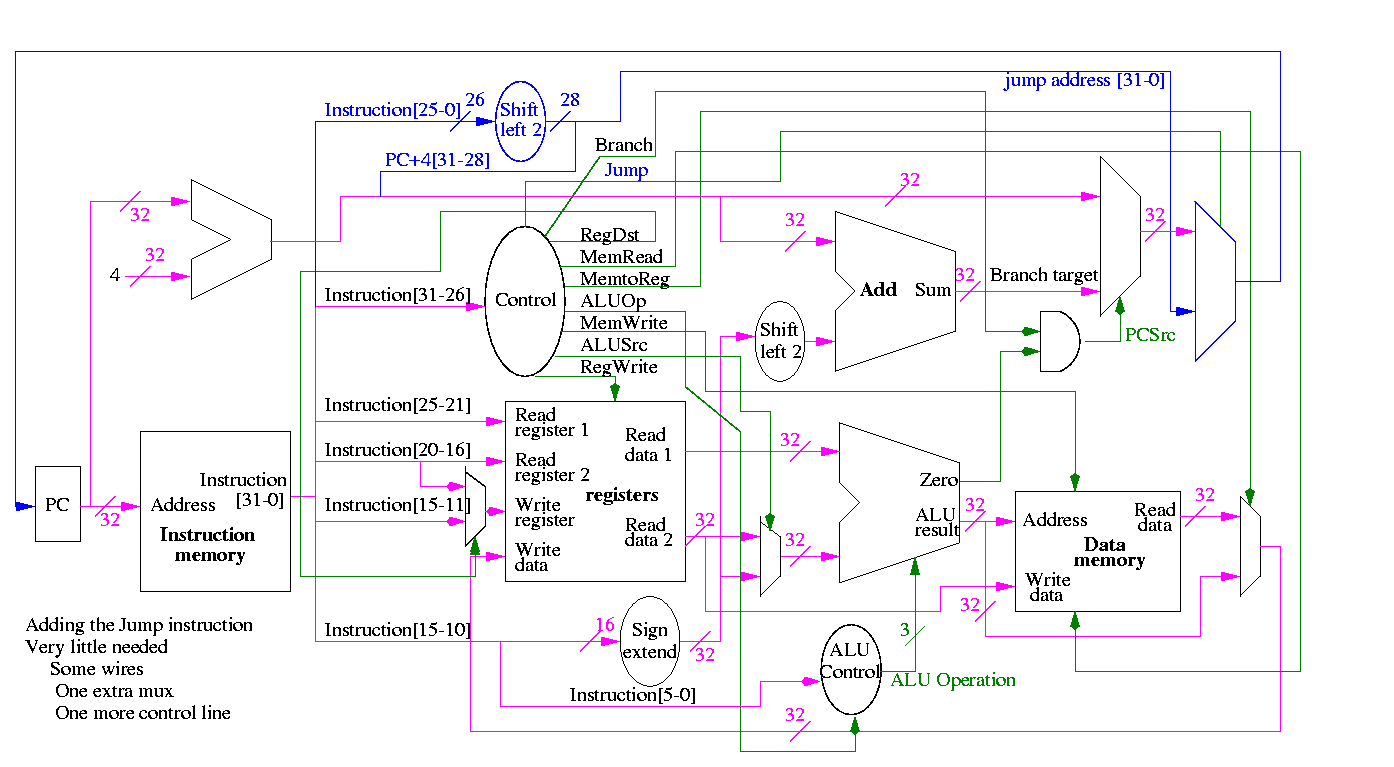
Smells like a good final exam type question.
Some instructions are likely slower than others and we must set the clock cycle time long enough for the slowest. The disparity between the cycle times needed for different instructions is quite significant when one considers implementing more difficult instructions, like divide and floating point ops.
Possible solutions